We have been exploring how to detect humans in the 3D space only using cameras, which are cheap, reliable and ubiquitous. Our major applications are autonomous vehicles and delivery robots. We focused on challenging cases (the long tail) and uncertainty estimation to improve the reliability of autonomous systems. We collected all our projects. in a single python library called monoloco library. Check it out on GitHub !
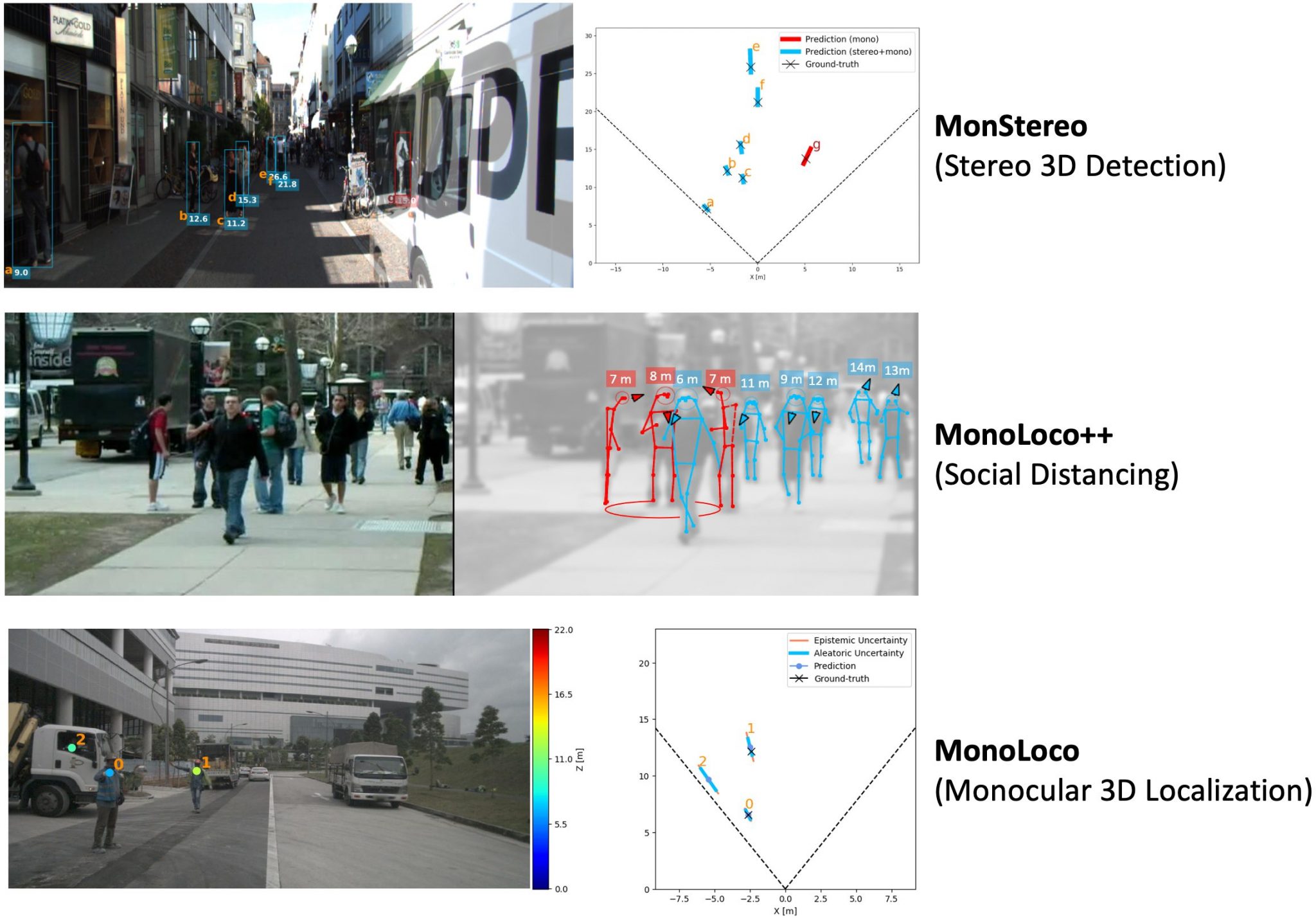
I. MonStereo: When Monocular and Stereo Meet at the Long Tail of 3D Human Localization → Project page / Article / Video
II. Perceiving Humans: From 3D Human Localization to Social Distancing → Project page / Article / Video
III. MonoLoco: Monocular 3D Pedestrian Localization and Uncertainty Estimation → Project page / Article / Video
IV. Joint Human Pose Estimation and Stereo 3D Localization → Project page / Article