Perception

Skeleton-based Action Recognition
Recognizing the actions performed by humans from their skeletons.
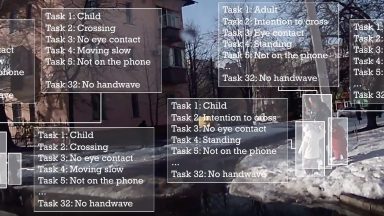
Detecting 32 Pedestrian Attributes for Autonomous Vehicles
Joint pedestrian detection and attribute recognition with fields and Multi-Task Learning.
Perception

Human Pose Estimation
PifPaf: Composite Fields for Human Pose estimation, CVPR’19
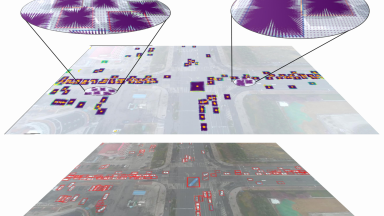
Object detection
Adapting fields for detection from aerial images

3D human detection
We have been exploring how to detect humans in the 3D space only using cameras, which are cheap, reliable and ubiquitous. Our major applications are autonomous vehicles and delivery robots. We focused on challenging cases (the long tail) and uncertainty estimation to improve the reliability of autonomous systems.
Perception
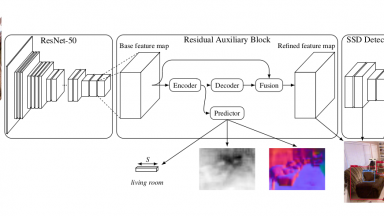
Multi-Task Learning with Auxiliary Tasks
Revisiting Multi-Task Learning with ROCK: a Deep Residual Auxiliary Block for Visual Detection, NeurIPS’18
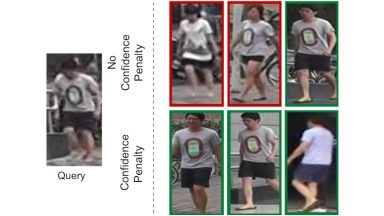
Visual Re-Identification
Deep Visual Re-Identification with Confidence, 2020

Super resolution & Style transfer
Perceptual Losses for Real-time Style Transfer and Single Image Super-Resolution, ECCV’16
Prediction

UniTraj
Open Source Unified Library for Vehicle Trajectory prediction (multiple datasets, multiple SOTa models, …)
Prediction

TrajNet++
Open Source Library for Human Trajectory prediction (e.g., official code for Social LSTM, Social Gan, etc…)
S-ATTack: Analyzing Trajectory Prediction Models
We introduce a socially-attended attack to assess the social understanding of prediction models.
Social GAN
Social GAN: Socially Acceptable Trajectories with Generative Adversarial Networks, CVPR’18
Prediction
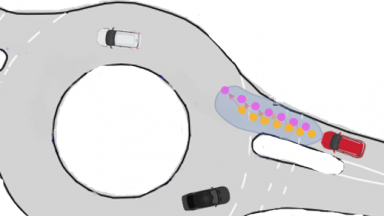
RRB
A vehicle trajectory prediction model which leverages both knowledge and data.
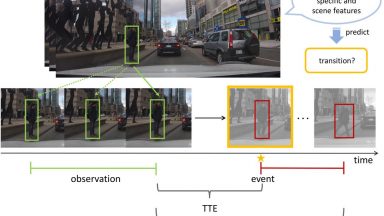
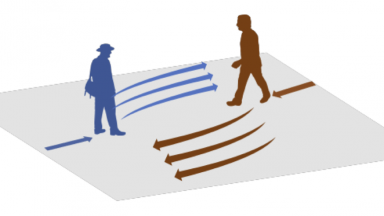
Pedestrian Stop and Go
Predicting whether pedestrians will stop walking (Stop) or start to walk (Go) in the near future, for better trajectory prediction around road traffic.
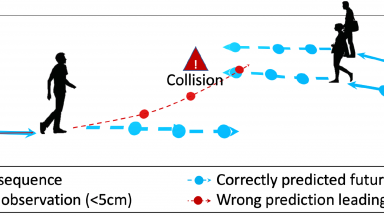
Pedestrian Bounding Box Prediction
A libary for predicting 2D and 3D bounding boxes of humans in autonomous driving scenarios
Planning

Crowd-Robot Interaction
Crowd-Robot Interaction: Crowd-aware Robot Navigation with Attention-based Deep Reinforcement Learning, ICRA’19
Generative models
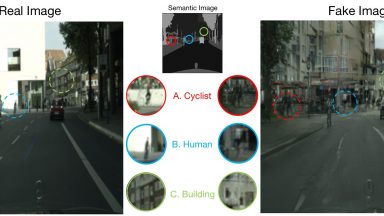
Semantically-aware Discriminators
We build on successful cGAN models to propose a new semantically-aware discriminator that better guides the generator. We aim to learn a shared latent representation that encodes enough information to jointly do semantic segmentation, content reconstruction, along with a coarse-to-fine grained adversarial reasoning.
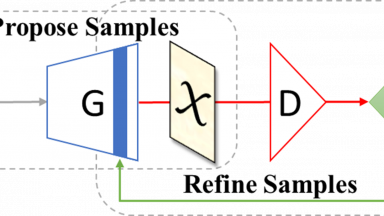
Collaborative Sampling in Generative Adversarial Networks
We propose a collaborative sampling scheme between the generator and discriminator for improved data generation. Guided by the discriminator, our approach refines generated samples through gradient-based optimization in the data (or feature / latent) space, shifting the generator distribution closer to the real data distribution.
Generating SVG
DeepSVG: A Hierarchical Generative Network for Vector Graphics Animation
Discrete Choice Models and Neural Networks
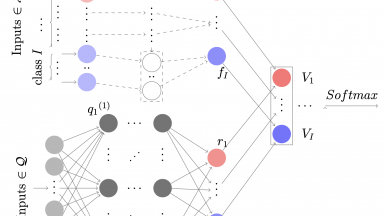
Discrete Choice Models and Neural Networks
Code for our new choice model referred to as the Learning Multinomial Logit (L-MNL)
Miscs
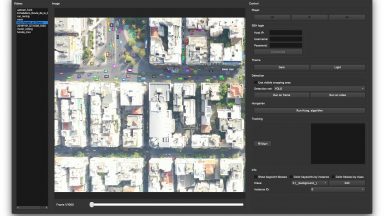
Ultimate labeling tool for videos
A multi-purpose Video Labeling GUI in Python with integrated SOTA detector and tracker. Developed using PyQt5