Human Trajectory Forecasting in Crowds
Parth Kothari, Sven Kreiss, Alexandre Alahi
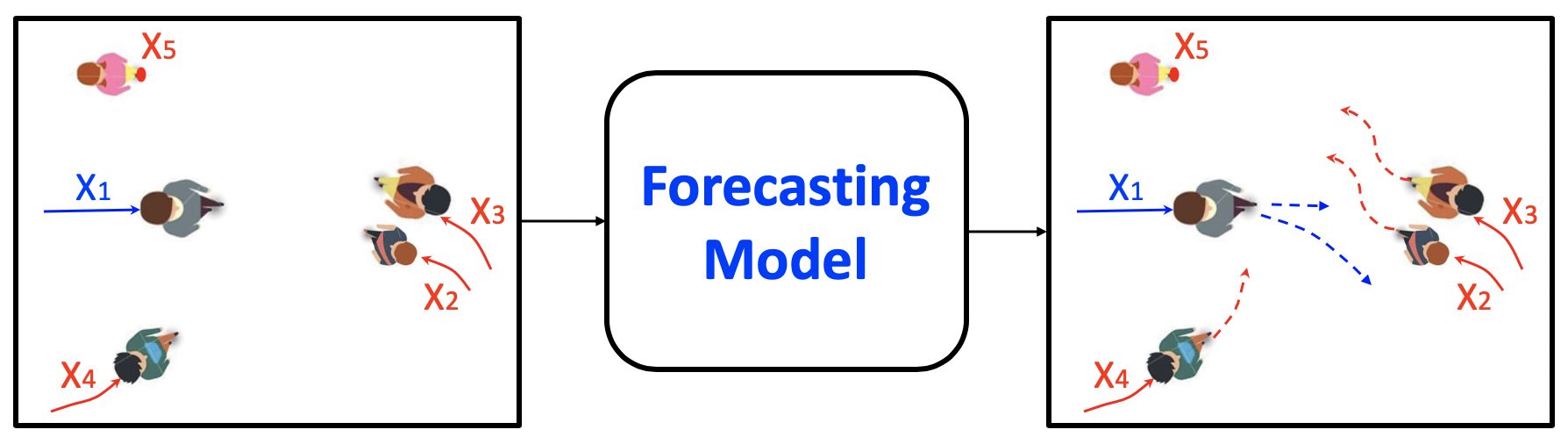
Since the past few decades, human trajectory forecasting has been a field of active research owing to its numerous real-world applications: evacuation situation analysis, traffic operations, deployment of social robots in crowded environments, to name a few. In this work, we cast the problem of human trajectory forecasting as learning a representation of human social interactions. Early works handcrafted this representation based on domain knowledge. However, social interactions in crowded environments are not only diverse but often subtle. Recently, deep learning methods have outperformed their handcrafted counterparts, as they learned about human-human interactions in a more generic data-driven fashion. In this work, we present an in-depth analysis of existing deep learning based methods for modelling social interactions. Based on our analysis, we propose a simple yet powerful method for effectively capturing these social interactions. To objectively compare the performance of these interaction-based forecasting models, we develop a large scale interaction-centric benchmark TrajNet++, a significant yet missing component in the field of human trajectory forecasting. We propose novel performance metrics that evaluate the ability of a model to output socially acceptable trajectories. Experiments on TrajNet++ validate the need for our proposed metrics, and our method outperforms competitive baselines on both real-world and synthetic datasets.