(1) Are socially-aware human trajectory prediction models really socially-aware?
(2) Does vehicle trajectory prediction work everywhere?
Saeed Saadatnejad*, Mohammadhossein Bahari*, Seyed-Mohsen Moosavi-Dezfooli,
Two papers published in CVPR 2022 and TRC 2022
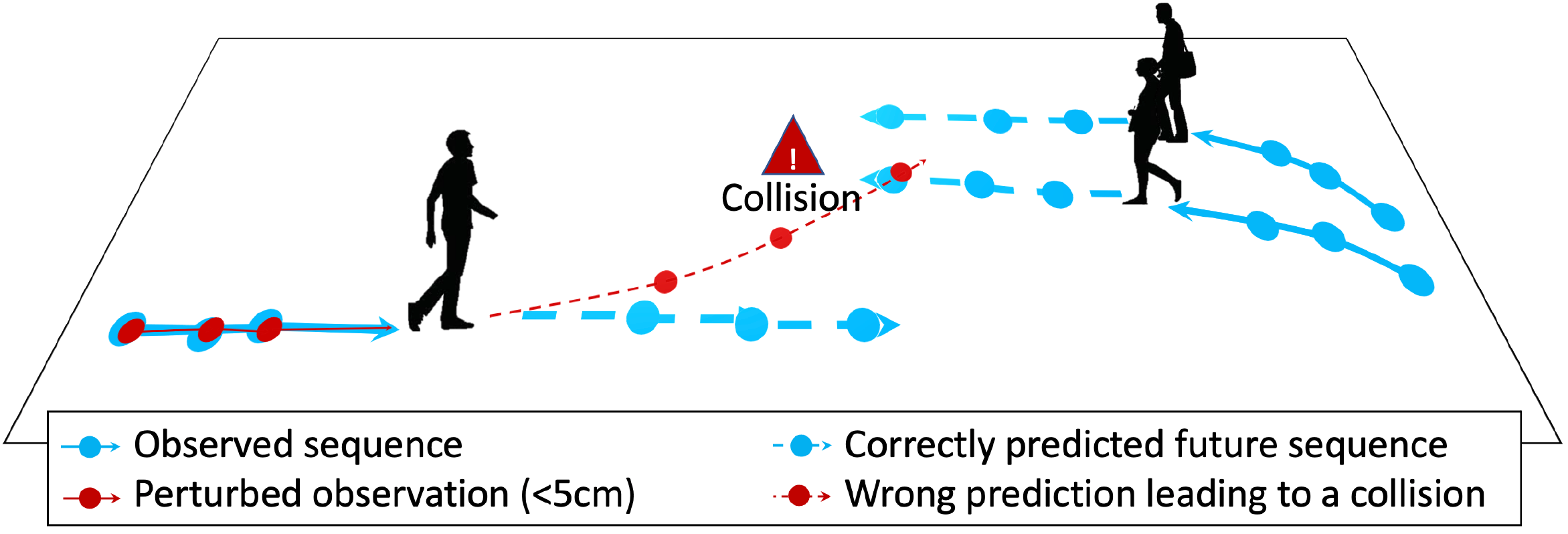
Our field has recently witnessed an arms race of neural network-based trajectory predictors. While these predictors are at the core of many applications such as autonomous navigation or pedestrian flow simulations, their adversarial robustness has not been carefully studied. In this research line, we work on the robustness of trajectory prediction models. Our research led to scene attack and socially-attended attack to assess the scene reasoning and social understanding of prediction models.
We demonstrate the strengths of our method on the recent trajectory prediction models. Finally, we show that our attack can be employed to increase the robustness of state-of-the-art models.
Please visit the webpage for video description, the paper and the source code.