Doctoral School Projects
- Constraint-Compliant Controllable Models
- Composites Engineering Design through Deep Geometric Learning
- Structured 3D Shape Optimization with Part-Based Implicit Neural Representations
Master Thesis or Doctoral School Projects
- Quantizing diffusion models without losing what makes them generate well
- Recovering Thin Structures in 3D Foundation Models
- Applied Deep Learning for Computer Aided Engineering
- Proton Irradiation of Nvidia GPU
- Real-Time 3D Tracking and Anomaly Detection for Maritime Kite Systems
- Archive Retrieval & LLM Readiness (Fribourg Patois)
- Semantic Audio Segmentation for Archive Transcription
- Efficient Diffusion Models via Quantization and Compression
- AI Meets Art History: Generating the Missing Part of the Statue at Lausanne’s Cathedral with 3D Generative Models
- 3D Surface reconstruction using 3D Gaussians and SDF
- Multi-Video Feed Analysis Using Applied Deep Learning: Enhancing Recycling Efficiency through Comparative Object Detection and Classification at Sorting Machine Stations (CVLab x Wasteflow)
- Waste Detection in real-time: Object detection of waste type from the fall of waste in a waste cell (CVLab x Wasteflow)
- Object detection and classification of waste type and mass assessment as it moves along a conveyor belt (CVLab x Wasteflow)
- Stacked objects: counting, segmenting, reconstructing
Semester Projects (Bachelor and Master)
Please note that most of the offered semester projects can be reformulated for a thesis and vice versa. Please contact us directly.
For further project offers, please contact members of the CVLAB directly.
Job Offers
None available at the moment.
Administrative
Semester Projects (Bachelor and Master)
SIN and SSC students do one semester project during their Bachelor studies and one semester project during their Master studies.
Semester projects can be done in groups of two students.
Semester projects are worth 8 credits for Bachelor and 12 credits for Master.
Students must have the approval of the Professor in charge of the laboratory before registering for the given project.
Oral defense: within two weeks of the hand-in date.
Master Thesis Projects
Master Thesis Projects are started once the complete master program is finished and all the credits have been obtained.
Projects for SSC and SIN students should last 4 months at the EPFL or 6 months in the industry or in another University.
Master Thesis Projects must be done individually.
Master Thesis Projects are worth 30 credits.
Students must have the approval of the Professor in charge of the laboratory before registering for the given project.
Additional information
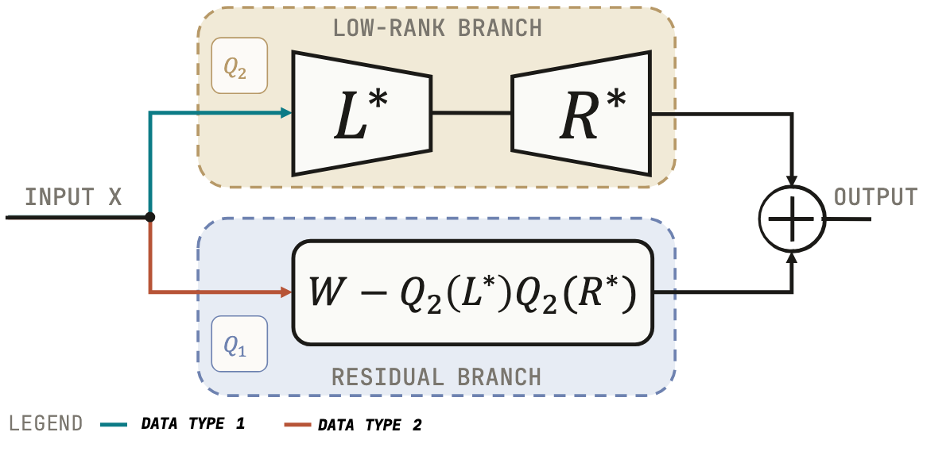
Quantizing diffusion models without losing what makes them generate well
We are seeking a student to develop “LoRAQ v2,” advancing our open-source Low-Rank Approximated Quantization framework for large diffusion transformers. While our current method successfully mitigates the degradation of aggressive low-bit quantization by absorbing errors into a low-rank branch, its optimization objective remains a genuine open question. In this role, you will dismantle and extend (…)
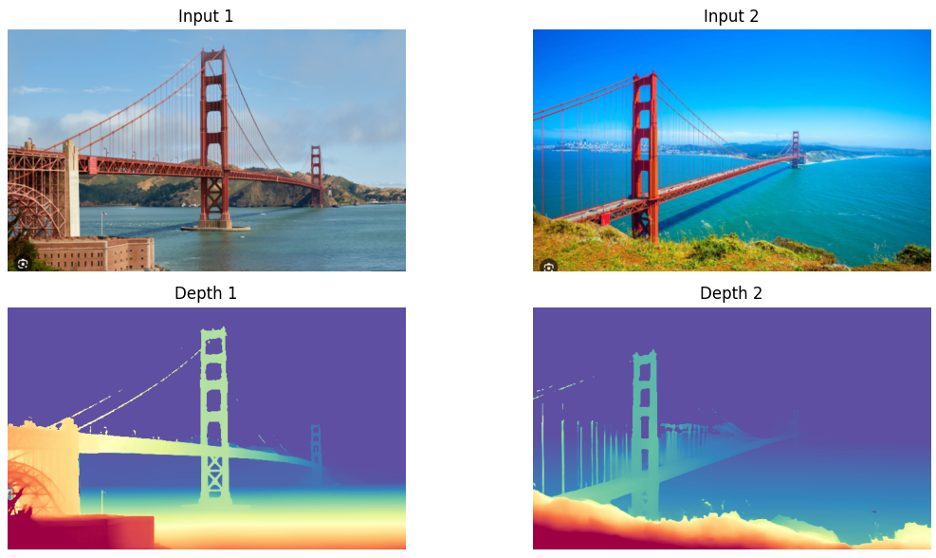
Recovering Thin Structures in 3D Foundation Models
Recently, the task of 3D reconstruction has been revolutionized by the advent of 3D foundation models that predict scene geometry and camera parameters using only a transformer-based feed-forward network. However, transformers are known to be less effective on thin structures, primarily because of the rough patchification. In this project, we will investigate how to improve (…)

Real-Time 3D Tracking and Anomaly Detection for Maritime Kite Systems
At Aether Swiss Kite, we are developing an automated, plug-and-play kite wing system designed to decarbonize the maritime industry. To ensure the system’s safety and reliability, we are implementing a 360° vision- based redundancy system for real-time kite tracking. Building upon a previous semester project that achieved reliable 2D detection, trajectory mapping, and orientation tracking, (…)
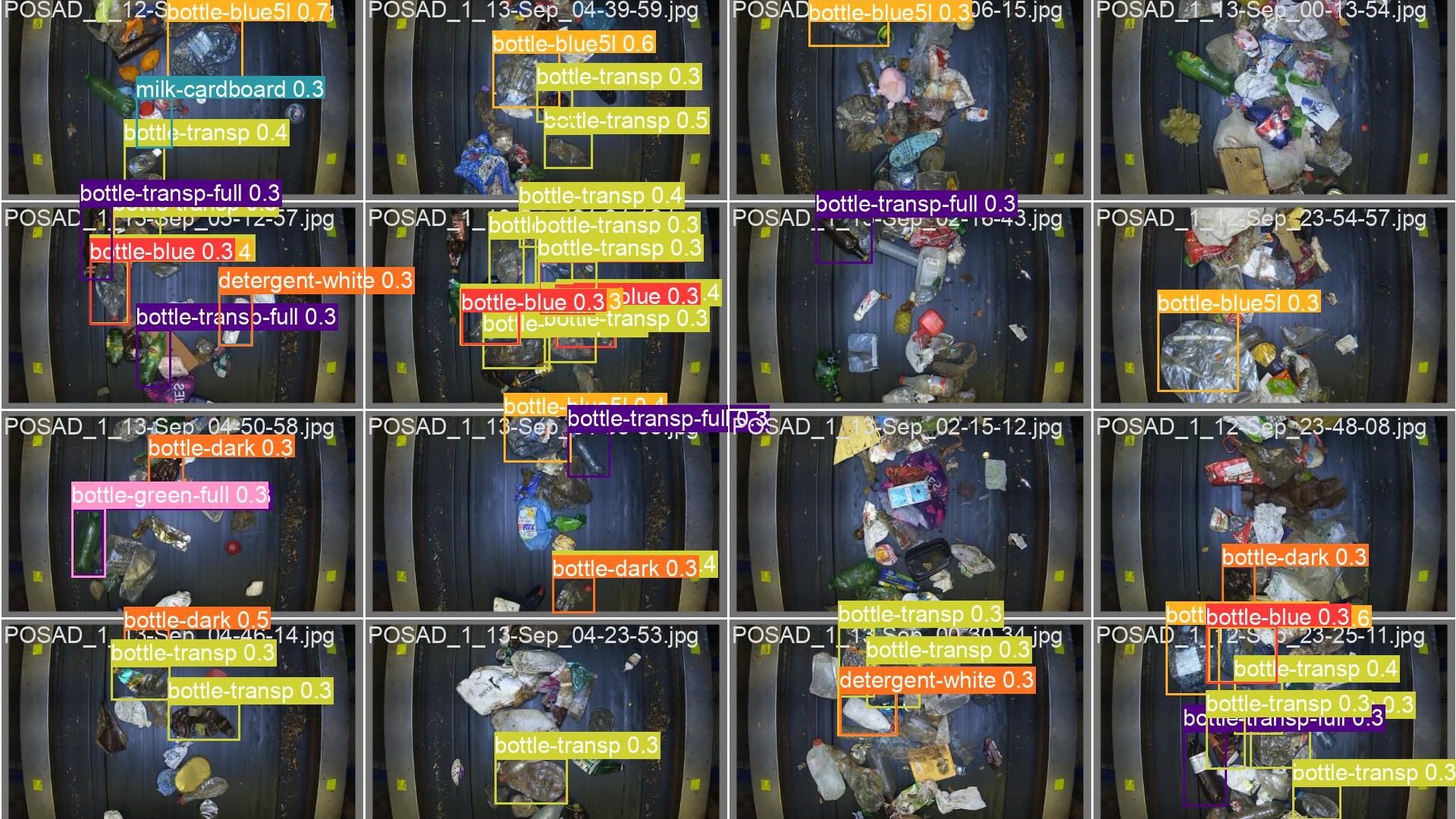
Dynamic Waste Detection in real-time: Object detection and classification of waste type and mass assessment as it moves along a conveyor belt
Through this project, you will be developing a solution for real-world application that will be used in the future within WasteFlow service and will help optimize recycling.
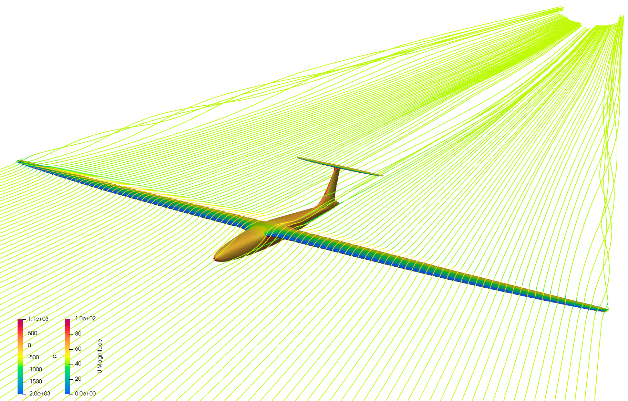
Applied Deep Learning for Computer Aided Engineering
Computer Aided Engineering (CAE) is at the core of modern industrial engineering and manufacturing. However, the current CAE applications suffer from significant time and human resource expenses. Our goal is to leverage deep learning techniques to automate the CAE process and reduce the R&D costs for the industry.
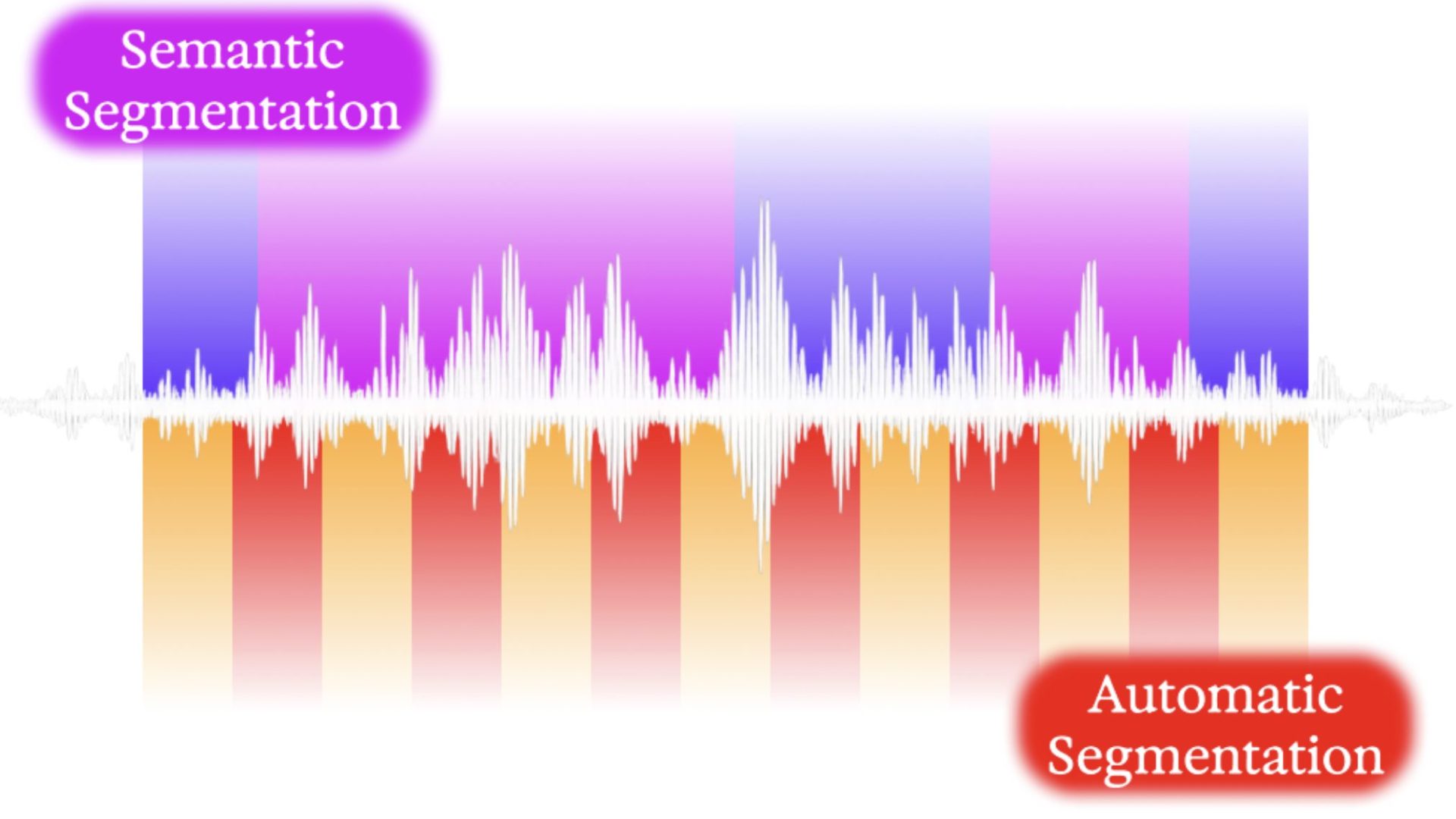
Semantic Audio Segmentation for Archive Transcription
Ahead of its 2026 reopening, the Cantonal University Library of the Canton of Fribourg is partnering with the SDSC and EPFL to transform its digital archives. This project aims to implement semantic audio segmentation, moving away from fixed time intervals to allow for deeper, more coherent exploration of Fribourg’s rich cultural heritage.
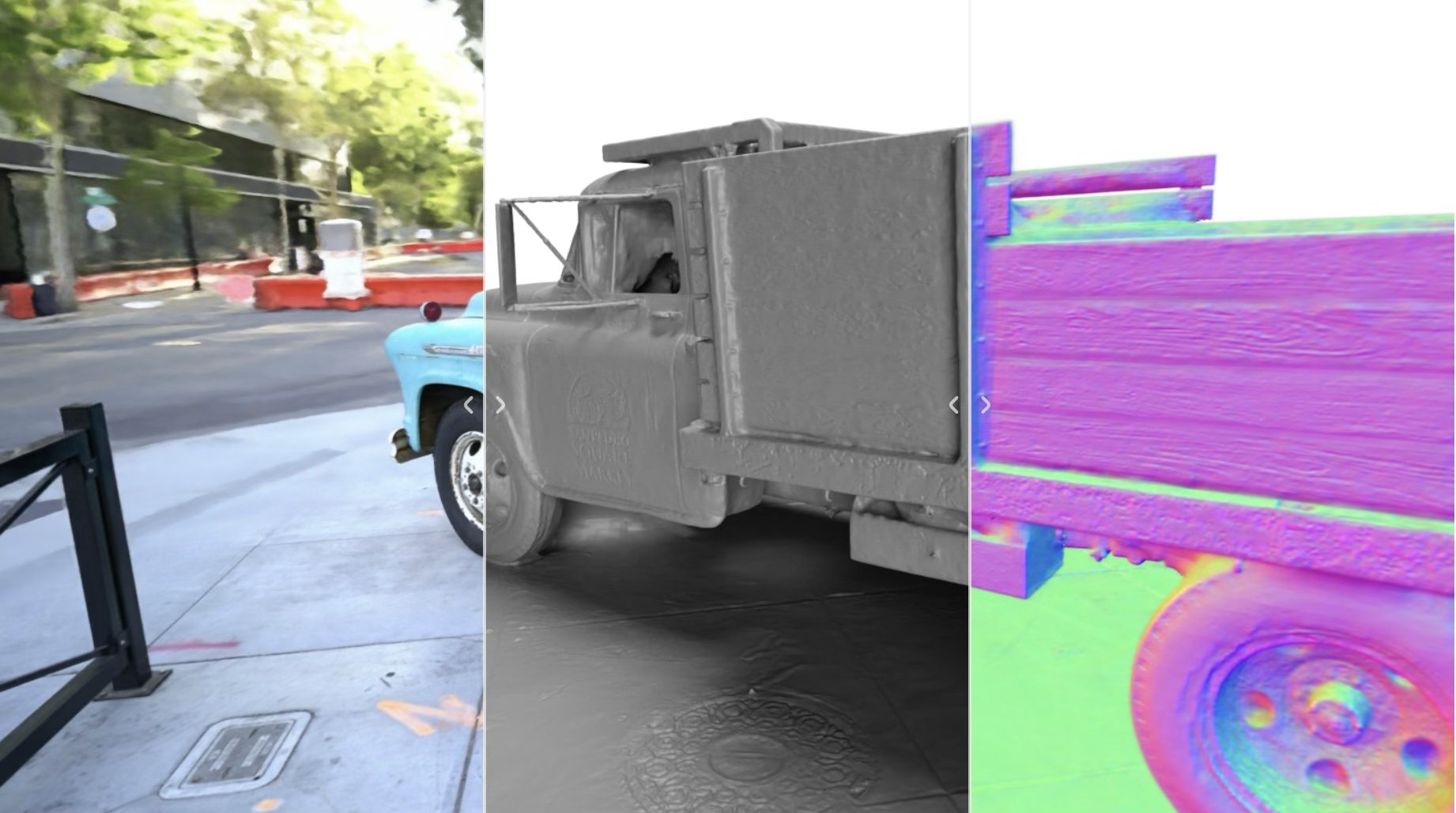
3D Surface reconstruction using 3D Gaussians and SDF
3D Gaussian Splatting, while being primarily a novel view synthesis method, is adapted for 3D surface reconstruction by methods such as SuGaR. Some methods try to reconstruct the surface as an ad-hoc method while some train a traditional neural SDF in conjunction with the 3D Gaussians. In this project, the goal is to try to (…)

Stacked objects: counting, segmenting, reconstructing
In a recently published work [link: https://corentindumery.github.io/projects/stacks.html ], we have developed and released a dataset of stacked objects. It is a particularly challenging setting for many computer vision or robotics tasks, and we would like to take things further and use this dataset in new ways. There are many potential follow-up works that could lead to publications (…)

Efficient Diffusion Models via Quantization and Compression
Diffusion models, such as Stable Diffusion, have achieved state-of-the-art results in generative image synthesis. However, they require hundreds of millions (or even billions) of parameters, making them computationally expensive and memory-heavy. This hinders deployment on resource-constrained devices like mobile phones or edge accelerators. Objective: Explore and systematically evaluate quantization and compression methods tailored for diffusion (…)