
Estimating the relative 6D pose of an object, that is, its 3 rotations and 3 translations with respect to the camera from a single image is crucial in many applications.
Most traditional methods address this problem by first detecting keypoints in the input image, then establishing 3D-to-2D correspondences, and finally running a Perspective-n-Point algorithm. Unfortunately, this often fails in the presence of severe occlusions and cluttered backgrounds.
To improve robustness, we have several end-to-end trainable networks depicted that yield reliable and scale-insensitive 6D poses. These will be tested in harsh spatial conditions in the context of the ClearSpace-1 project, whose chaser satellite will be launched to retrieve and de-orbit a non-operational satellite in 2025.
Software:
https://github.com/cvlab-epfl/wide-depth-range-pose
https://github.com/cvlab-epfl/single-stage-pose
https://github.com/cvlab-epfl/segmentation-driven-pose
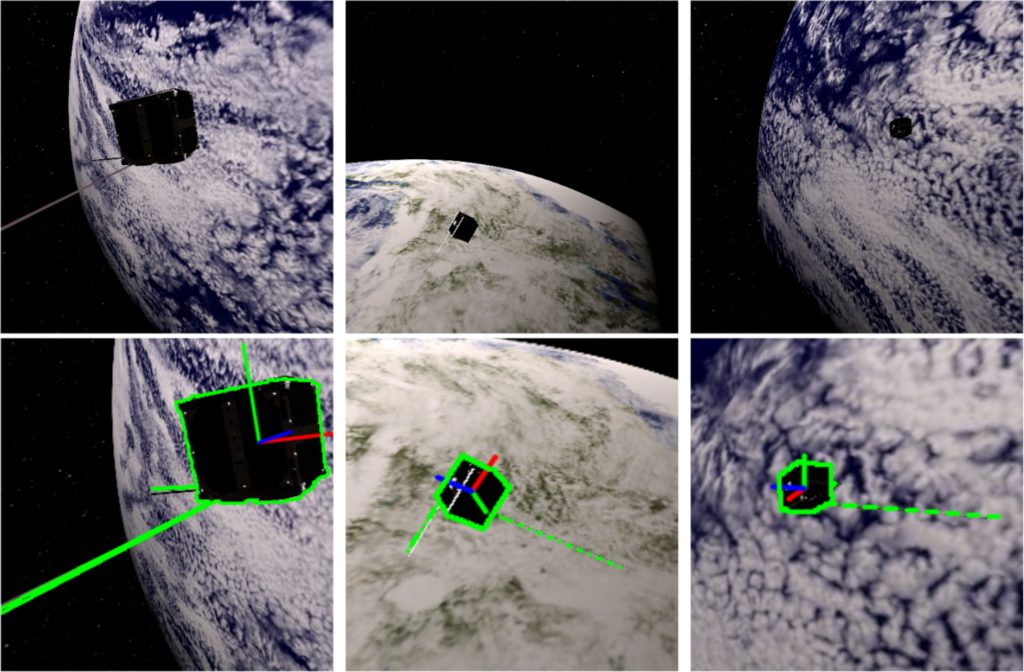
Wide-Depth-Range 6D Object Pose Estimation in Space
Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)
2021-06-25
Conference on Computer Vision and Pattern Recognition (CVPR), Virtual, June 19-25, 2021.p. 15870-15879
DOI : 10.1109/CVPR46437.2021.01561
Single-Stage 6D Object Pose Estimation
2020 Ieee/Cvf Conference On Computer Vision And Pattern Recognition (Cvpr)
2020-06-16
Computer Vision and Pattern Recognition (CVPR), Seattle, Washington, June 16 – 18, 2020.p. 2927-2936
DOI : 10.1109/CVPR42600.2020.00300
Segmentation-driven 6D Object Pose Estimation
2019 Ieee/Cvf Conference On Computer Vision And Pattern Recognition (Cvpr 2019)
2019-06-16
Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, California, USA, June 16-20, 2019.p. 3380-3389
DOI : 10.1109/CVPR.2019.00350