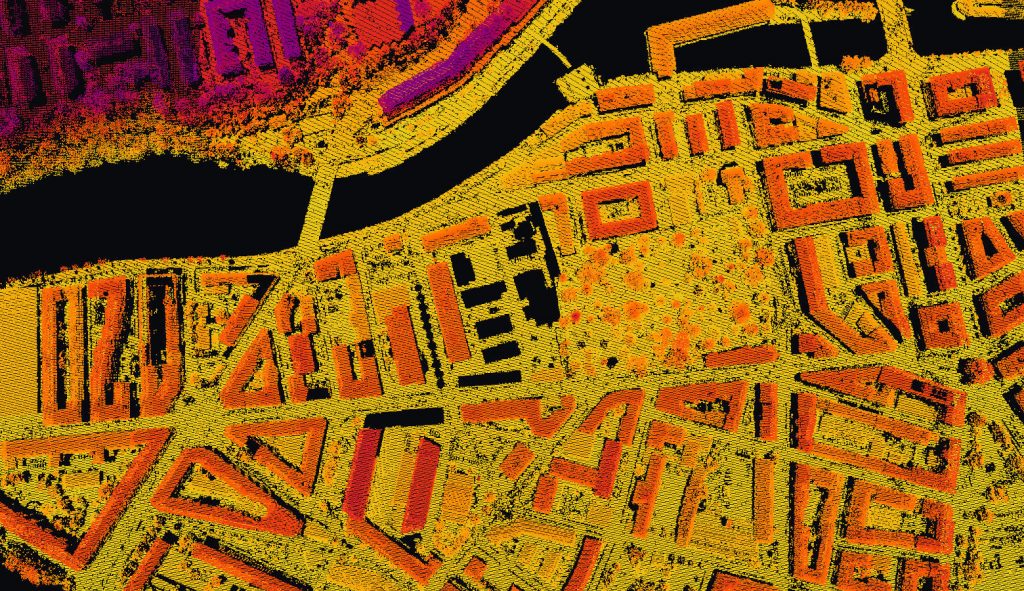
Venice 4D
Using high-resolution aerial images from various online databases, several 3D models of Venice have been computed. Spanning over 20 years, these 3D models keep trace of the evolution of the city in its most recent history. A custom georeferencing tool was developed to approximate the coordinates of the 3D models without GPS or RTKs.
Venice 3D
Different estimations have been done on the resources it would take for digitising the city of Venice itself. Thousands of images have been taken in the districts of San Barnaba and Santa Margherita. Point clouds have been computed from this data and from this basis, different strategies for image acquisition at the scale of the city have been established. Different paths to follow for capturing images by foot were outlined, each one with its level of priority according to the importance of the architectural elements that are nearby.
Louvre 3D
In the context of a collaboration with the Department of the Louvre’s History, a large-scale, high-detail 3D reconstruction of the Museum has been done using open-source softwares for photogrammetry. The goal was to overcome the computational escalation which happens when matching several thousands of images together. A unique 3D model containing more than 30 room was obtained from around 10’000 images.
This project was the Master Thesis of Albane Descombes, supervised by Nils Hamel during Spring 2019.
Point Cloud Segmentation
Born out of a collaboration between the knowledge in image segmentation and 3D modelling, tools have been developed to segment 3D point clouds. Image datasets have been segmented using dhSegment, and this information was propagated using the metadata obtained from 3D modelling libraries. This example shows the segmentation of facades, doors and windows on images taken in Venice.
Eratosthene 4D Server
More information can be found on its specific page.