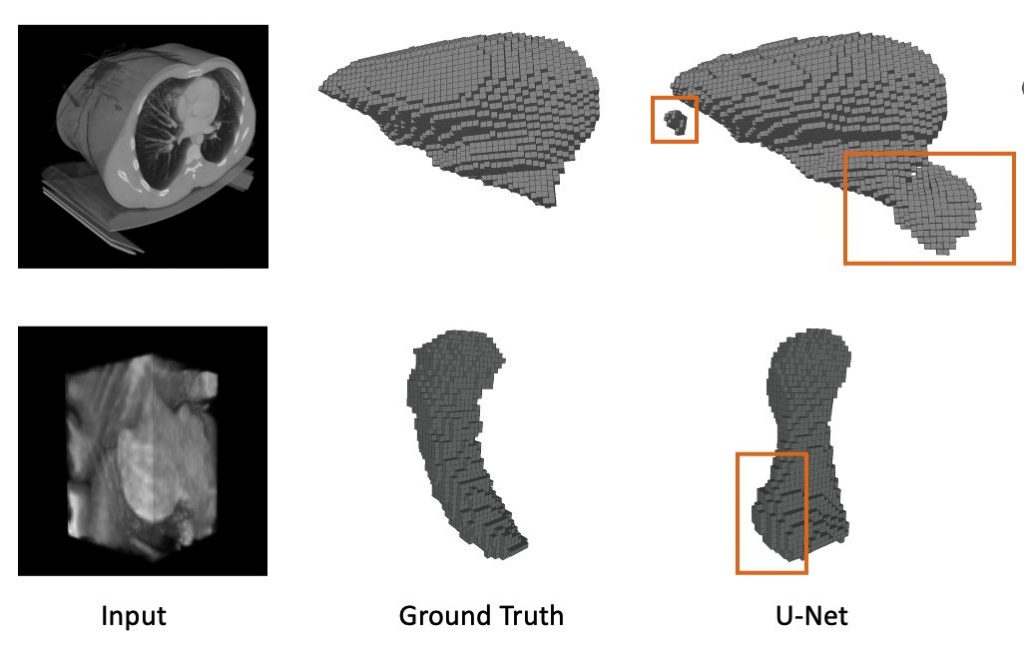
Current state-of-the art volumetric image segmentation approaches achieve impressive performances. But still, they are not 100% correct and make mistakes as you can see in Figure 1. Therefore we would like to know when a network makes a mistake, so that a human or another model can intervene. The area that address this problem is called ‘uncertainty estimation’ and it tries to quantify the confidence in network predictions. (Un)fortunately, two of the most widely used approaches for uncertainty estimations: ensemble of models and dropouts are not quite useful in the volumetric image segmentation setting. This is because, given the increased network training time in volumetric image segmentation, training an ensemble of networks is extremely time consuming. On the other hand, dropouts leads to sub-par performance in CNNs and therefore is less useful in segmentation tasks. Alternatively, test time image augmentation has been used as a technique to estimate uncertainty in image segmentation [1]. In this project we would like to explore this avenue by studying different types of image augmentation techniques we can use to estimate the uncertainty in predictions made by a networks like 3D U-Net[2].
References
[1] G. Wang and T. Vercauteren “Aleatoric uncertainty estimation with test-time augmentation for medical image segmentation with convolutional neural networksn”, Neurocomputing 2019
[2] Ö. Çiçek and O. Ronneberger. “3D U-Net: Learning Dense Volumetric Segmentation from Sparse Annotation”, MICCAI 2016
Application
The candidate should have programming experience, ideally in Python. Previous experience in Pytorch will be a plus.
30% Theory, 30% Implementation, 40% Research and experiments
Contact
For further information, send an e-mail.
Udaranga Wickramasinghe (office BC 304)