Smart Implant for Orthopedics Surgery (nano-tera project)
- Contact person: Kamiar Aminian
- People involved: Arash Arami
- Partners: CHUV, SYMBIOS Orthopédie SA, EPFL – ESPLAB, EPFL – LMIS4, EPFL – SCI – STI – CD
- Funding source:

Overview
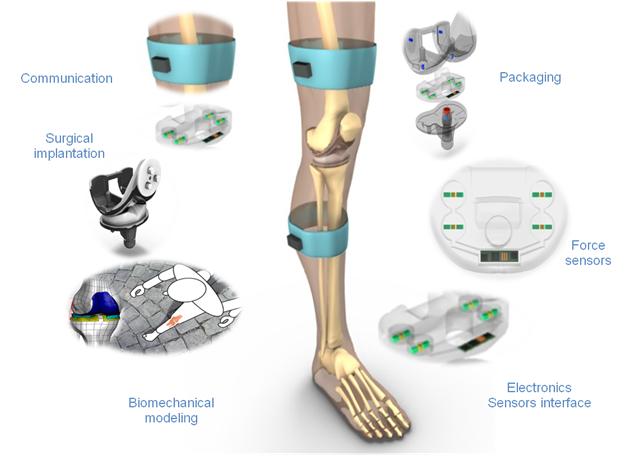
Smart Implant for Orthopedic Surgery (SImOS) is a multidisciplinary project with the aim of developing a prototype system constituted of implanted sensors and electronics, external sensors and electronics and a remote device to measure the knee joint function in the application case of a total joint prosthesis (see illustration).
While our overall objective is to propose systems that can be used with any existing joint prosthesis, this project will focus on a FIRST® knee joint prosthesis designed and produced by the industrial partner which also involved in the project. The prototype will include numerous sensors to quantify the joint function in term of: 3D rotation, forces on the polyethylene insert, friction, wearing of polyethylene, loosening of the tibial prosthesis part and spatiotemporal parameters of gait. To reach these objectives a balance between the implanted module, which should be minimal in size, number of components, power requirement and effect on the prosthesis function, and the external module, which is less constrained, will be found.
Although there are many portable sensor systems available to externally measure the kinematics , all of them suffer from the soft tissue artifact (STA), which dramatically decreases the accuracy and precision of the measurements. In-vivo measurements of kinematic parameters such as joint angle provide STA free information, which can be used not only to improve the measurements, but also to model the STA itself. Consequently, by measuring both kinetic and kinematic parameters of an artificial joint such as prosthetic knee, we can define metrics to evaluate in an objective way the joint function after arthroplasty.
The main role of LMAM in SImOS are:
- Overhead design of kinematics measurement system
- Finding algorithms to precisely estimate the 3D kinematics (using internal or external measurements)
- Finding fusion algorithms to improve the measurements
- Develop a system to detect loosening in the prosthesis (Setup and protocol design and signal processing)
- Processing all the measurements to provid feedback for clinicians and prosthesis designers
Methods
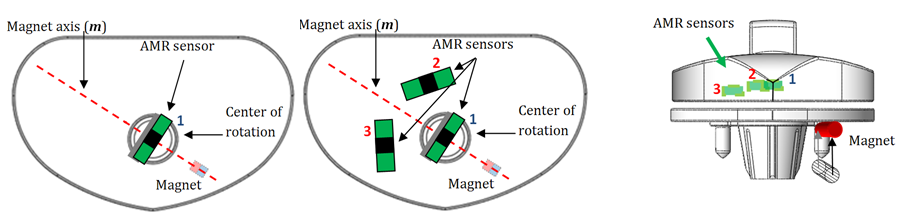
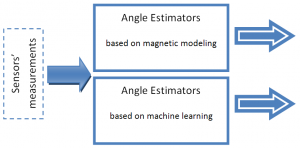
Considering the transparency of the human body to magnetic flux and the negligible effect of CrCo alloy-based prosthesis on magnetic flow, we chose magnetic sensors to estimate joint orientation. Consequently, several sensor configurations were designed and implemented to measure 3D kinematics of the prosthesis. Also different joint angle estimators were designed and used to map the magnetic flux measurements to the relative orientation of the prosthesis’ parts.
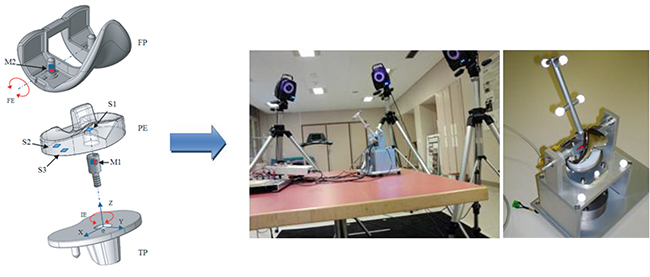
Besides, a manual mechanical simulator of knee was designed and fabricated which is capable to simulate all 3D knee rotational movements and also can emulate and measure the total force of different body weigths on the tibial tray. We also used Infera red motion capture system (Vicon®, UK) as a reference for the internal kinematics measurements.
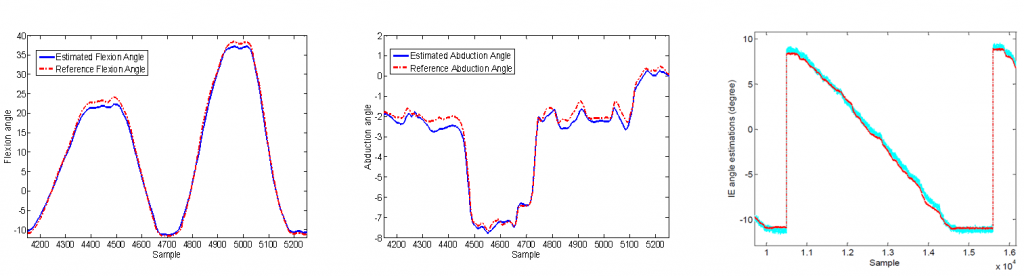
Experimental results show promissing accuracy and precision for all three knee angles.
A new knee simulator was designed to automatically generate the realistic patterns of different activities such as walking on treadmill. This simulator was used to validate the SImOS designed systems in realistic conditions.
Awards:
-
Whitaker–Allard Innovation Award, best paper in 12th Symposium on 3D Analysis of Human Movement (3DAHM 2012), Bologna, Italy.
Publications
Journal Publications:
-
A. Arami, N. Vida Martins, and K. Aminian, “Locally Linear Neuro-Fuzzy Estimate of the Prosthetic Knee Angle and its Validation in a Robotic Simulator” to appear in IEEE Sensors (2015).
-
A. Arami, J. D. Rechenmann, K. Aminian, “Reference-Free Automated Magnetic Sensor Calibration for Angle Estimation in Smart Knee Prostheses,” IEEE Sensors, Vol. 14, Issue 6, pp. 1788-1796 (2014).
- D. Forchelet, M. Simoncini, A. Arami, A. Bertsch, E. Meurville, K. Aminian, P. Ryser, P. Renaud, “Enclosed Electronics System for Force Measurement in Knee Implants,” Sensors, Vol 14, Issue 8, pp. 15009-15021 (2014).
- A. Arami, A. Vallet, K. Aminian, “Accurate Measurement of Concurrent Flexion-Extension and Internal-External Rotations in Smart Knee Prostheses,” IEEE Trans. Biomedical Engineering, Vol. 60, No. 9, pp. 2504-2510 (2013).
- A. Arami, et al., “Instrumented Knee Prosthesis for Force and Kinematics Measurements,” IEEE Trans. Automation Science and Engineering, Vol. 10, No. 3, pp. 615-624 (2013).
- W. Hasenkamp, N. Thevenaz, J. Villard, A. Bertsch, A. Arami, K. Aminian, A. Terrier, P. Renaud, “Design and Test of a MEMS Strain-sensing Device for Monitoring Artificial Knee Implants,” Biomedical Microdevices, Vol. 15, Issue 5, pp. 831-839 (2013).
- A. Arami, J. Miehlbradt, K. Aminian, “Accurate Internal-External rotation measurement in total knee prostheses: a magnetic solution,” Journal of Biomechanics, Vol. 45, Issue 11, pp. 2023-2027 (2012).
Conference Proceedings:
- . Smart Knee Prosthesis for Orthopedic Surgery: the implantable and wearable Measurement System. 25th Congress of the International Society of Biomechanics, Glasgow, UK, 2015.
- A. Arami, K. Aminian, D. Forchelet, P. Renaud, “Implantable and wearable measurement system for smart knee prosthesis,” IEEE Biomed. Circuits and Systems, Lausanne, Switzerland, pp. 240-243 (2014).
- A. Arami, K. Aminian, “Knee prosthesis kinematics estimation through implanted sensors and its validation in a robotic knee simulator,” 13th 3D Analysis of Human Movement Symp., Lausanne, Switzerland (2014).
- A. Arami, A. Barré, R. Berthelin, K. Aminian, “Data Fusion of implantable and wearable sensors for prosthetic knee angle estimation,” 10th Annual Body Sensor Networks (BSN) conference, MIT, Cambridge, MA, US (2013).
- A. Arami, A. Barré, K. Aminian, “Accurate Angle Estimation in Smart Knee Prostheses via Magnetic Implantable and Skin-mounted Sensors”, 24th international society of biomechanics (ISB), Natal, Brazil (2013).
- A. Arami, K. Aminian, “A new method for internal-external rotation measurement in a prosthetic knee”, 12th International Symposium on 3D Analysis of Human Movement, Bologna, Italy (2012).
- A. Arami, H. Dejnabadi, V. Lecrecq, K. Aminian, “An Implantable System for Angles Measurement in Prosthetic Knee”, 23rd international society of biomechanics (ISB), Bruselss, Belgium (2011).
- A. Arami et al. , “Instrumented Prosthesis for Knee Implants Monitoring”, IEEE 7th conference on Automation Science and Engineering (IEEE CASE), Trieste, Italy (2011).