- Contact person: Abolfazl Soltani
- People involved: Abolfazl Soltani, Martin Savary, Joaquin Cabeza de Pablo, Anisoara Ionescu, Hooman Dejnabadi, Mathieu Falbriard
- Partners:
- Funding source: CTI
Overview:
The goal of this project is developing a prototype wrist-watch that is able to detect locomotion periods (walking and running), count the number of steps, and estimate the speed and total distance for both walking and running for healthy and active persons under daily-life conditions.
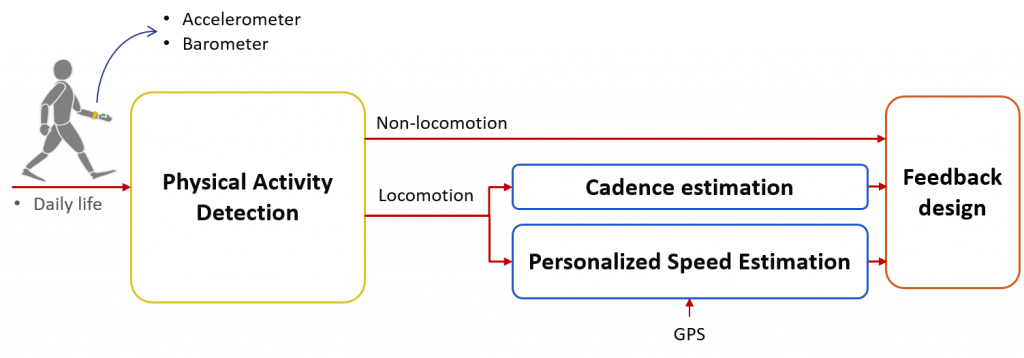
The above figure displays a big picture of the whole system. Acceleration and barometric pressure are captured from a wrist-worn sensor in free-living situations. Then, a wrist-based algorithm decides if recorded data belongs to locomotion (e.g. walking and running) or non-locomotion (e.g. lying, siting, standing) activities. If it is locomotion, we go further to characterize those activities through estimating the gait cadence (Steps / min) and the gait speed. Eventually, the results of such analysis is used to provide meaningful feedbacks to the user to promote a more active lifestyle.
Physical Activity Detection
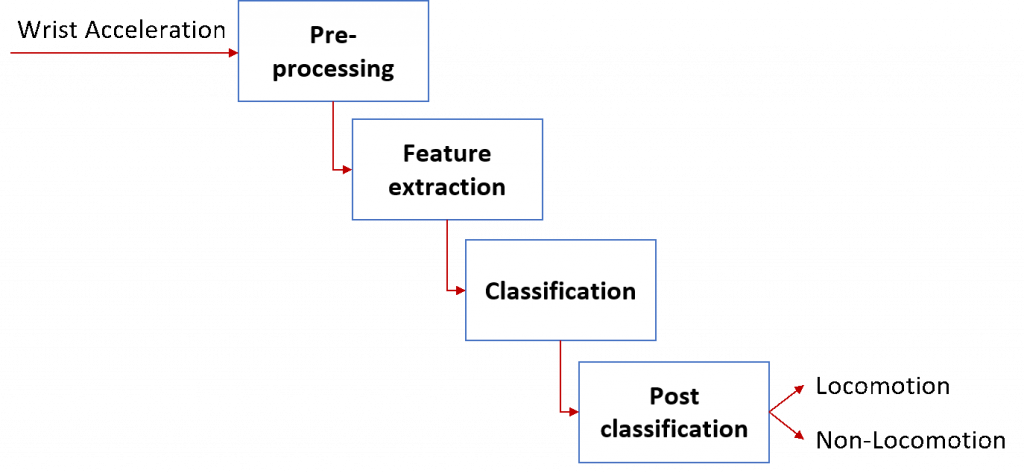
For physical activity detection, first, the raw data is segmented into 6-second windows with 5-second overlap. Then as a pre-processing procedure, a kurtosis analysis will be performed to reduce noise and remove high power impacts on the wrist acceleration. Third, the most relevant features based on intensity, periodicity and noisiness of the acceleration signal along with posture of the hand will be extracted to be used for physical activity detection. Fourth, a naïve Bays classifier, trained on a large population, is used to label each second of activities as locomotion or non-locomotion. Finally, several biomechanical post classification procedures will be applied on the decision of Bays classifier leading to an accurate, reliable, and robust classification of daily physical activities.
The proposed method is validated against a reference algorithm (developed at LMAM) based on shank, thigh and trunk inertial sensors. The proposed method was tested on 30 adult healthy participants using leave-one-out cross-validation. Moreover, the comparison between the proposed method and the reference was done second-by-second. Primary results of the proposed method is shown in the below table.
| Parameter | Sensitivity | Specificity | Accuracy | Precision |
| Median | 88.7 | 98.7 | 97.6 | 89.2 |
| IQR | [79.8 94.3] | [98.0 99.2] | [96.6 98.0] | [85.0 91.2] |
Cadence estimation
After detecting locomotion periods by the proposed activity detector, now, it is time to go further and characterize these periods. To this end, we will estimate the cadence (number of steps per unit time) of locomotion periods based on the method developed at MINOS project.
Gait speed estimation
A better characterization of locomotion periods is to estimate the gait speed, which is one of the most important parameters to characterize people’s daily mobility. It is a primary outcome in ageing and is associated with survival in elderly subjects. Consequently, after cadence estimation, we will estimate the gait speed (walking and running) for locomotion periods under real-life condition.
To this end, for locomotion periods, the acceleration and barometric pressure signals will be segmented into 7-second window with 6-second overlap. Then, several biomechanically meaningful features will be extracted from these two signals to be used to model the gait speed. But, for an accurate speed estimation, two very important points should be mentioned.
First, we figured out that not all people run or walk in a same way. Each person has his own strategy and style to manage his gait speed. While somebody change their step length to change their speed, some others manage their speed through changing the cadence. Moreover, the relation between biomechanical features and the speed varies from one to another person. Below figure demonstrates that when we analyze relation between cadence and step length for two participants separately, the linear correlation is high. However, when we mix data of both, the correlation significantly decreases. Consequently, a general speed model built on a large population is not able to provide accurate estimation of the gait speed.
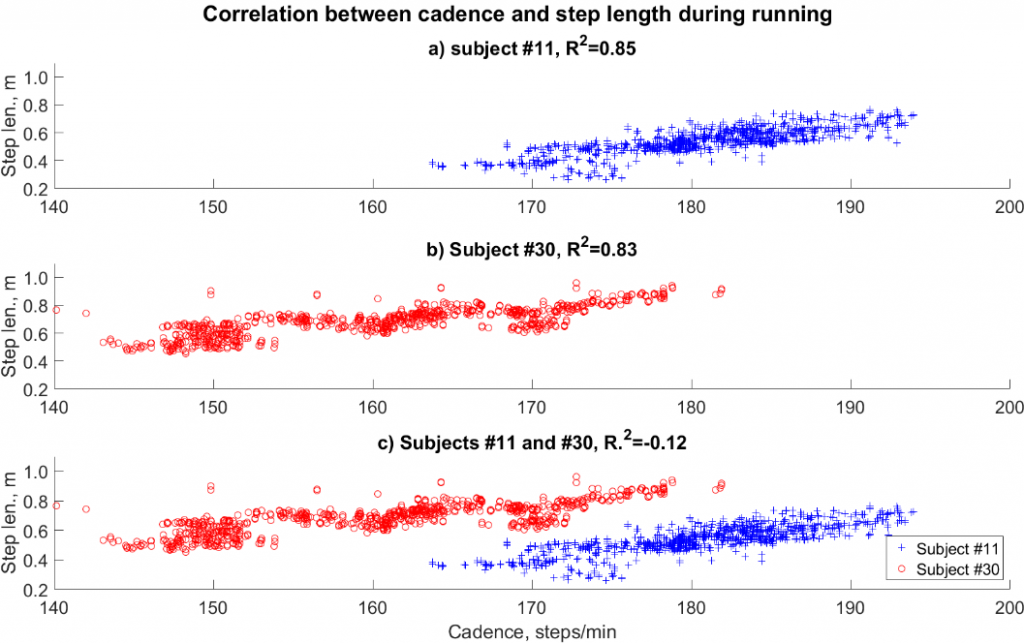
Hence, to obtain accurate and reliable modeling of the gait speed based on wrist acceleration, we developed personalized user-dependent speed model.
The proposed method is validated against GNSS and tested on 30 adult healthy participants for both real-life running and walking under different terrain conditions (uphill, flat, downhill) and various self-adjusted speeds (fast, normal, slow). Figure below displays testing conditions of the proposed method.

The following two tables indicate primary outcomes of the proposed personalized speed estimation method for walking and running. They also compare the results of personalized method with non-personalized version of the method which was tested though leave-one-out cross-validation. To test the personalized method, for each subject, half of data was randomly chosen for training and the other half for testing. GNSS average error during running and walking were 0.15 m/s and 0.10 m/s, respectively.
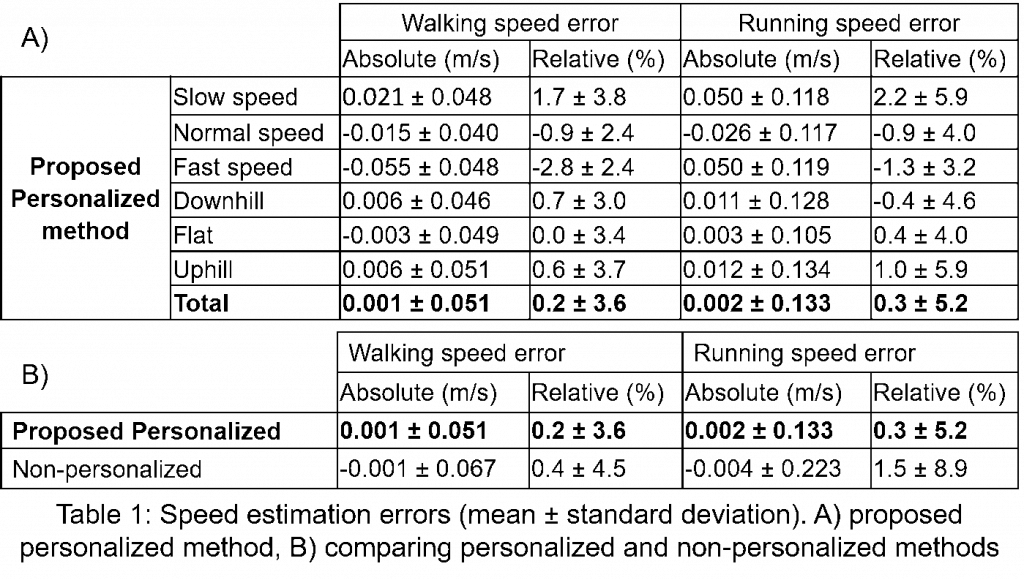
The results show that personalization, even by using few training samples, leads to a great improvement of the performance of the both walking and running speed estimation.