Lab youtube channel:
https://www.youtube.com/@instant-lab4849/videos
Annual Reports (2013 – 2020)
 |
||
| 2019-2020 | ||
 |
 |
 |
| 2018 | 2017 | 2016 |
 |
 |
 |
| 2015 | 2014 | 2013 |
IsoSpring : continuous mechanical time
IsoSpring : film réalisé pour l’exposition Jules Grossmann au Locle par Gasser Media, Mai 2018
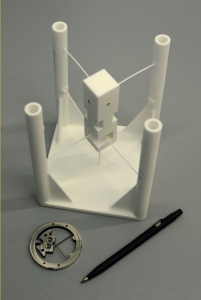
Mechanical timekeeping began in the Middle Ages with the invention of the escapement. After the introduction of oscillators in the 17th century, mechanical clocks and watches continued to rely on this intermittent transmission. The IsoSpring project exploits ideas dating back to Isaac Newton to create a new time base which can be driven without an escapement. Instead, a crank drives the oscillator continuously, without the stop-and-go “ticking” of traditional mechanical clocks and watches. The crank mechanical transmission potentially leads to an increase in efficiency, while the high quality factor of the flexure-based oscillator opens the road for improved chronometric accuracy.
This project is based on a new family of oscillators and maintaining mechanisms patented by the EPFL.
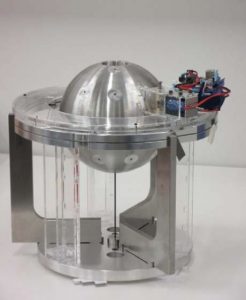
Our first proof of concept in 2013 was followed by more precise time-bases. Our first prototype was built in 2016 and is on permanent display at the Neuchâtel City Hall. A second prototype using a spherical oscillator was exhibited at the International Museum of Horology, La Chaux-de-Fonds, as the showpiece of their exhibit of Neuchâteloise clocks in the Fall of 2017.
An industrial project was established in 2014 and successfully completed in 2017. This was followed up by a second industrial project completed in 2019.
Our current research is focused on miniaturizing to the watch scale.
The IsoSpring’s leaflet is available here.
 |
 |
|
Wattwins oscillator manufactured in silicon. |
Wattwins oscillator in silicon at watch scale. |
 |
 |
| Prototype “Neuchâteloise” clocks with translational oscillator | |
 |
 |
| Prototype “Neuchâteloise” clocks with rotational oscillator | |
 |
| Towards watch scale IsoSpring |
 |
| IsoSpring team at the Neuchâtel City Hall inauguration |
High quality factor oscillators for wrist watches
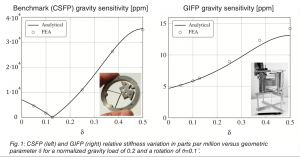
Current mechanical wrist watches have an oscillator consisting of a balance wheel mounted on jewelled bearings and a hair spring. The use of flexure bearings instead of traditional pivots leads to a significant increase in quality factor, i.e., reduced energy loss. As a result, power reserve can be significantly increased and chronometric precision can be improved thanks to reduced oscillator perturbation. However, these new oscillators are sensitive to gravity and have isochronism defects.
A major contribution of this project was the introduction of the concept of isochronism tuning which allows the oscillator to compensate for isochronism defects introduced by factors such as the escapement. This is a significant advance from the previous method of simply minimizing isochronism defect. Moreover, this was achieved while minimizing perturbation due to the orientation of the watch with respect to gravity.
This project was a successful industrial collaboration resulting in a Ph.D. thesis completed in June 2020.
 |
|
| Comparison of state-of-the-art flexure versus Instant-Lab mechanism | |
 |
 |
| Gravity insensitive flexure pivot (GIFP) demonstrators | |
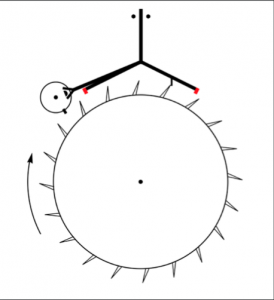
Foucault pendulum properties of oscillators
In 1851, Léon Foucault created a sensation with his pendulum providing a direct demonstration of the turning of the Earth. This simple device consists of a spherical pendulum whose mass is launched in a purely linear orbit. Following Mach’s principle of inertia, the mass will continue to oscillate in the same linear orbit with respect to absolute space. For an observer on the Earth, however, the plane of oscillation will precess. Conceptually speaking, Foucault constructed a very precise demonstrator showing that, when put on a rotating table, linear oscillations of a harmonic isotropic two-degree-of-freedom (2-DOF) oscillator, remain linear with respect to an inertial frame of reference.
This project consists of studying the Foucault property for a variety of 2-DOF oscillators. The first case considered was a spherical oscillator previously used as a time base for a precision clock. We showed the surprising result that the plane of oscillation does not remain constant with respect to absolute space, but follows the rotation table at one half its rotational speed. The analytical computation predicting this behaviour was validated by constructing a physical model, placing it on a rotating table and making accurate measurements. The results were published in Review of Scientific Instruments in 2020.
The Foucault phenomenon is disturbed by parasitic effects which increase as pendulum length decreases. For this reason museum demonstrators are usually more than 7 meters long. We designed an alternative 2-DOF oscillator based on flexures which we believe can display the Foucault phenomenon while small enough to be transportable and placed on a table. The design was presented at the IDETC international conference in August 2020.
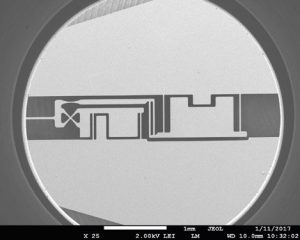
Programmable multistable energy storage mechanisms
This project introduces the concept of programmable multistable mechanism in which the number and position of stable states of a multistable mechanism can be modified. A complete qualitative analysis of a generic multistable mechanism, the T-shaped mechanism, was established using analytical tools based on Euler-Bernoulli beam theory. These results were validated numerically using Finite Element Analysis and experimentally using physical models. Applications include new surgical tools.
This project produced a number of publications including a 2018 Ph.D. thesis in our laboratory. The project is currently a collaboration with the Bertoldi Group, School of Engineering and Applied Sciences, Harvard University.
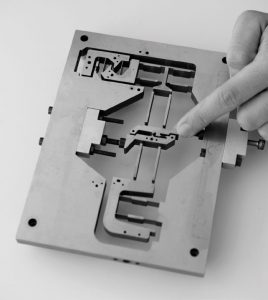 |
| T-shaped multistable mechanism programable to have 1 to 4 stable positions |
 |
 |
 |
 |
 |
|
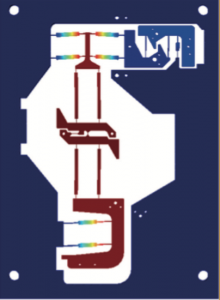
| Stable and unstable states of the T-shaped mechanism | ||
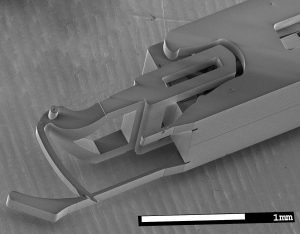
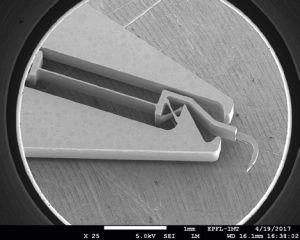
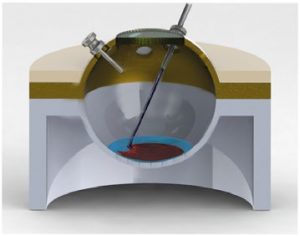
CTI Safe Puncture Optimized Tool (SPOT) for retinal vein cannulation
Retinal Vein Occlusion is a vascular disorder causing severe loss of vision. Retinal vein cannulation and injection of therapeutic agents in the affected vein is a promising treatment but the small size and fragility of retinal veins as well as the surgeon limited hand gesture precision and force perception makes this procedure too delicate for routine operations. The project aims at providing a compliant mechanical tool relying on a new programmable multistable mechanism to safely cannulate veins. This mechanism has the advantage that puncturing stroke and force can be predetermined with puncturing then independent of surgeon manipulation. The feasibility of this project was demonstrated by a prototype made by femto-laser printing, one of the first buckled mechanisms made in glass.
This project is funded by FemtoPrint SA and the Commission for Technology and Innovation CTI (Switzerland) and run in collaboration with Pr. Th. Wolfensberger, Hôpital Ophtalmique Jules-Gonin, Lausanne.
The theory and results of this project were published in a medical journal in 2019.
 |
 |
| Programmable multistable mechanism for retinal vein cannulation | |
 |
 |
| Glass needle for retinal vein puncturing (left) and its bistable mechanism (right) | |
Innotools
This project proposes a change to the MIS and RMIS tool paradigm. The goal is to develop Smart MIS/RMIS tools as stand- alone systems keeping their basic mechanical function (pinching, cutting, puncturing, palpating) while adding sensing functions at the tool-tip (kinesthetic and tactile sensing without trocar perturbation) and embedded mechanical systems (actuating, sampling). InnoTools will collect significant amounts of data which will be analysed in order to improve surgical procedures and develop superior prototypes for surgical planning, surgeon training and surgery assessment. The focus of this project is on ENT surgery and middle-ear measurement and assessment. The Innotools project is financed by a grant from Zeiss (Research IDEAS EPFL Program).
Clic-Clac: force sensing tool for middle-ear surgery
The aim of the project is to design and manufacture a miniature force sensing tool for middle-ear surgery. Currently, surgeons assess the mobility of the ossicle chain manually using conventional elongated hooks through the ear canal, rendering the outcome subjective and imprecise. Applied forces are of order 10 milli-Newtons (mN) therefore difficult to sense manually and requiring extensive surgical experience and skill. Depending on the estimated mobility, one or more ossicles are removed and replaced by miniature prostheses. Our proposed innovation consists of a standard tool where the tip is replaced by a flexible structure that bends at a specified force. The goal is to supply surgeons with a set of hooks having different triggering forces in order to allow them to determine at which force ossicles start moving, thereby providing an objective quantification of ossicle chain mobility. The project is in partnership with SENSOTPIC SA.
SPIRITS: Interactive intelligent robotics and 3D printing for surgery and interventional radiology
The SPIRITS (Simple Printed Interactive Robotics for Interventional Therapy and Surgery) project involves developing a robotic device for image-guided surgery and interventional radiology with a number of innovations, such as a tactile transducer, an intelligent needle, new 3D printing methods and new actuators and robots.
This Interreg project is a collaboration between leading institutions: INSA Strasbourg, Hochschule Furtwangen, University Hospital Mannheim, Fachhochschule Nordwest-schweiz, EPFL.
 |
| SPIRITS team. |
Steerable medical needle for accurate targeting of tissues and lesions : ARC (Aiguille à Raideur Contrôlée)
Surgical and diagnostic procedures such as biopsies are often carried out by means of percutaneous flexible devices such as flexible needles. The effectiveness of such devices depends on the ability to follow a controlled path during insertion inside human tissue. Millimeter-accuracy of the trajectory is crucial as the needle can approach vital organs as it reaches its target. The goal of the ARC project is to create a steerable needle using a passive mechanism. As opposed to the active mechanisms typically used, passive mechanisms rely on the reaction of body tissues to apply the force to produce the required bend of the needle. Our needle is composed of joints that can be stiffened or loosened at the handle, as pressure from tissues during insertion bends the needle to change its direction. Basically, instead of fighting tissue pressure, this pressure is used to correct the needle trajectory. The approach is based on flexure mechanisms.
ARC is a joint INSA Strasbourg – EPFL project, financed by SATT Conectus.
Virtual impulse escapement concept
Instant-Lab introduced virtual impulse escapements in which a double beat escapement becomes a dead beat escapement when the balance wheel is at its operating amplitude. In this way, the advantages of dead beat escapements : direct impulse, greater freedom in choosing impulse position, are preserved, while the disadvantages : sensitivity to shock and difficult self-start, are minimized.
The results of this project were published in the Bulletin de la Société Suisse de Chronométrie, the technical publication of Swiss watchmaking, in 2018.
 |
 |
|
Self-starting functionality of virtual impulse escapement concept. |
Virtual impulse escapement demonstrator. |
I. Vardi; R. A. Bitterli; L. Convert; E. Thalmann; S. Henein
Bulletin de la Société Suisse de Chronométrie. 2018.
Adjustable midsole intervention footwear for patients with medial compartment knee osteoarthritis (ADVANCER, SNSF project)
This project consists of a geometrically adjustable shoe orthotic to balance knee and hip loads which could otherwise lead to cartilage wear and tear, thus avoiding surgical intervention. Our proposed solutions are based on flexible elements combined with stiffness adaptable materials.
This Swiss National Science Foundation project is a collaboration with CHUV (Centre Hospitalier Universitaire Vaudois). Different prototypes were realized. Tests with patients are under CHUV ethical commission evaluation. We are currently examining if the proposed device can be developed into a commercial product. One patent was filed.
 |
| Geometrically adjustable shoe orthotic. |
Biopsy needle
Biopsy needle equipped with force sensor at its extremity allowing for precise navigation through corporal tissue via force sensing tip.
 |
| Biopsy needle tip force sensor |
Load cell with tunable stiffness dedicated to force sensing in nanoprobing applications
Contact detection and quantification between a probe and a sample is essential in nanoprobing applications. It is a must in automation and applications where a stable “probe/sample” contact has to be maintained during long lasting measurements. This project focus on a methodology of designing a flexure-based load cell that can be used with a microrobotic platform in nanoprobing applications. The innovative design (patent filed) will be capable of evaluating various ranges of forces depending on the application scale.
Building 4.0
The project Building 4.0 is conducted in collaboration with Granite Apps ltd. The project consists of navigating a building using beacon (Bluetooth low energy emitters) technology coupled with a dedicated application running on cell phone and taking benefit of the “stream” concept. The use case is Microcity building. The goal is to guide visitors to specific locations, to enhance security aspects and augment building content (e.g. display extended poster contend).
CTI Miniature flexure structures for multi-degree of freedom contact force sensing (VIVOFORCE)
The project developed active surgical tools fitting microsurgery requirements, e.g., eye and brain surgery. Combining flexible structure technology provided by Instant-Lab together with Sensoptic SA’s in-house optical fiber based sensing technology which has been successfully used in heart, ear, nose and throat surgery. Providing surgical instruments that are force sensitive at the tool tip allows precise and reliable
surgical gestures far exceeding current practice. Watchmaking applications are also foreseen.
This project was funded by Sensoptic SA and the Commission for Technology and Innovation CTI (Switzerland) and run in collaboration with Pr. Th. Wolfensberger, Hôpital Ophtalmique Jules-Gonin, Lausanne. The project was completed within budget in November 2016 successfully satisfying the goals set by all partners.
 |
 |
| Retinal surgery with force sensitive peeling hook | |
STI Enable SOLE Project
The object of the SOLE project is to produce ADVANCER prototypes and to test them on CHUV patients. The project is funded by the EPFL STI (School of Engineering) Enable Initiative.
 |
| Adjustable midsole intervention footwear (orthotic) for patients with medial compartment knee osteoarthritis |
Spinal screw placement tool
This Instant-Lab project develops low cost passive alignment tools for spinal pedicle screw placement. The goal is to improve the surgeon’s ability to accurately insert a pedicle screw following a predetermined trajectory. This reduces the risk of plunging which can damage soft tissue, nerves, or the spinal cord.
 |
| Flexure based level indicating tilt angle for pedicle screw placement |
Academic Freedom of the Chair
(Text available in French only)
Liberté académique
La chaire jouit sans restriction de la liberté académique.
« La liberté académique est un héritage intellectuel des anciennes écoles et pensées philosophiques qui ont donné lieu à la fondation des universités […]. Elle a prouvé être au cours des siècles, une condition essentielle pour les fonctions primaires des universités et des institutions éducatives en général, comme la recherche et l’enseignement […]. Cette liberté rend possible l’esprit critique propre aux institutions universitaires à travers leur histoire. Ces institutions ont absolument besoin d’une liberté de façon à pouvoir accomplir leur mission sociale. » [1]
Liberté de dissémination
Les résultats de la chaire sont la propriété de l’EPFL. La chaire a la liberté de les publier dans des revues scientifiques.
« Un aspect important de la liberté académique est, comme le signalait Einstein, la dissémination des connaissances:
“Par liberté académique, j’entends le droit de rechercher la vérité et de publier et enseigner ce que l’on tient pour vrai. Ce droit implique également un devoir : on ne doit dissimuler aucune partie de ce que l’on a reconnu comme vrai. Il est évident que toute restriction de la liberté académique sert à restreinte la dissémination du savoir, ce qui entrave le jugement rationnel et l’action.” [2]
En effet, la diffusion des connaissances est une exigence des fonctions professorales. Lorsque cette diffusion se voit restreinte, cela a des répercussions négatives sur la vie scientifique, ce qui justifie la pertinence de la défense de cette liberté. » [1]
Liberté de collaboration
La chaire a la liberté de collaborer avec d’autres institutions ou des sociétés industrielles. Dans ce cas, des contrats de recherches sont mis en place par l’Office de Transfert de Technologies de l’EPFL avec ces partenaires. Ces contrats définissent, selon les principes établis par l’EPFL, les modalités de transfert de la propriété intellectuelle issue spécifiquement de ces mandats, le droit de publication, ainsi que les éventuelles obligations de confidentialité qui s’appliquent aux informations appartenant aux sociétés industrielles.
La société Patek Philippe SA qui a fait un dont pour soutenir la création de cette chaire a la possibilité d’établir de tels contrats de recherche avec cette dernière, au même titre et aux mêmes conditions que toute autre société industrielle.
La société Patek Philippe SA, n’a de droit de regard, ni sur les contrats établis par la chaire avec des tiers, ni sur les résultats de ces recherches.
Références
[1] Rangel, H. (2007). Le principe de liberté académique dans l’ère du conservatisme et de la globalisation », McGill Journal of Education, vol.42 , n°1.
[2] Rendel, M. (1988). Human rights and academic freedom. Tight, M. (Ed.) Adacemic freedom and responsibility. Guilford, England : Open University Press. (traduction française de la citation par S. Henein)