Description
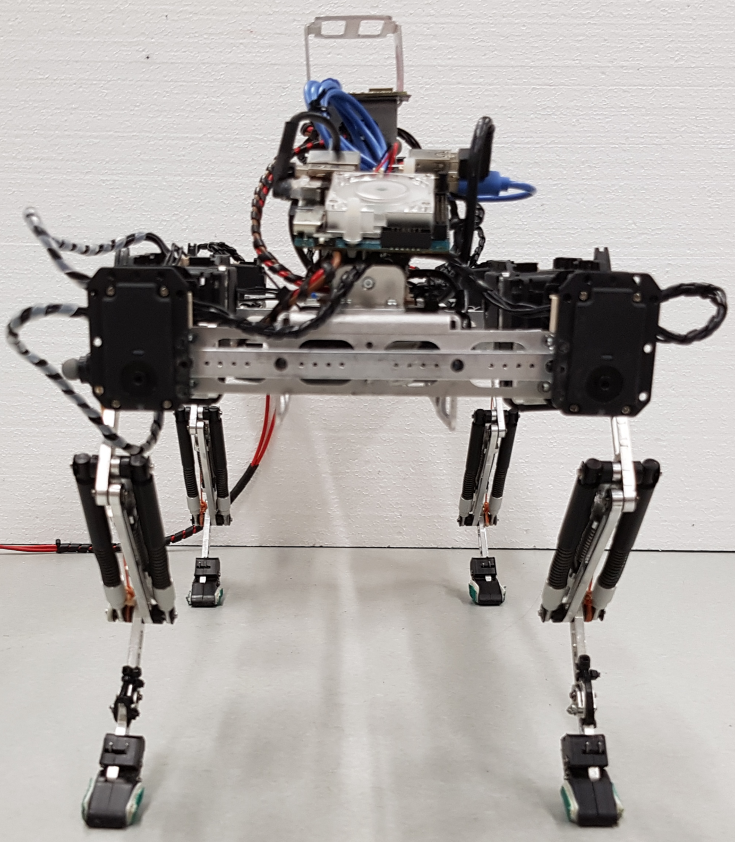
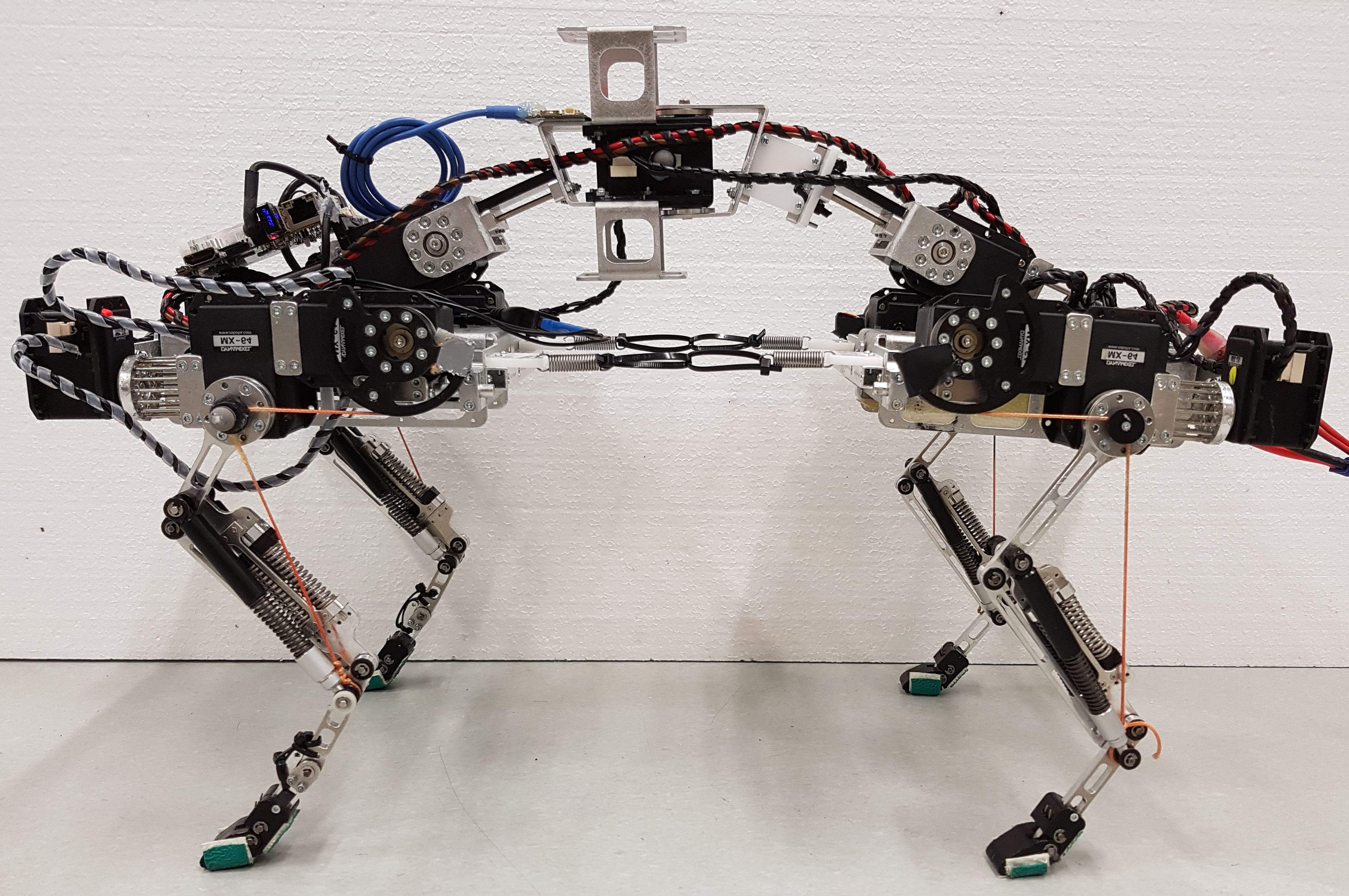
Serval, the last in a line of robot iterations, ismeant to serve as a quadruped for agilemovement. We use the previously researchedmechanisms, control structures and gained knowledge in the electronics development to build a combined and hopefully higher performing robot. Serval consists of an active 3-DOF spine (combining advantages from Lynx and Cheetah-Cub-S), leg units with adduction/abduction mechanism and a scaled ASLP-version of Cheetah-Cub-AL. All motors (DynamixelMX64R and MX28R) are combined with in-series elastics to protect the somewhat sensitive gear-boxes from harmin different load scenarios. The robot is equipped only with a minimal sensor set, consisting of a low-cost, medium-grade IMU. Collaborations started close to the end of this thesis will provide contact and GRF sensing with capacitive sensors as well as a sensitive skin for physical guidance. Control is realized through inverse kinematics for the legs, (for now) offsets in the spine and an underlying CPG-network for pattern generation. Reflexes, like in Oncilla, were not yet implemented, but are ongoing and future work.
Pictures
 |
 |
 |
|
Videos
Related Publications
Towards rich motion skills with the lightweight quadruped robot Serval
Adaptive Behavior. 2020-06-01. Vol. 28, num. 3, p. 129-150. DOI : 10.1177/1059712319853227.Towards Rich Motion Skills with the Lightweight Quadruped Robot Serval – A Design, Control and Experimental Study
2018-07-28. 15th International Conference on Simulation of Adaptive Behavior, SAB 2018, Frankfurt/Main, Germany, August 14-17, 2018. p. 41-55. DOI : 10.1007/978-3-319-97628-0_4.Towards Agility: Definition, Benchmark and Design Considerations for Small, Quadrupedal Robots
Lausanne, EPFL, 2018.Copyright
Feel free to use pictures and movies without prior permission, provided they are credited as follows:Biorobotics Laboratory, EPFL. Please contact us by email at massimo.vespignani at epfl.ch or auke.ijspeert at epfl.ch if you would like additional information or higher resolution videos.