Description
We developed a novel, compliant, quadruped robot as one part of an FP7 European project (AMARSi: Adaptive Modular Architectures for Rich Motor Skills, project start March 2010, project duration 48 months). Goal of the AMARSi project is to improve biological richness of robotic motor skills. The quadruped hardware development is cooperative work together with the Reservoir Laboratory at Ghent University, Netherlands. The AMARSi project has more than 10 project partners.
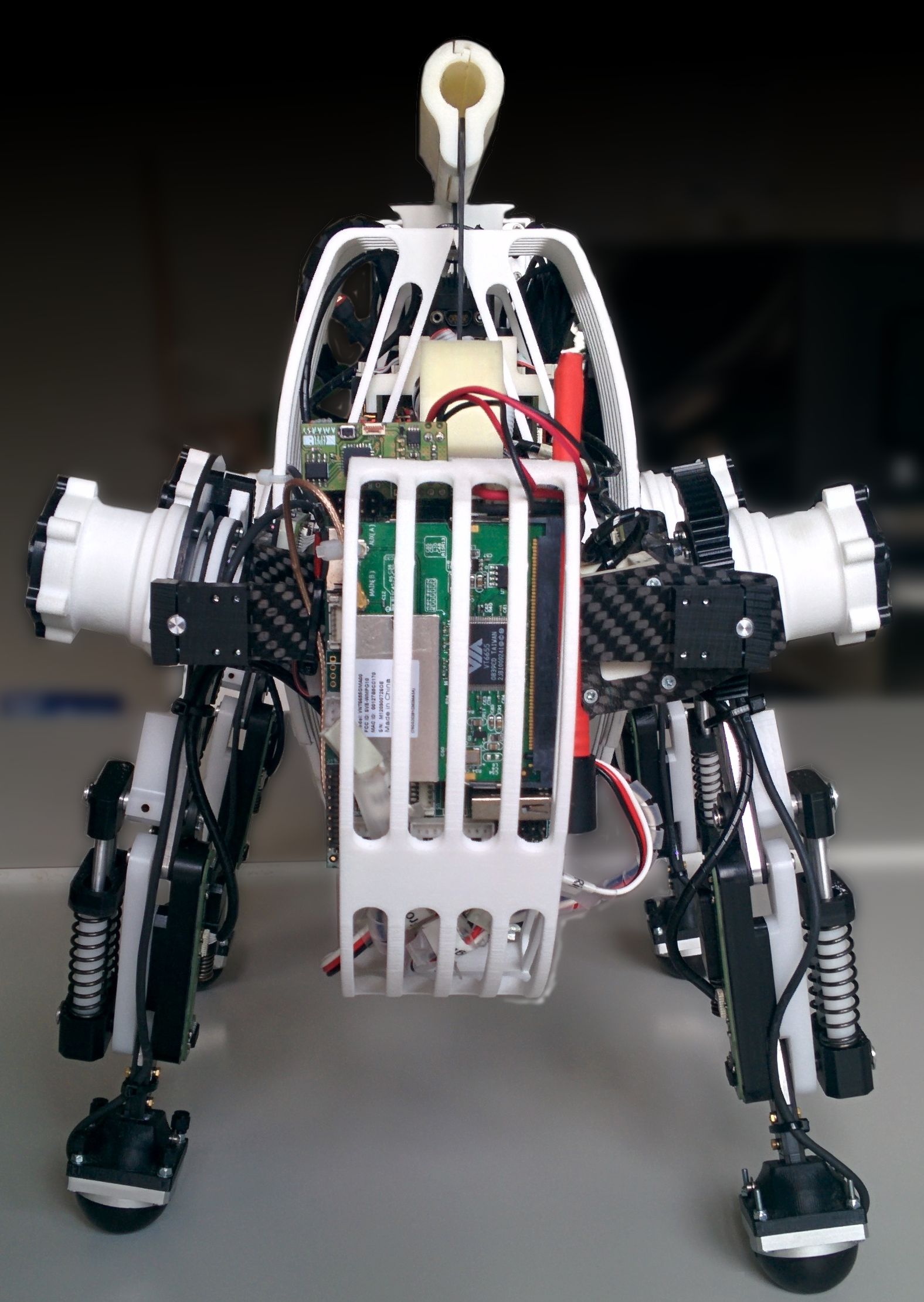
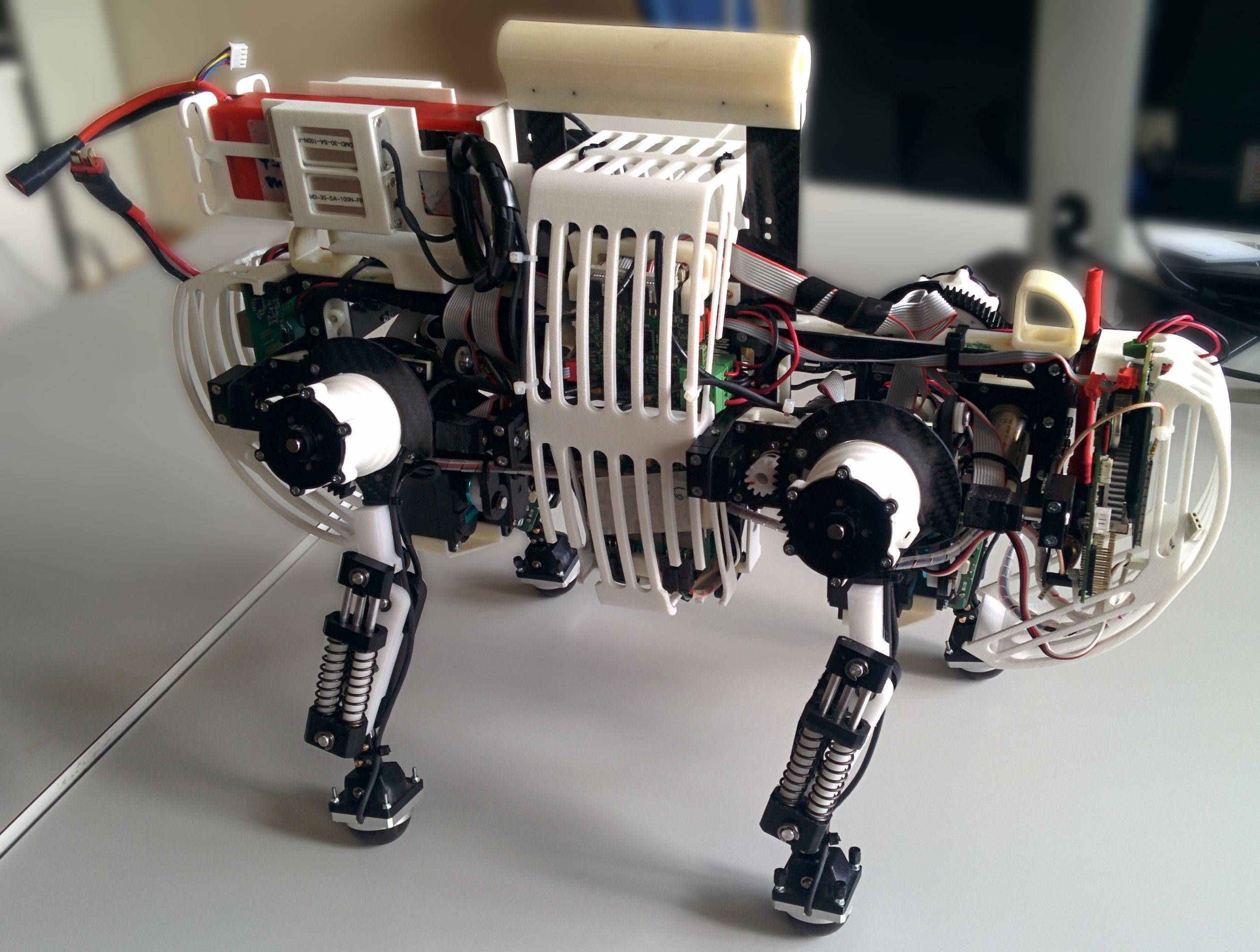
Oncilla is a highly sensorized robot with pantographic legs (ASLP legs) as well as an abduction/adduction (AA) mechanism. The sensorization features encoders on each joint and motor, force and moment sensing at the hips, and IMU as well as new ground contact sensors in the feet (3d force-sensors). The research done with the BIOROB team focuses around closed loop rough terrain locomotion and richer motor behaviors.
Pictures
 |
 |
 |
|
Videos
Related publications
Oncilla Robot: A Versatile Open-Source Quadruped Research Robot With Compliant Pantograph Legs
Frontiers in Robotics and AI. 2018. Vol. 5, p. 67. DOI : 10.3389/frobt.2018.00067.Towards Agility: Definition, Benchmark and Design Considerations for Small, Quadrupedal Robots
Lausanne, EPFL, 2018.Hardware, software and control design considerations towards low-cost compliant quadruped robots
Lausanne, EPFL, 2016.Friction and damping of a compliant foot based on granular jamming for legged robots
2016. 6th IEEE International Conference on Biomedical Robotics and Biomechatronics (BioRob), SINGAPORE, JUN 26-29, 2016. p. 1160-1165. DOI : 10.1109/BIOROB.2016.7523788.Rich Locomotion Skills with the Oncilla Robot
Dynamic Walking 2014, Zurich, Switzerland, June 10-13, 2014.Modular Control of Limit Cycle Locomotion over Unperceived Rough Terrain
2013. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Tokyo, Japan, November 3-8, 2013. p. 3390-3397. DOI : 10.1109/IROS.2013.6696839.Towards Modular Control for Moderately Fast Locomotion over Unperceived Rough Terrain
Dynamic Walking 2013, Carnegie Mellon University, Pittsburgh, USA, JUNE 10-13, 2013.Oncilla robot: a light-weight bio-inspired quadruped robot for fast locomotion in rough terrain
2011. 5th International Symposium on Adaptive Motion of Animals and Machines, Awaji, Japan, October 11-14, 2011.Copyright
Feel free to use pictures and movies without prior permission, provided they are credited as follows:Biorobotics Laboratory, EPFL and Reservoir Laboratory, University of Ghent. Please contact us by email at massimo.vespignani at epfl.ch or auke.ijspeert at epfl.ch if you would like additional information or higher resolution videos.