Our research develops and uses robotic devices that interact with animal groups to observe and modulate their behaviour, in order to better understand them, e.g. their collective decision making.
This work has goals in behavioural sciences, collective dynamics and systems modelling; and employs tools and techniques from mobile robotics, microengineering, machine learning, computer vision, and complex systems.



Honeybees and robots
|
|
 |
 |

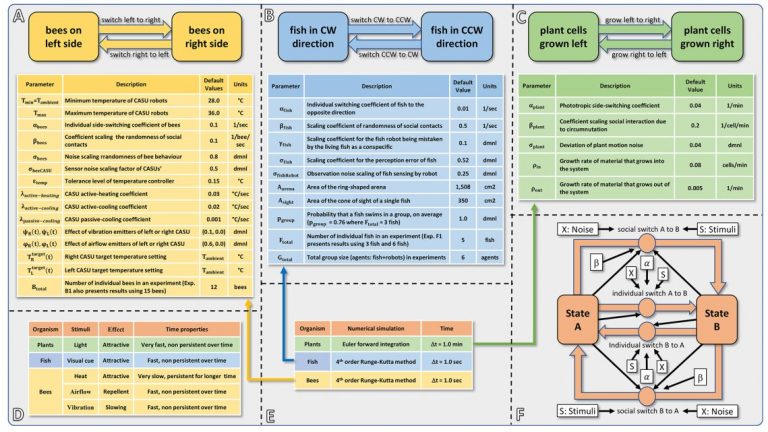
We are developing robotic devices that live inside beehives and continually interact with entire honeybee colonies. The robots modulate the internal hive environment with vibrations and heat; these are used to explore how behaviours can be steered at individual and colony levels (Ilgun et al, 2021). We have recently demonstrated the capacity of our robotic system to interact with an intact winter cluster, comprising thousands of animals (Barmak et al, 2023; see also our press release). This research is part of the FET-EU project HIVEOPOLIS, in which we also contribute to core systems (e.g., Komasilovs et al, 2024) and educational activities. Overall a main aim is to better understand how our long-term live-in robotics (Barmak et al, 2024) can support honeybees in an increasingly hostile environment for these crucial pollinators.
Our previous work studied collective behaviours in honeybee-robot interactions in laboratory conditions (Schmickl et al 2021, Halloy et al 2013, Zahadat et al 2014), investigating how reactive thermal environments influence decision-making.
Fish and robots
 |
 |
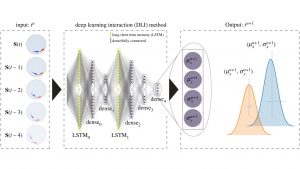 |
We are developing systems comprising of multiple mobile robots interacting with small groups of fish such as zebrafish (Danio rerio) and rummy-nose tetra (Hemigramus rhodostomus). The robotic agents (Bonnet et al 2017, Bonnet et al 2016, Papaspyros et al 2019, Papaspyros et al, 2023) were controlled via a closed-loop system using computer vision analysis (Bonnet et al 2017), and have been shown to be capable of integrating into groups of fish (Bonnet et al 2018) and modulating collective decisions (Bonnet et al 2018, Chemtob et al 2020). More generally, we work on modelling the dynamics of fish (Escodebo et al 2020), so to design robotic interactions with increased bio-acceptance (Papaspyros et al 2019). Most recently we have shown that deep learning models of fish social interactions are competitive with analytical approaches (Papaspyros et al, 2024) as well as being generalisable.
Interspecies interactions mediated by bio-hybrid robots
Our research within the FET-EU project ASSISIbf included the
breakthrough of developing inter-species interactions between
honeybees and zebrafish, mediated via robots (Bonnet et al, 2019).
Our press release includes a further summary of this research:
Animals and robots – other research
 |
 |
|
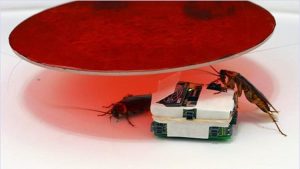
- The LEURRE project constructed the first robots that were shown to infiltrate an animal group – being accepted like conspecifics – and, through acting as “agent provocateur”, were able to modulate group decisions from within. (Halloy et al 2007). Here, our robots interacted with cockroaches.
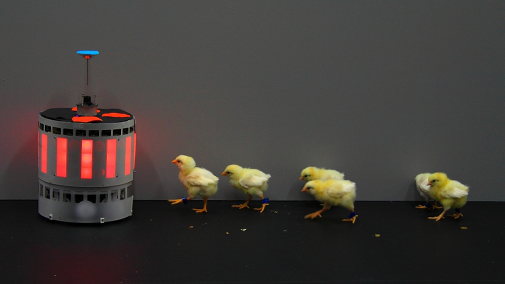
- We developed mobile robots that interacted with domestic chickens, (Gribovskiy et al 2018, 2008, 2012). This system made use of visual and auditory channels for both observation (animals ⇒ robots) and modulation (robots ⇒ animals).
- Across all animal-robot interaction studies, the robotic devices must be capable of transmitting cues or signals that are relevant to the animal, of sensing the animal’s response to the presented information, and finally of reacting to it. The design of such animal-interacting robots is highly non-trivial, depending on understanding the animals, modelling, robot design, and embodiment. We developed a general methodology to address these interconnected challenges (Mondada et al 2013).
Related publications
2026
Journal Articles
Defective RNA Polymerase III sensing of mitochondrial DNA in pulmonary epithelial cells impairs type I IFN immunity to SARS-CoV-2
Proceedings of the National Academy of Sciences of the United States of America
2026
Vol. 123 , num. 12.DOI : 10.1073/pnas.2522111123
2025
Conference Papers
Extending Sensory Capabilities of a Biohybrid System: Prediction of Honeycomb Fill
2024 12th International Conference on Control, Mechatronics and Automation (ICCMA)
2025
12th International Conference on Control, Mechatronics and Automation, London, UK, 2024-11-11 – 2024-11-13.p. 142 – 147
DOI : 10.1109/ICCMA63715.2024.10843927
2024
Journal Articles
Predicting the long-term collective behaviour of fish pairs with deep learning
Journal of The Royal Society Interface
2024
Vol. 21 , num. 212.DOI : 10.1098/rsif.2023.0630
Architecture of a decentralised decision support system for futuristic beehives
Biosystems Engineering
2024
Vol. 240 , p. 56 – 61.DOI : 10.1016/j.biosystemseng.2024.02.017
Quantifying the biomimicry gap in biohybrid robot-fish pairs
Bioinspiration & Biomimetics
2024
Vol. 19 , num. 4, p. 046020.DOI : 10.1088/1748-3190/ad577a
2023
Journal Articles
A biohybrid interaction framework for the integration of robots in animal societies
IEEE Access
2023
p. 1 – 1.DOI : 10.1109/ACCESS.2023.3290960
A robotic honeycomb for interaction with a honeybee colony
Science Robotics
2023
Vol. 8 , num. 76.DOI : 10.1126/scirobotics.add7385
Conference Papers
Optimising Redundancy in Distributed Sensor Networks
SAC ’23: Proceedings of the 38th ACM/SIGAPP Symposium on Applied Computing
2023
38th ACM/SIGAPP Symposium on Applied Computing, Tallinn, Estonia, March 27-31, 2023.p. 783 – 786
DOI : 10.1145/3555776.3577797
Theses
Challenges and approaches in bridging the biomimicry gap in biohybrid systems of fish and robots
Lausanne: EPFL2023
p. 246.DOI : 10.5075/epfl-thesis-9728
2022
Journal Articles
The role of feedback and guidance as intervention methods to foster computational thinking in educational robotics learning activities for primary school
Computers & Education
2022
Vol. 180 , p. 104431.DOI : 10.1016/j.compedu.2022.104431
Conference Papers
A study model for reconstructing urban ecological niches
Structures and Architecture A Viable Urban Perspective?
2022
Fifth International Conference on Structures and Architecture (ICSA2022), Aalborg, Denmark, July 6–8, 2022.p. 75 – 82
2021
Journal Articles
Social Integrating Robots Suggest Mitigation Strategies for Ecosystem Decay
Frontiers in Bioengineering and Biotechnology
2021
Vol. 9 , p. 612605.DOI : 10.3389/fbioe.2021.612605
Conference Papers
Exploring a Handwriting Programming Language for Educational Robots
Robotics in Education
2021
12th International Conference on Robotics in Education (Rie 2021), Bratislava, Slovakia, April 28-30, 2021.p. 268 – 275
DOI : 10.1007/978-3-030-82544-7_25
Bio-Hybrid Systems for Ecosystem Level Effects
ALIFE 2021: The 2021 Conference on Artificial Life
2021
The 2021 Conference on Artificial Life, July 19–23, 2021.DOI : 10.1162/isal_a_00396
Reviews
Guidelines for the use and interpretation of assays for monitoring autophagy (4th edition)
Autophagy
2021
Vol. 17 , num. 1, p. 1 – 382.DOI : 10.1080/15548627.2020.1797280
2020
Journal Articles
Strategies to modulate zebrafish collective dynamics with a closed-loop biomimetic robotic system
Bioinspiration & Biomimetics
2020
Vol. 15 , num. 4, p. 046004.DOI : 10.1088/1748-3190/ab8706
2019
Journal Articles
Bidirectional interactions facilitate the integration of a robot into a shoal of zebrafish Danio rerio
PLoS One
2019
Vol. 14 , num. 8, p. e0220559.DOI : 10.1371/journal.pone.0220559
Combinations of single-top-quark production cross-section measurements and |f$_{LV}$V$_{tb}$| determinations at $ \sqrt{s} $ = 7 and 8 TeV with the ATLAS and CMS experiments
Journal of High Energy Physics
2019
p. 88.DOI : 10.1007/JHEP05(2019)088
Robots mediating interactions between animals for interspecies collective behaviors
Science Robotics
2019
Vol. 4 , num. 28, p. eaau7897.DOI : 10.1126/scirobotics.aau7897
LSST: From Science Drivers to Reference Design and Anticipated Data Products
The Astrophysical Journal
2019
Vol. 873 , num. 2, p. 111.DOI : 10.3847/1538-4357/ab042c
Books
Shoaling with Fish: Using Miniature Robotic Agents to Close the Interaction Loop with Groups of Zebrafish Danio rerio
Springer, 2019.DOI : 10.1007/978-3-030-16781-3
Patents
Device and method for sorting biological entities
Patent number(s) :
- ES2914362 (T3)
- EP3717889 (B1)
- US11099118 (B2)
- US2021072142 (A1)
- EP3717889 (A1)
- WO2019102422 (A1)
2019
2018
Journal Articles
How mimetic should a robotic fish be to socially integrate into zebrafish groups ?
Bioinspiration & Biomimetics
2018
Vol. 13 , num. 2, p. 025001.DOI : 10.1088/1748-3190/aa8f6a
Closed-loop interactions between a shoal of zebrafish and a group of robotic fish in a circular corridor
Swarm Intelligence
2018
Vol. 12 , num. 3, p. 227 – 244.DOI : 10.1007/s11721-017-0153-6
Conference Papers
Follow the dummy: measuring the influence of a biomimetic robotic fish-lure on the collective decisions of a zebrafish shoal inside a circular corridor
Proceedings of the first IEEE-RAS International Conference on Soft Robotics (Robosoft 2018)
2018
Robosoft 2018: The first IEEE-RAS International Conference on Soft Robotics, Livorno, Italy, April 24-28, 2018.p. 504 – 509
DOI : 10.1109/ROBOSOFT.2018.8405376
How to Blend a Robot Within a Group of Zebrafish: Achieving Social Acceptance Through Real-Time Calibration of a Multi-level Behavioural Model
Biomimetic And Biohybrid Systems
2018
7th International Conference on Biomimetic and Biohybrid Systems, Living Machines (LM), Paris, FRANCE, Jul 17-20, 2018.p. 73 – 84
DOI : 10.1007/978-3-319-95972-6_9
2017
Journal Articles
Design of a modular robotic system that mimics small fish locomotion and body movements for ethological studies
International Journal of Advanced Robotic Systems
2017
Vol. 14 , num. 3, p. 1729881417706628.DOI : 10.1177/1729881417706628
Conference Papers
Multi-robot control and tracking framework for bio-hybrid systems with closed-loop interaction
2017
Robotics and Automation (ICRA), 2017 IEEE International Conference on, Singapore, Singapore, 29 May-3 June 2017.DOI : 10.1109/ICRA.2017.7989515
Automated Calibration of a Biomimetic Space-Dependent Model for Zebrafish and Robot Collective Behaviour in a Structured Environment
Living Machines 2017: Biomimetic and Biohybrid Systems
2017
Living Machines 2017, Stanford University, July 25-28, 2017.p. 107 – 118
DOI : 10.1007/978-3-319-63537-8_10
Theses
Shoaling with fish: using miniature robotic agents to close the interaction loop with groups of zebrafish Danio rerio
Lausanne: EPFL2017
p. 201.DOI : 10.5075/epfl-thesis-7577
2016
Journal Articles
Measurements of the Higgs boson production and decay rates and constraints on its couplings from a combined ATLAS and CMS analysis of the LHC pp collision data at $ \sqrt{s}=7 $ and 8 TeV
Journal of High Energy Physics
2016
Vol. 2016 , num. 8, p. 45.DOI : 10.1007/JHEP08(2016)045
Guidelines for the use and interpretation of assays for monitoring autophagy (3rd edition)
Autophagy
2016
Vol. 12 , num. 1, p. 1 – 222.DOI : 10.1080/15548627.2015.1100356
Conference Papers
Design Methods for Miniature Underwater Soft Robots
Proceedings of the 6th IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics (BioRob 2016)
2016
6th IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics (BioRob 2016), Singapore, June 26-29, 2016.p. 1365 – 1370
DOI : 10.1109/BIOROB.2016.7523823
2015
Journal Articles
Sustained impact of drought on wet shrublands mediated by soil physical changes
Biogeochemistry
2015
Vol. 122 , num. 2-3, p. 151 – 163.DOI : 10.1007/s10533-014-0059-y
Conference Papers
Infiltrating the Zebrafish Swarm: Design, Implementation and Experimental Tests of a Miniature Robotic Fish Lure for Fish-Robot Interaction Studies
Artificial Life And Robotics
2015
SWARM 2015: The First International Symposium on Swarm Behavior and Bio-Inspired Robotics, Kyoto, Japan, October 28-30, 2015.p. 239 – 246
DOI : 10.1007/s10015-016-0291-8
Talks
Interacting with zebrafish using robotic agents
8th annual Swiss zebrafish meeting, Fribourg, Switzerland, April 10, 2015.
2014
Conference Papers
A Miniature Mobile Robot Developed to be Socially Integrated with Species of Small Fish
2014 IEEE International Conference on Robotics and Biomimetics (ROBIO 2014)
2014
IEEE International Conference on Robotics and Biomimetics, Bali, Indonesia, December 5-10.p. 747 – 752
DOI : 10.1109/ROBIO.2014.7090421
Social Adaptation of Robots for Modulating Self-Organization in Animal Societies
2014 IEEE Eighth International Conference on Self-Adaptive and Self-Organizing Systems Workshops (SASOW)
2014
2nd FoCAS Workshop on Fundamentals of Collective Systems, London, UK, September 8th, 2014.p. 55 – 60
DOI : 10.1109/SASOW.2014.13
Posters
Climate change, vegetation dynamics and carbon cycling in peatlands: the role of vascular plants in CO2 sequestration
15th Swiss Global Change Day, Bern, Switzerland, 2, April 2014.
2013
Conference Papers
ASSISI: Mixing Animals with Robots in a Hybrid Society
Biomimetic and Biohybrid Systems
2013
Living Machines, International Conference on Biomimetic and Biohybrid Systems, London, July 29 – August 2013, 2013.p. 441 – 443
DOI : 10.1007/978-3-642-39802-5_60
Book Chapters
A general methodology for the control of mixed natural-artificial societies
Handbook of Collective Robotics; Singapore: Pan Stanford Publishing, 2013. p. 547 – 586.ISBN : 978-9-81431-642-2
2012
Conference Papers
Development of a mobile robot to study the collective behavior of zebrafish
Proceedings of the IEEE International Conference on Biomedical Robotics and Biomechatronics, BioRob 2012
2012
IEEE International Conference on Biomedical Robotics and Biomechatronics, Roma, Italy, June 24-28, 2012.DOI : 10.1109/BioRob.2012.6290826
Building a safe robot for behavioral biology experiments
2012 IEEE International Conference on Robotics and Biomimetics (ROBIO)
2012
IEEE International Conference on Robotics and Biomimetics (ROBIO 2012), Guangzhou, China, December 11-14, 2012.p. 582 – 587
DOI : 10.1109/ROBIO.2012.6491029
Autonomous Construction of a Roofed Structure: Synthesizing Planning and Stigmergy on a Mobile Robot
2012 IEEE/RSJ International Conference on Intelligent Robots and Systems
2012
IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura, Algarve [Portugal], October 7-12, 2012.p. 5436 – 5437
DOI : 10.1109/IROS.2012.6386278
Autonomous construction with a mobile robot in a resource-limited environment: a demonstration of the integration of perception, planning and action
ECAI 2012
2012
ECAI 2012 European Conference on Artificial Intelligence, Montpellier, August 27-31, 2012.p. 1015 – 1016
DOI : 10.3233/978-1-61499-098-7-1015
2011
Theses
Animal-Robot Interaction for Ethological Studies : an Advanced Framework Based on Socially Integrated Mobile Robots
Lausanne: EPFL2011
p. 192.DOI : 10.5075/epfl-thesis-4981
2010
Conference Papers
Towards Mixed Societies of Chickens and Robots
Proceedings of the IEEE/RSJ 2010 International Conference on Intelligent Robots and Systems (IROS 2010)
2010
The IEEE/RSJ 2010 International Conference on Intelligent Robots and Systems (IROS 2010), Taipei, Taiwan, October 18-22, 2010.p. 4722 – 4728
DOI : 10.1109/IROS.2010.5649542
Posters
The PoulBot: a mobile robot for ethological studies on domestic chickens
Symposium on AI-Inspired Biology (AIIB).
2009
Conference Papers
Real-Time Audio-Visual Calls Detection System for a Chicken Robot
Proceedings of the 4th International Conference on Advanced Robotics
2009
14th International Conference on Advanced Robotics (ICAR 2009), Munich, Germany, July 22-26, 2009.p. 1 – 6
Design of Collision Avoidance System for a Chicken Robot Based on Fuzzy Relation Equations
Proceedings of the 2009 IEEE International Conference on Fuzzy Systems
2009
2009 IEEE International Conference on Fuzzy Systems, Jeju, Korea, August 20-24, 2009.p. 1851 – 1856
DOI : 10.1109/FUZZY.2009.5277298