Enabling Technologies for Personal Aerial Transportation Systems
Mycopter is a new project funded by the European Union under the 7th Framework Programme to investigate enabling technologies for a personal aerial transportation system (PATS). More information can be found on the official project website.
Lifting public transportation into the third dimension

Considering the prevailing congestion problems with ground-based transportation and the anticipated growth of traffic in the coming decades, a major challenge is to find solutions that combine the best of ground-based and air-based transportation. The optimal solution would consist of creating a personal air transport system (PATS) that can overcome the environmental and financial costs associated with all of our current methods of transport.
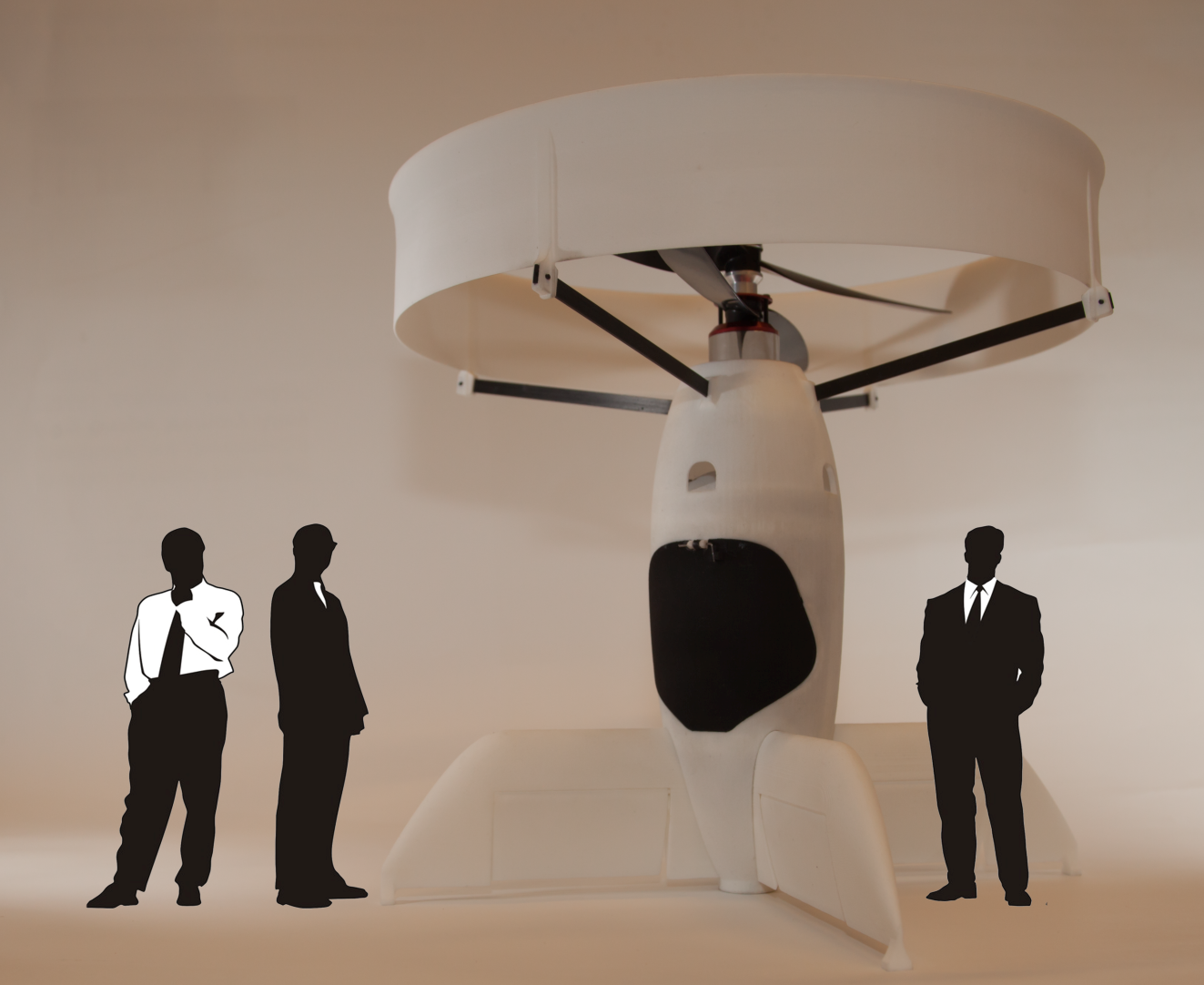
We propose an integrated approach to enable the first viable PATS based on Personal Aerial Vehicles (PAVs) envisioned for travelling between homes and work places, and for flying at low altitudes in urban environments. Such PAVs should be fully or partially autonomous without requiring ground-based air traffic control. Furthermore, they should operate outside controlled airspace while current air traffic remains unchanged, and should later be integrated into the next generation of controlled airspace.
The myCopter project aims to pave the way for PAVs to be used by the general public within the context of such a transport system. The project consortium consists of experts that can make the technology advancements necessary for a viable PATS, and a partner to assess the impact of the envisioned PATS on society (socio-technological evaluation). To this end, test models of handling dynamics for potential PAVs will be designed and implemented on unmanned aerial vehicles, motion simulators, and a manned helicopter. In addition, an investigation into the human capability of flying a PAV will be conducted, resulting in a user-centred design of a suitable human-machine interface (HMI).

Furthermore, the project will introduce new automation technologies for obstacle avoidance, path planning and formation flying, which also have excellent potential for other aerospace applications. This project is a unique integration of technological advancements and social investigations that are necessary to move public transportation into the third dimension.
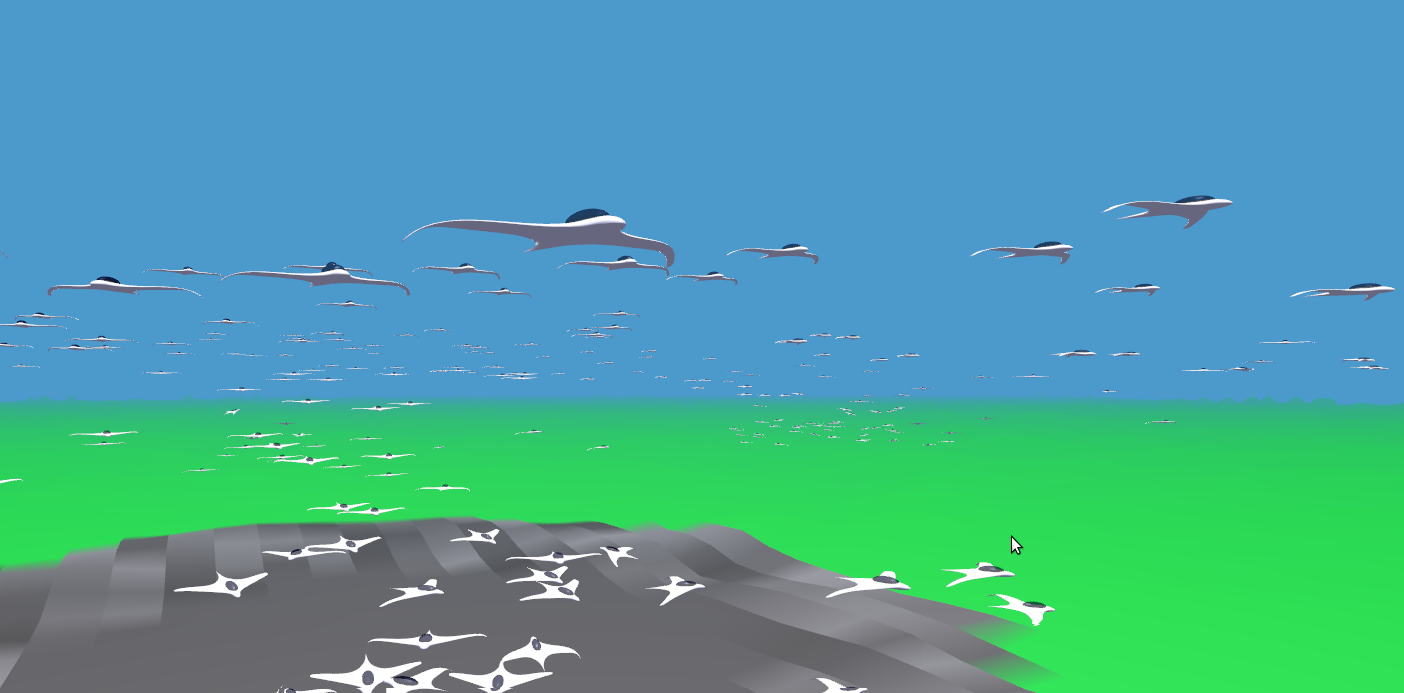
Our task is to identify sensor systems that can detect multiple aircrafts reliably, either collaboratively (by automatic communication with nearby PAVs) or non-collaboratively (detecting aircrafts and other obstacles that do not carry a compatible collision avoidance system). Potential sensor modalities are based on GPS, radio communication, radar, acoustics, and electro-optical systems including laser sensors and computer vision. EPFL’s CVLab collaborates on computer vision techniques for detecting other aircrafts, and identifying obstacle-free landing locations. We will develop a small-scale sensor suite and test it on autonomous robotic aircrafts. This research has obvious potential benefits in the near future for Unmanned Aerial Vehicles (UAVs) and the currently available, lightweight personal aircrafts.

Partners
- Max Planck Institute for Biological Cybernetics (project leader)
- ETH Zürich
- Karlsruhe Institute of Technology
- University of Liverpool
- DLR Braunschweig
- EPFL CVLab
Publications
Electrically tunable giant Nernst effect in two-dimensional van der Waals heterostructures
Nature Nanotechnology. 2024-07-02. DOI : 10.1038/s41565-024-01717-y.Les fumées des trains à vapeur, un débordement industriel et professionnel (France, Grande-Bretagne, années 1860-1930)
Sueur et poussière. Une histoire environnementale des mondes du travail, Toulouse, June 6, 2024.Infectious disease spread in connected communities
Lausanne, EPFL, 2024.Diving into the heterogeneity of the visual system
Lausanne, EPFL, 2024.Impact of Mitofusin 2 in the Nucleus Accumbens on motivated behavior and underlying neurobiological mechanisms
Lausanne, EPFL, 2024.Politique du logement à Genève. Revenu des ménages, loyers et prix des logements
2024-06-21