Overview
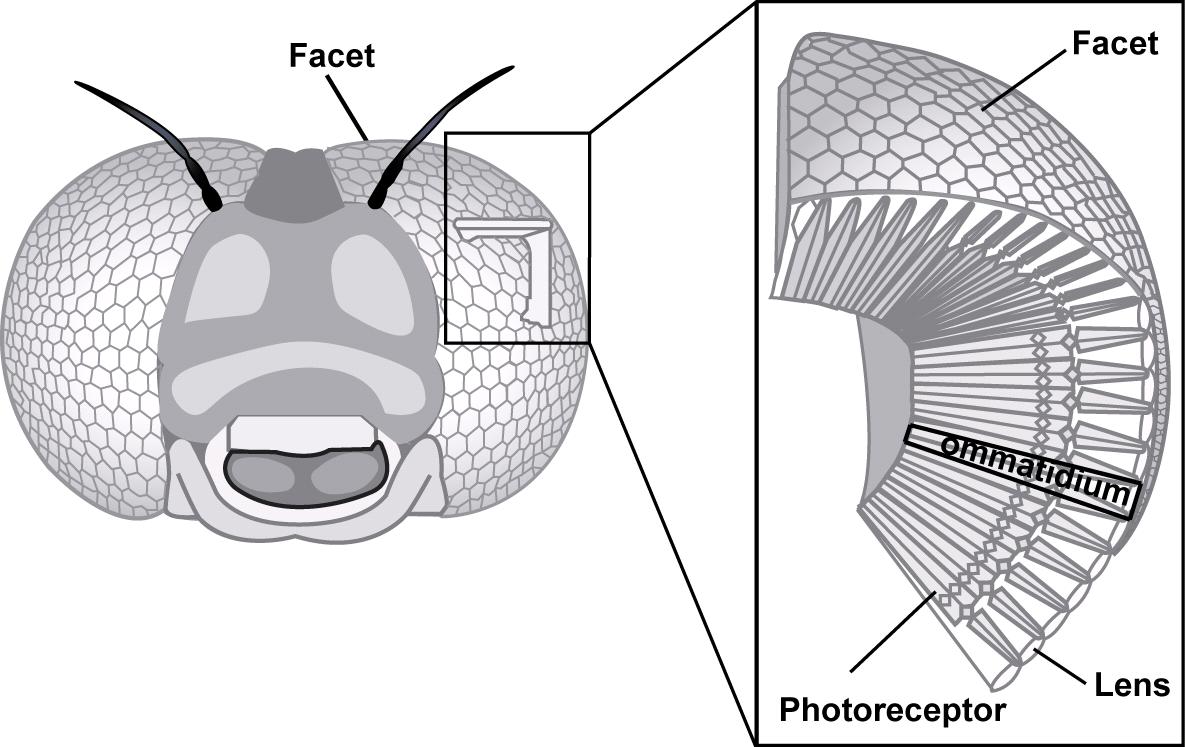
The vertebrate eye has provided inspiration for the design of conventional cameras with single-aperture optics to provide a faithful rendering of the visual world. The insect compound eye, in spite of bearing a comparatively lower resolution than the vertebrate eye, is very efficient for local and global motion analysis over a large field of view (FOV), making it an excellent sensor for accurate and fast navigation in 3D dynamic environments. Furthermore, compound eyes take several shapes and curvatures to fit the head and viewing directions of very different types of insects while offering the same functionality.
The goal of this project is to design, develop, and assess a novel curved and flexible vision sensor for fast extraction of motion-related information. We call these integrated systems CURVed Artificial Compound Eyes (CURVACE).
Compared to conventional cameras, artificial compound eyes will offer more efficient visual abilities for motion analysis, a much larger field of view in a smaller size and weight, bearing a thin packaging and being self-contained and programmable. Additionally, we will use neuromorphic imagers with adaptive sensitivity, and the rendered images will yield less distortion and less aberration. Furthermore, the fabricated CURVACE will bear mechanical adaptability to a range of shapes and curvatures, and some versions will offer space within the convexity for embedding processing units, battery, or additional sensors that are useful for motion-related computation.
In addition to the scientific and coordination management, the Laboratory of Intelligent Systems has the following roles in the project:
- Conception of specifications of the global design of CURVACE
- Design and production of the novel flexible printed circuit boards as well as its integration with the compound eyes
- Design and fabrication of the spherical compound eye as well as its integration and validation in in-house flying robots for navigation control and egomotion estimation
- Research on novel formulas of sensor fusion between visual and inertial information acquired with the artificial compound sensor
- Design and fabrication of the tape compound eye and integration and validation as a wearable vision sensor to be used by vision-impaired people for collision avoidance


Applications of CURVACE as vision sensors for flight navigation control in microflyers (left) and as collision-alert system for visually impaired people (right)
Miniature CURVACE prototype
Floreano D, et al. (2013) Miniature curved artificial compound eyes. Proc Natl Acad Sci U S A, available online.

Curved Artificial Compound Eye. (A) Image of the CurvACE prototype. The entire device occupies a volume of 2.2 cm3, weighs 1.75 g, and consumes 0.9 W at maximum power. (B) Illustration of the panoramic FOV of the fabricated prototype. The dots and circles represent the angular orientation and acceptance angle of every ommatidium, respectively.