K035————————————————————–
 Control of a laser beam stabilization system
Control of a laser beam stabilization system
Laser beam stabilization is a technology frequently used in aerospace, in manufacturing equipment such as semiconductor inspection or materials processing, and in biomedical systems. All these applications require precise mechanical alignment free of annoying effects like vibrations introduced by nearby mechanical components (e.g., fans). To address this issue, stabilization systems are required to simultaneously manage both large-angle/low- frequency, and small-angle/high-frequency corrections. Applying this technology will also result in improved performances (and life cycles) of system components, like bearings, motors and sensors.
The goal of this project is to design a controller to reject the effect of periodic disturbances (multi-sinusoidal) on the output of the laser beam system. The designed controller should be applied on a real experimental setup using Labview.
Requirements: Strong background in linear control systems and power electronics. Good programming skills in MATLAB and SimPowerSystems.
MER: Alireza Karimi
Type of project: Semester
Contact: Christoph Kammer
Student: Antoine Burnard
K034—————————————————————————-
 Current control of grid-connected converters with LCL filters
Current control of grid-connected converters with LCL filters
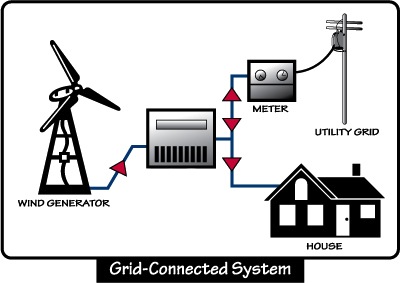
Grid-connected converters are important in distributed generation (DG) units, e.g. wind turbines and solar photovoltaics, which are connected to the utility grid through either L or LCL filters. In the grid-connected mode, a current control strategy is required to regulate the real and the reactive power exchange between the DG units and the grid.
Recently an LMI-based current control scheme has been designed for the grid-connected converters in abc-frame. The proposed controller consists of a resonant and a state feedback controller. The resonant controller provides the tracking of sinusoidal grid current reference at 50 Hz while the state feedback controller guarantees the robust stability in the presence of grid inductance parameter uncertainty.
The aim of this project is to design a decoupled current controller for the model of a grid-connected converter in dq-frame where the system is assumed to be under a balanced condition. In this case, the resonant controller is replaced with an integrator. The controller design strategy consists of an optimization-based loop shaping in the Nyquist diagram. The designed controller is implemented in SimPowerSystems environment of MATLAB or equivalent software (e.g. PSCAD/EMTDC).
Requirements: Strong background in linear control systems and power electronics. Good programming skills in MATLAB and SimPowerSystems.
MER: Alireza Karimi
Type of project: Semester
Contact: Mahdieh Sadabadi
Student: Chun Xie
J032——————————————————————————–
 Cooperative formation control and navigation under bandwidth limitations
Cooperative formation control and navigation under bandwidth limitations
With the advent of powerful embedded processors, sensors, and acoustic communication systems, there has been increasing interest in the use of autonomous underwater vehicles (AUV’s) for ocean exploration.
The application of distributed control algorithms on autonomous underwater vehicles will allow missions that require multi-sensor interaction in close vicinity of a terrain being surveyed, which is generally a difficult task for a single vehicle.
As an example, we consider a mission where one or more surface vehicles (the anchor vehicles) are equipped with GPS, so as to follow desired paths. It is up to the remaining follower vehicles in the fleet to reach and keep a desired formation with the anchor vehicles. The follower vehicles are required to maneuver into formation by relying on measurements of their distances to the other vehicles and exchanging complementary data with them.
Two projects are considered under this topic:
- The objective of the first project will be the estimation of the relative position of the follower vehicles using moving horizon estimation, a state estimation method, and simulate its performance. Some attention will be devoted to the modelling of the physical system for the simulation setup.
- One of the main difficulties in formation control is that there are limitations on the communication links between vehicles. Acoustic communications have a low bandwidth, is prone to packet losses, and simultaneous communications are impossible. The objective of the second work is, therefore, to devise a distributed extended Kalman filter that takes into account the fact that a limited number of bits per second can be exchanged between vehicles. Some attention will be devoted to the modelling of the communication performances for the simulation setup.
Requirements: Good background in Nonlinear Control, MATLAB.
Professor: Colin Jones
Type of project: Semester
Contact: Francisco Rego
Student: Thierry Dubosson
J036——————————————————————————–
 Control of quadcopters
Control of quadcopters
Quadcopters serve as a challenging test bench for control and machine learning algorithms in academia. Commercially, they are usually used for surveillance. However, if reliable control is ensured, a fleet of quadcopters can be used for physically demanding and complex tasks, such as carrying heavy payloads or building structures.
In this project, we aim to develop and test control algorithms, with which we will control quadcopters and accomplish physical tasks. The project will involve, development of a state estimator with the available camera setup, and implementation of model based control algorithms. The state estimator and controllers will be tested on the available quadcopters at LA.
Professor: Colin Jones
Type of project: Semester
Contact: Altug Bitlislioglu, Tomasz Gorecki and Jean-Hubert Hours
Students: Loic Dubois, Vivien Streit
J025——————————————————————————-
 POsitioning and visuaL LOcking (POLLO)
POsitioning and visuaL LOcking (POLLO)
The project is inspired by the stabilization capability of a family of birds (see video). The goal is to build a robotic dual that emulates such behavior using vision feedback system.
With this project the student will have the possibility to experience all the phases of the design and prototyping of a mechatronic system.
From mechanical modeling to physical implementation through implementation of a controller on a micro-computer, the student will create a visual servo system for object positioning and stabilization.
Requirements: the student should possess great practical skills and enthusiasm.
Professor : Colin Jones
Type of project: Semester
Contact: Andrea Alessandretti
Students: Dorian Konrad, Benjamin Le Trequesser, Leo Sofia
J034——————————————————————————-
 Robots Arena: Network based system of motion control of robotic vehicles
Robots Arena: Network based system of motion control of robotic vehicles
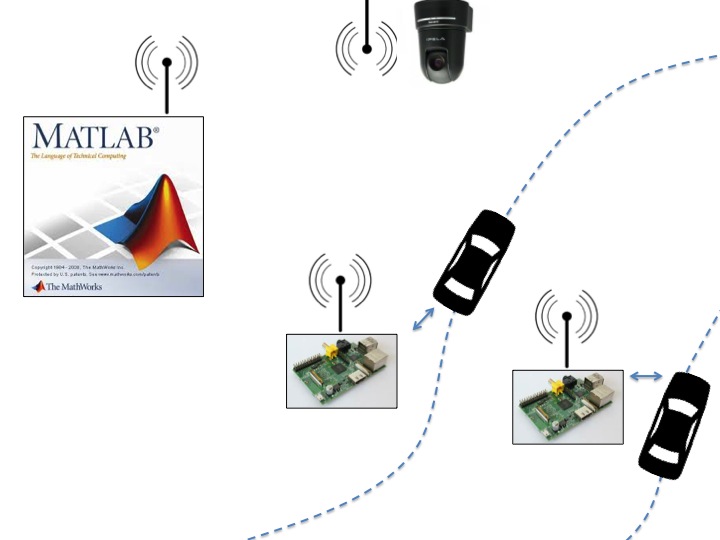
This project focuses on the realization of a software and hardware platform for the control of multiple robotic vehicles.
The structure consists of three main components interconnected via WiFi:
- A Matlab server, for coordination.
- Micro computers (e.g. Raspberry pi) mounted on board of the vehicles an connected to the actuators and sensors of the vehicles.
- Camera system in charge of detecting the position of the vehicles.
Requirements: the student should possess (or be willing to earn) great practical skills (hardware/programming) and enthusiasm!
Professor : Colin Jones
Type of project: Semester
Contact: Andrea Alessandretti
Student: Salah Missri
J009——————————————————————————–
 Parameter estimation of building models for using EnergyPlus
Parameter estimation of building models for using EnergyPlus
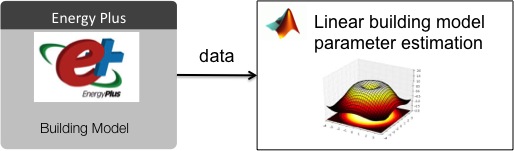
Buildings account for 40% of the total energy consumption. Therefore, efficient building operation can save a significant amount of energy. Recently, Model Predictive Control (MPC) has been demonstrated to be a suitable control framework for buildings. However, MPC requires a model of the real building. Available models from high detail simulation tools are not suitable for control. Therefore, we have developed a MATLAB toolbox, OpenBuild, capable of extracting a linear RC thermodynamic model from building data.
A previous project has experimented different method of system identification for building models, based on data from a simulation tool. Concurrently, the automatic control lab offices have been equipped with sensors and actuation. This project has two main goals: finishing the work initiated with the first project by deciding on the best identification method available and applying these results to the real data to identify the model of the laboratory. Successful completion of the project may provide the student an opportunity to contribute towards the open source building simulation platform, “OpenBuild”. Good knowledge of MATLAB is required , and some knowledge in programming (SQL, bash) and system identification is preferred.
Professor: Colin Jones
Type of project: Semester
Contact: Faran Qureshi, Tomasz Gorecki
Student: Bertrand Buisson
J029——————————————————————————–
 Fast positioning in babyfoot
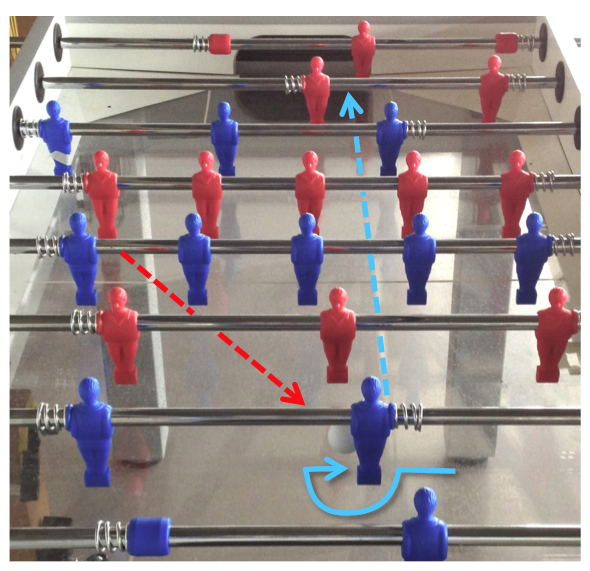
Fast positioning in babyfoot
A babyfoot has been modified over the previous semesters to actuate 2 arms (goal keeper and defenders). The system is able to track the ball, stop it (most of the time) and kick it back to the opponent goal.
The aim of this project is to design and test strategies to beat the human opponent. If needed the existing hardware can be upgraded. This project is mainly a programming project.
This project may be split up into 2 semester projects.
Professor: Colin Jones and Christoph Salzmann
Type of project: Semester
Contact: Milan Korda
Student: Simon Metrailler
J022——————————————————————————-
 Modeling and control of a flapping wing aircraft (Ornithopter)
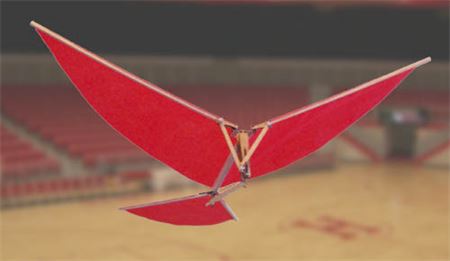
Modeling and control of a flapping wing aircraft (Ornithopter)
Biological flyers, such as ornithopters, use different means of propulsion than human engineered air vehicles. In specific they use flapping wings instead of spinning blades to move and steer. This allows them to be lightweight and highly manoeuvrable. They also present an interesting case for studying nonlinear system dynamics and control in periodic settings.
Nonetheless, the aerodynamic forces generated by flapping are not easily quantifiable. The project aims in modelling the unknown ornithopter dynamical system starting from first principles and moving towards model identification and learning techniques through experimental testing. The second part of the project will focus in synthesising a controller that employs the developed model and exploits the periodic properties of the system.
Professor: Colin Jones
Type of project: Semester
Contact: Sanket Diwale and Ioannis Lymperopoulos
Student: Igor Ayrton
J024——————————————————————————-
 Robotic monitoring and surveillance
Robotic monitoring and surveillance
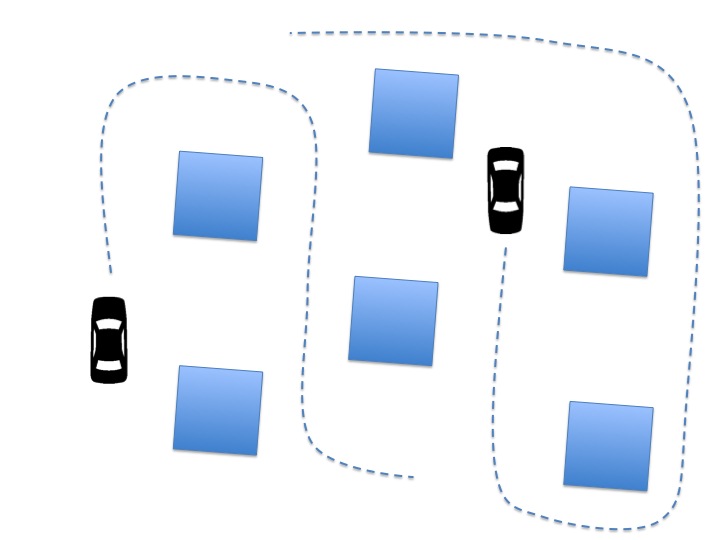
Patrolling techniques have always been used from people to cover important tasks such analysis of the changes in the territory, surveillance of sensible areas, or agriculture monitoring. With the striking increase of cheap drones in the market, automated patrolling becomes everyday more popular.
This is a research-oriented project aiming to analyze a novel optimization based control strategy for robotic monitoring.
Requirements: the student should possess (or be willing to earn) a background on Model Predictive Control!
Professor : Colin Jones
Type of project: Semester
Contact: Andrea Alessandretti
Student: Julien Leimer
J033——————————————————————————-
 HYDROS control of a hydrofoil boat
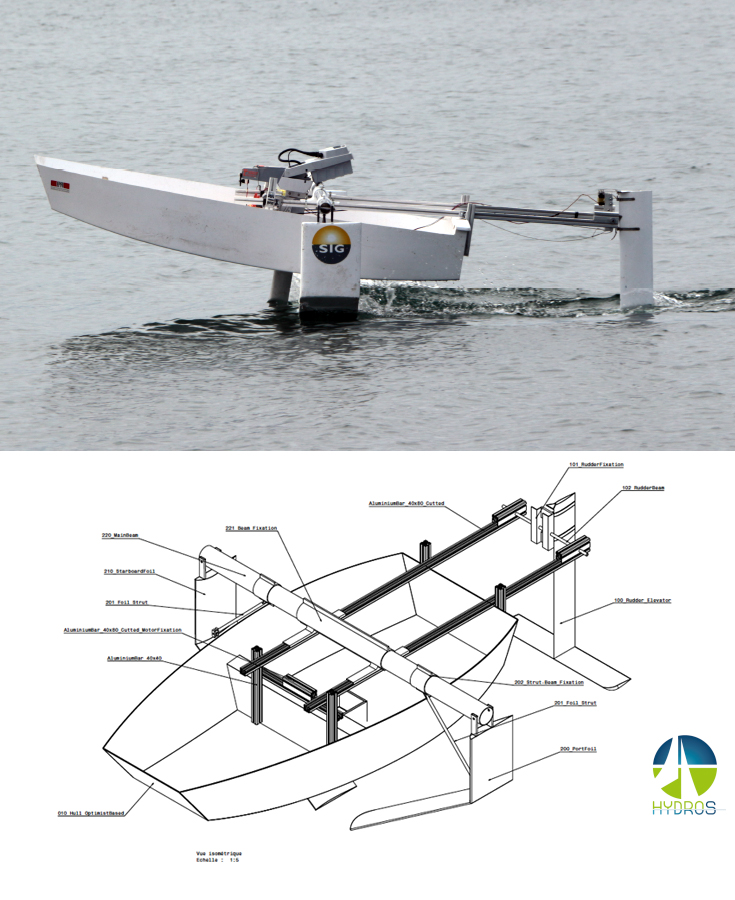
HYDROS control of a hydrofoil boat
HYDROS, the Swiss scientific research center specialized in sailing, is holding an engineering competition to take place in lake Léman, summer of 2014 (see link). The goal is the construction of an energy efficient hydrofoil boat. EPFL has forged a group of teams that specialize on optimizing each of the specific components of the system. LA is responsible for the dynamical modeling of the boat in order to plan effective trajectories and track them in the face of uncertainties.
The first part of the project focused in modeling the boat dynamics and discovering the optimal control policies in simulation. The second part, due to start in the next spring semester, is going to explore the interaction of the boat with the environment in a realistic setting. Model-mismatch and external disturbances might deem the control policies suboptimal or even infeasible. The project will focus in robustifying the system against uncertainties.
Professor : Colin Jones
Type of project: Semester
Contact: Ehsan Sarshari and Ioannis Lymperopoulos
Student: Freek Pepping
B050——————————————————————————–
Implementation of optimization-based path-following control of a robot
In many applications such as machine tooling or robot motion a robot has to be precisely steered along a given geometric reference path.
This project aims at implementing a path-following control scheme on a laboratory system. Because of imperfect model knowledge, the scheme relies on measurements to optimize the path-following performance on a run-to-run basis.
The project involves the design of the optimization scheme and its implementation using Matlab/Labview. Hence, a solid knowledge of Matlab and Labview would be helpful.
Professor: Dominique Bonvin
Type of project: Semester
Contact: Predrag Milosavljevic and Timm Faulwasser
Student: Rodriqo Coronelloza
J037——————————————————————————–
 Fast Toy Lab – Design of micro-scale cars for automatic racing
Fast Toy Lab – Design of micro-scale cars for automatic racing
The Fast Toy Lab is developing a high-speed, micro-scale autonomous course for small-scale RC cars. We are aiming at producing extremely fast and tiny cars and controllers capable of racing against all comers!
This project will design a autonomous car for racing task based on a new 1:27 scale Min-Z car. The student will integrate an IMU board for communication and control onto the Min-Z car and identify the model of the modified car.
Followings are the possible steps for the project:
- Survey literatures for race car design.
- Integrate IMU board (for communication and control) and encoders to the car.
- Identify the model for the new 4-wheel driven car and develop simulation platform.
- Investigate control strategies, if time permits.
Requirements: Knowledge of Control Theory and Electronics and Matlab
Professor: Colin Jones
Type of project: Semester
Contact: Ye Pu and Jean-Hubert Hours
Student: Patrick Spieler
J021——————————————————————————–
 Fast optimization on FPGA
Fast optimization on FPGA
Model Predictive Control has proven very efficient at handling constraints. Yet it requires solving a quadratic programming (QP) at each sampling time, which can be challenging for fast and complex dynamics.
FPGA implementation is a promising direction for coping with this challenge, as they can be customised to specific applications and parallelisation can be exploited further.
The project will be focused on implementing algorithms for solving a specific class of structured QPs on FPGA, such as fast gradient or projected successive over relaxation. An output of the project should be a set of FPGA functions for simple linear algebra operations. The developed algorithms can then be tested on a real application in power electronics or autonomous vehicles. Skills in VHDL, FPGA programming and optimisation are a plus.
Professor: Colin Jones
Type of project: Semester
Contact: Jean-Hubert Hours, Harsh Shukla and Faran Qureshi
Student: David Lambelet
K039——————————————————————————–
 Control of an Air-Hockey Robot
Control of an Air-Hockey Robot
The aim of this project is to design, implement and compare more sophisticated control algorithms to accurately control the position and velocity of the robot arm. The focus lies on robust control using frequency domain data, but the project is very open and leaves a lot of room for creativity. The first task of the student will be to perform a proper system identification. Once a satisfactory model is identified, the student should design an appropriate controller to achieve accurate and fast tracking and positioning of the robot arm. The exact nature of this controller will be defined during the project. If time permits, multiple controllers will be defined and their performance will be compared.
MER: Alireza Karimi
Type of project: Semester
Contact: Christoph Kammer
Student: Etienne Thalmann