J020——————————————————————————–
 Data-based weather prediction models for control
Data-based weather prediction models for control
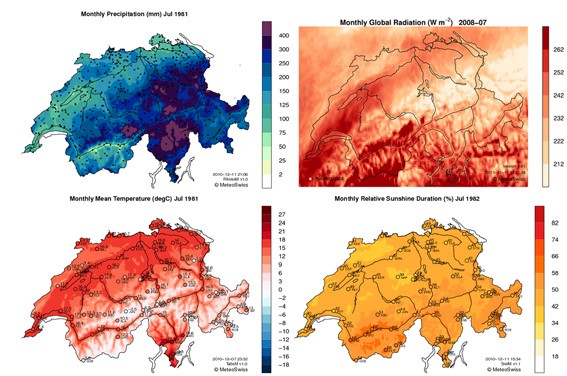
In order for a building to be able to participate in a demand-response program, as part of a smart grid, a model of its thermal/electrical behaviour is required, along with the predictions of external factors. These factors (solar radiation, wind, outside temperature etc.) can seriously affect the quality of the control policy generated from the building controller, practically rendering the control scheme invalid in case of high uncertainty.
Incorporating the stochastic model of the weather prediction in control design can improve the performance of the system. Usually the weather forecasts are available, but are not very accurate. The goal of this project is to develop weather prediction models using historic weather measurement, and weather forecast data. These models will be used in a subsequent stage in order to develop more accurate predictive controllers.
There are several data-based techniques to develop prediction models in the absence of physical intuition, e.g. by means of Gaussian Processes. The interested student will be expected to develop prediction models using different machine learning techniques, and evaluate their performance. A strong mathematical background and experience in implementation of algorithms in Matlab is necessary.
Professor: Colin Jones
Type of project: Semester
Contact: Faran Qureshi, Tomasz Gorecki, Georgios Stathopoulos and Altug Bitlislioglu
Student: Marlene Dollfus
B042——————————————————————————

Control of an experimental kite system
At high altitudes wind is considerably stronger, more stable and more consistent than wind close to the ground, making it an extremely promising, untapped source of energy. The problem is that the energy is several kilometers from the surface of the earth and constructing wind turbines 2 km tall is infeasible. A host of innovative ideas have been proposed for accessing high-altitude wind, such as floating turbines, self-sustained spinning foils and giant balloons. Kites appear to be one of the most promising (and realistic) means of harnessing this energy.
The primary goal of this project is to design and implement an automatic control system for a kite using a control and sensing unit that has been built in our lab. Practical tests will be carried out in the vicinity of the EPFL. An elementary controller has already been implemented, but it lacks robustness to noise, perturbations and delay. In this project an advanced controller (probably a Model Predictive Controller) will be designed, coded (Matlab or C) and tested.
This project is for students with a good knowledge of Control Theory and Matlab.
Professor: Dominique Bonvin
Type of project: Master
Contact: Sean Costello
Student: Nikitas Rontsis
J024——————————————————————————-
 Robotic monitoring and surveillance
Robotic monitoring and surveillance
Patrolling techniques have always been used from people to cover important tasks such analysis of changes in the territory, surveillance of sensible areas, or agriculture monitoring. With the striking increase of cheap drones in the market, automated patrolling becomes everyday more popular.
The goal of this project is to investigate and implement state of the art techniques for automated patrolling, where one or more vehicles are assigned to patrol a given area.
Professor : Colin Jones
Type of project: Semester
Contact: Andrea Alessandretti
Student : Jean Charles Gasche
L047——————————————————————————-
 Optimal control of a hydrofoil boat
Optimal control of a hydrofoil boat
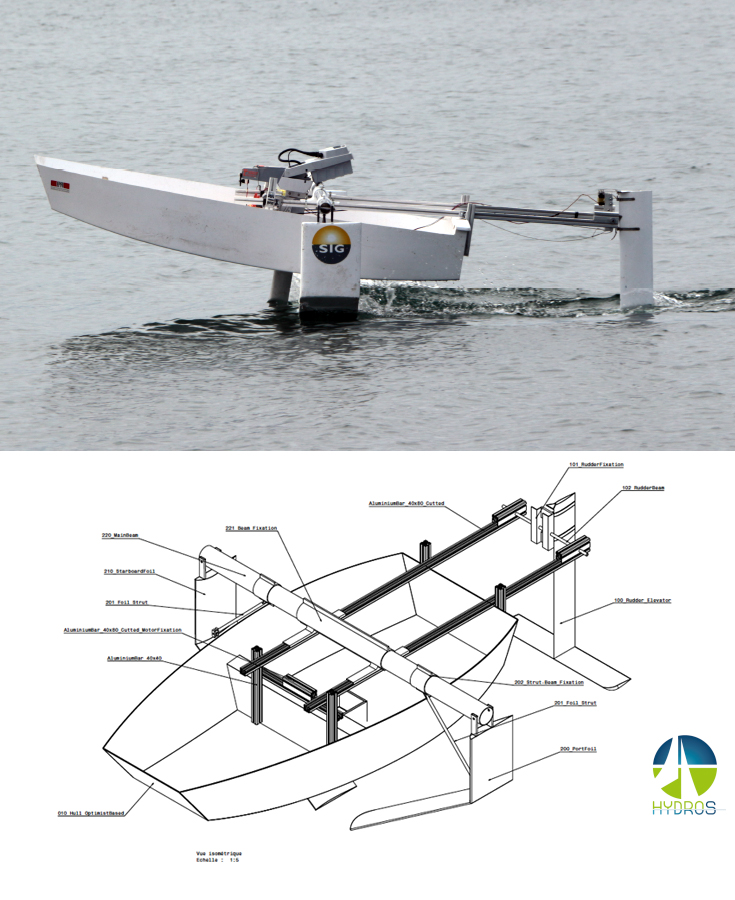
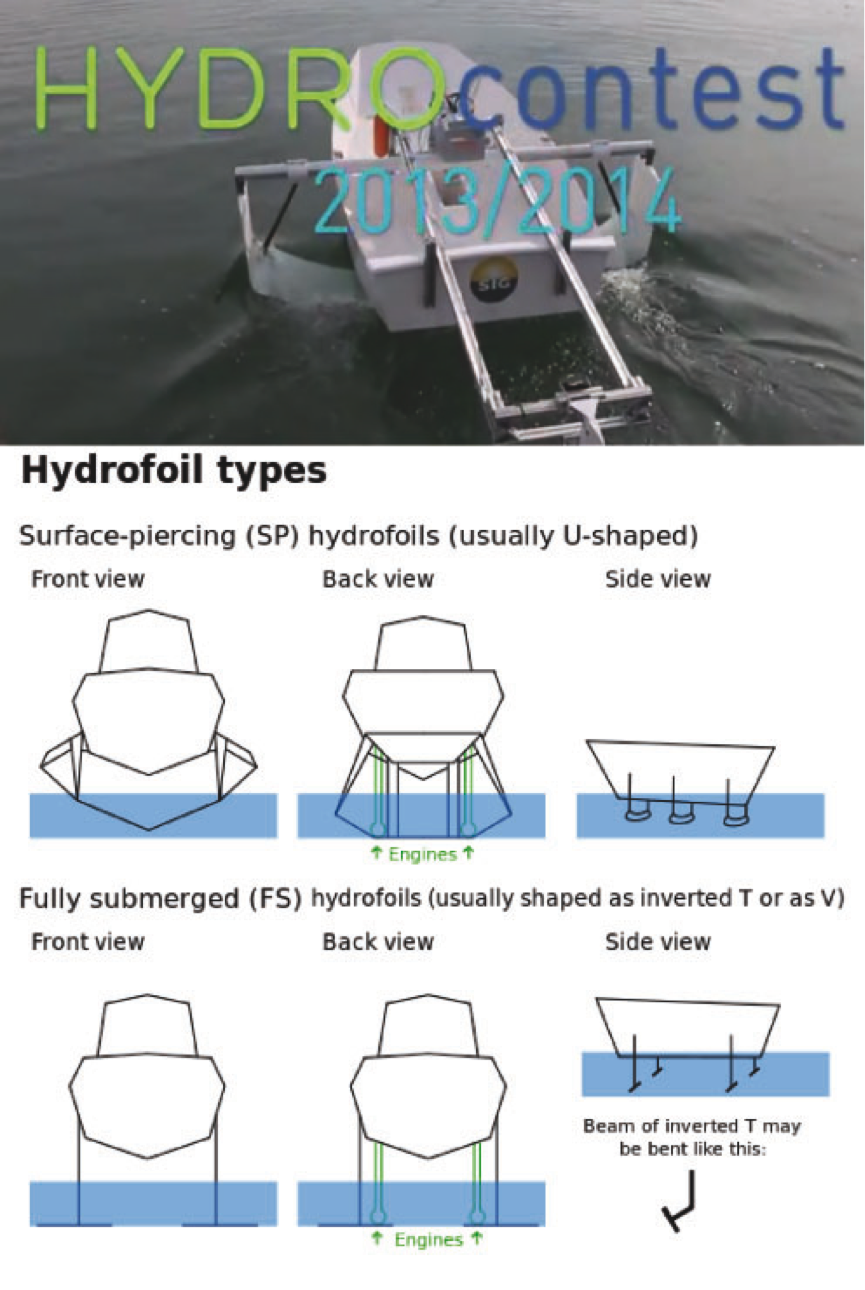
HYDROS, the Swiss scientific research center specialized in sailing, is holding an engineering competition to take place in lake Léman, summer of 2014 (see link). The goal is the construction of an energy efficient hydrofoil boat. EPFL has forged a group of teams that specialize on optimizing each of the specific components of the system. LA is responsible for the dynamical modeling of the boat in order to plan effective trajectories and track them in the face of uncertainties.
The first part of the project focused in modeling the boat dynamics and discovering the optimal control policies in simulation. The second part, due to start in the next spring semester, is going to explore the interaction of the boat with the environment in a realistic setting. Model-mismatch and external disturbances might deem the control policies suboptimal or even infeasible. The project will focus in robustifying the system against uncertainties.
Professor : Colin Jones
Type of project: Semester
Contact: Andrea Alessandretti, Ioannis Lymperopoulos
Student : Thibault Asselborn
J025——————————————————————————-
 Cooperative target tracking
Cooperative target tracking
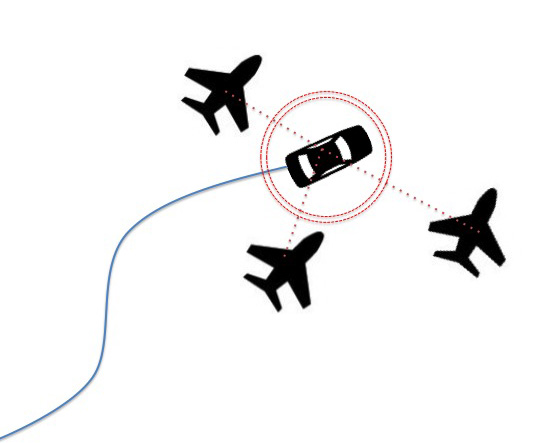
The estimation of the position of a moving vehicle is crucial task that is at the base of the design of any target following controller.
In this project we will investigate control strategies to drive and coordinate multiple followers vehicles in a smart way to track the target while obtaining a good quality of the estimation of the target position.
Professor : Colin Jones
Type of project: Semester
Contact: Andrea Alessandretti
Student : Marc Antoine Pallaud
J027——————————————————————————-
 Formation keeping with range only estimation
Formation keeping with range only estimation
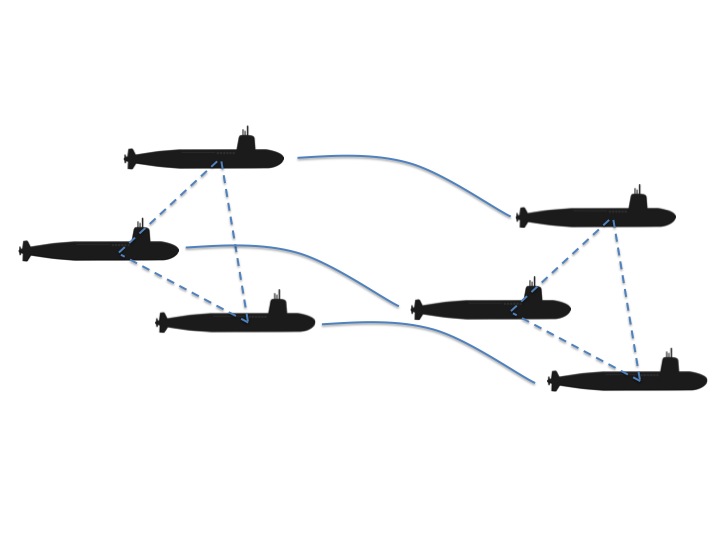
In order to perform formation keeping, crucial information is the relative position among vehicles. When only range measurements are available, e.g., sonars this information might be difficult to obtain or it might have a low quality.
In this project we will investigate control strategies to drive and coordinate multiple vehicles along a path while keeping formation and estimating each other position.
Professor : Colin Jones
Type of project: Semester
Contact: Andrea Alessandretti and Francisco Rego
Student : Yann Roth
J026——————————————————————————-
 Collision avoidance control design
Collision avoidance control design
A fundamental component of any autonomous vehicle is the ability of moving in cluttered enjoinment avoiding possibly moving obstacles.
In this project we will investigate and implement state of the art collision avoidance strategies and investigate potential improvements using optimal control techniques.
Professor : Colin Jones
Type of project: Semester
Contact: Andrea Alessandretti
Student : Marc Mitjans
L048—————————————————————————–
 Control of a hydrofoil boat
Control of a hydrofoil boat
The Energy company HYDROS has launched an engineering contest for students. The goal of the project is to construct an energy efficient hydrofoil boat, by improving a starter-kit. The project is a multi-disciplinary, multi-lab project. The Automatic Control lab will be responsible for control and sensing.
The hydrofoil boat will use an embedded controller to maintain pitch and roll stability. The student must design a control strategy, and choose the necessary sensors and processor. The student must carry out a review of existing hydrofoil stabilization strategies. Design factors that affect the control problem will be identified. Control strategies for the most likely scenarios will be designed based on simplified dynamic models. The required measured quantities will be identified, and the most suitable sensors to measure them obtained. More rigorous simulation-based testing and tuning of the control strategies will be carried out in the following semester. In the first semester the focus will be on defining a general control strategy, and obtaining and testing the hardware necessary to implement it.
This is a project for one student with a good knowledge of Control Theory.
Professor : Roland Longchamp
Type of project: Semester
Contact: David Ingram and Philippe Mullhaupt
Student : Roland Nussbaumer
B046——————————————————————————
 Modeling of surface catalytic reaction systems using the concept of extents
Modeling of surface catalytic reaction systems using the concept of extents
Modeling of chemical reaction systems is an important step for the monitoring, control and optimization of industrial processes. This is especially the case for surface catalytic processes where highly selective compounds are desired. Such a kinetic model typically describes the kinetics, the transport phenomena (mass transfer, adsorption of reactants, desorption of products) and the operating conditions of the reaction system. A number of challenges arise in the modeling of surface catalytic reaction systems. One such challenge is determining whether the reaction system is mass-transfer, diffusion or reaction limited and whether one or more types of active sites are involved in the surface catalysis.
For the analysis of surface catalytic reaction systems, it is important to separate the effects of the transport phenomena and of the reactions. A methodology called ’Extent-based Incremental Identification’ has been developed by the Laboratoire d’Automatique to separate the effects (called extents) of reaction, mass transfer, and inlet and outlet flows for homogeneous and gas-liquid reaction systems. The decoupled effects can then be used for model identification purposes.
This project will extend the methodology of ’Extent-based Incremental Identification’ to gas-solid or gas-liquid-solid reaction systems involving a catalytic process at the surface of a solid catalyst. Such an analysis will require to formulate the Langmuir-Hinshelwood-type kinetics using the concept of extents. During this project, the student will learn the state of the art in simulation of chemical reaction systems, model identification and parameter estimation using a Matlab programming environment.
Professor: Dominique Bonvin
Type of project: Master
Contact: Julien Billeter and Sriniketh Srinivasan
Student: Vibhuti Chhabra
J011————————————————————————–
 Beating the system
Beating the system
It is a mathematical fact that in the game of roulette the player always loses against the casino in the long run (as long as there is an upper bound on the size of the bet). The question is whether we can get a statistical edge over the casino by exploiting the physics of the game. Indeed, the rules of the game allow to place bets for a certain amount of time after the ball has been thrown in the wheel. Therefore, the player should be able to extract information on where the ball is going to land by observing the speed and position of the ball relative to the wheel, thereby biasing the odds in his/her favor. This conjecture has already been independently proven correct (see here), claiming to achieve an 18 % statistical edge.
The project will involve image processing (of the image of the ball and the spinning wheel), physical modeling of the ball’s trajectory and/or machine learning. Familiarity with these concepts and Matlab environment is recommended.
Professor: Colin Jones
Type of project: Master
Contact: Milan Korda
Student: Phlippe Paccaud
J024—————————————————————————
Polynomial optimization toolbox
This project will develop a Matlab toolbox for polynomial optimization, which is an emerging field of numerical mathematics founded on powerful theoretical results form real algebraic geometry. Applications of polynomial optimization permeate almost all branches of computational science ranging from control engineering, machine learning and computer vision to economics, graph theory and mathematical biology.
The software toolbox developed will provide a unified framework for modeling polynomial optimization problems, facilitating the use of these powerful tools by a broad scientific community. The focus will be on numerical efficiency of the implementation as well as clarity of the user interface.
Solid familiarity with programming in Matlab and a working knowledge of linear algebra are a necessary prerequisite for this project.
A student successfully completing the project will learn how to design scientific software, including writing an efficient numerical code and creating a user-friendly interface. In addition the student will acquire a basic understanding of polynomial optimization and a solid knowledge of computational mathematics.
Professor: Colin Jones
Type of project: Semester
Contact: Milan Korda and Stathopoulos Georgios
Student: Jonatan Bergquist
L046——————————————————————————-
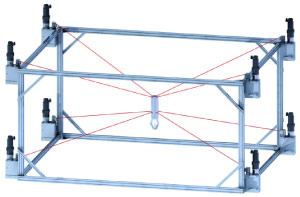
Control of cable-driven robots
A cable-driven robot is a robot manipulator driven by a set of cables. To actuate each degree of freedom a minimum of two cables are required. Thus, the system is highly over-actuated. There exist two types of systems. Suspended manipulators where the manipulator is a suspended platform is a network of cables and non-suspended manipulators which have un-actuated mechanical links between the manipulator and base. The advantage of such systems is the high degree of over-actuation. However, cables can only pull and this can severely restrict the system’s workspace.
The goal of this project is to model a non-suspended manipulator, analyse the wrench feasibility workspace and propose a control strategy.
Professor : Roland Longchamp
Type of project: Semester
Contact: David Ingram
Student: Jeremie Jaccard
L044——————————————————————————
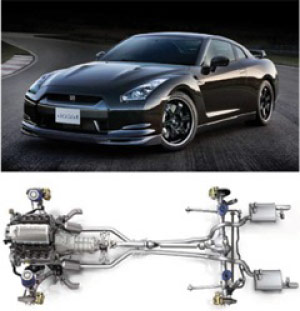
Modeling sports vehicle dynamics
The NISSAN GTR is a sports car which on paper has lower performance than most of its competitors such as the Jaguar XKR S, Porsche 911, etc… However, because of the electronic control systems it uses to manage the different parts of the car, (motor, gear box, suspension, breaks, etc…) it is able to beat it’s competitor on almost every level. It’s launch control system allows it to go from 0 to 100 km/h in 3 seconds. Its suspension management system allows it to go through corners at higher speeds. Thus, the NISSAN GTR really shows the advantages of using control to optimize the performance of a car.
The aim of this project will be to model a car in the general sense using the MATLAB/SIMULINK environment. Once a model is available, the performance of the car it to be analyzed and finally controlled.
Professor : Roland Longchamp
Type of project: Semester
Contact: David Ingram
Students: Patricia Parrado
B057———————————————————————————

Real time optimization for fuel cell based automobile applications
Fuel cells are electrochemical devices that produce electrical power from hydrogen and oxygen, while producing water. For automotive applications, proton exchange membrane (PEM) fuel cells show the best potential. However, these devices need to operate close to maximal efficiency to be viable, while respecting several stringent operating constraints to avoid reducing the lifetime of the cells and the autonomy of the vehicle. In automotive applications, the operation of PEM fuel cells is ruled by the need of producing the amount of power required by the driver. Whenever this power load changes, the optimal operating conditions of the fuel-cell stack change as well, thus calling for real-time adaptation of the operating conditions.
The aim of this project, which will be performed in collaboration with Belenos Clean Power Holding, a spin-off of the Swatch Group, is to optimize the operating conditions. The first step would be to carry out system modeling and numerical optimization. In the second step, available plant measurements should be taken into account and a real-time optimization strategy should be implemented for the simulation model. Depending on the project progress, it is foreseen to validate the real-time optimization algorithm on a real fuel-cell stack.
The student is required to have working knowledge of Matlab and interest in numerical optimization.
Professor: Dominique Bonvin
Type of project: Semester
Contact: Singhal Martand and Timm Faulwasser
Student: Lidia Stepanova
|
This project is carried out in collaboration with Belenos Clean Power Holding Ltd (Swatch Group) in Switzerland. |