K019—————————————————————————————–
Fixed-order controller design for a torsional system
The controllers obtained by the standard design procedures usually have high-orders and therefore they limit the scope of use in many practical applications. The design of low-, fixed-order controllers for linear time-invariant systems with uncertainty has always been a challenging problem for control engineers.
The main objective of this project is to design a fixed-order stabilizing controller satisfying some performance specifications for a torsional system by convex optimization. The system with all possible configurations can be modeled as a multi-model one. The designed controller should be applied on the experimental setup which is available in Automatic Control Laboratory.
The candidate should have a strong background in control theory and be familiar with LabVIEW programming.
MER: Alireza Karimi
Type of project: Master
Contact: Mahdieh Sad Abadi
Student: Ting Yao
L047———————————————————————————
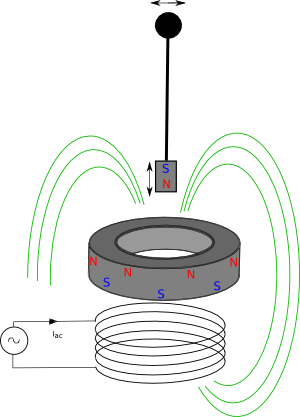
Theoretical study of a magnetically levitating Kapitza pendulum
The Kapitza pendulum is an inverted pendulum with basis forced in a rapid but small amplitude oscillatory motion. The remarkable fact is that it is stable in its upright position.
Magnetic tops are rotating tops levitating in a constant magnetic field. The kinetic moment due to the rotation prevents the top from flipping upside down and collapsing on the lower annular magnet.
Is it possible to combine these two ideas? The feasibility of a mix between the Kapitza pendulum and the magnetic flying top will be studied. A strong annular magnet provides for the main levitation force and also guarantee lateral stability. Additionally, a coil should provide an oscillatory vertical motion to the pendulum, leading to vertical stability through the Kapitza effect.
Keywords: Modeling, nonlinear systems, Lyapunov functions.
Requirements: Interest in maths
Professor : Roland Longchamp
Type of project: Semester
Collaborators: Basile Graf and Philippe Mullhaupt
Student: Paul Stadler
B042——————————————————————————–

Modeling and control of an experimental kite system
At high altitudes wind is considerably stronger, more stable and more consistent than wind close to the ground, making it an extremely promising, untapped source of energy. The problem is that the energy is several kilometers from the surface of the earth and constructing wind turbines 2 km tall is infeasible. A host of innovative ideas have been proposed for accessing high-altitude wind, such as floating turbines, self-sustained spinning foils and giant balloons. Kites appear to be one of the most promising (and realistic) means of harnessing this energy.
This involves modeling, identification, estimation and controller design:
Modeling: The student must develop a solid understanding of the aerodynamics of a kite, perform a literature review of kite – modeling and construct an ODE model in Matlab. This will be used to design and simulate tracking controllers.
Identification: Practical experiments will be devised to verify modeling hypotheses.
Estimation: The available measurements from sensors must be processed to estimate the kite’s position, velocity and orientation.
Controller design: The control techniques which can be applied range from PID to nonlinear control, or MPC.
Professor: Dominique Bonvin
Type of project: Semester
Collaborators: Grégory Francois and Sean Costello
Students: Paul Bertusi and Enea Martinoli
L045———————————————————————————
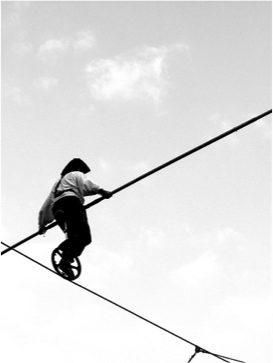
Modeling and control of a self-balancing unicycle
Many circuses propose an act where a person rides a unicycle across a wire usually holding a long pole. The pole is there to add stability to the system without which the act becomes virtually impossible due to high instability of the system (unicycle & rider). Adding a pole lowers the center of gravity of the system making it easier to stabilize.
The goal of this project is to develop a model of a unicycle without rider which can perform the circus act. Once a working model is developed, the next step is to design a control strategy for the system towards creating a robot capable of performing the act. Modeling such a system is challenging because of its complexity and numerous degrees of freedom. Control is also not a simple task because of the number of states and high instability.
Professor : Roland Longchamp
Type of project: Semester
Collaborators: David Ingram and Philippe Mullhaupt
Student: Dany Comment
L044———————————————————————————
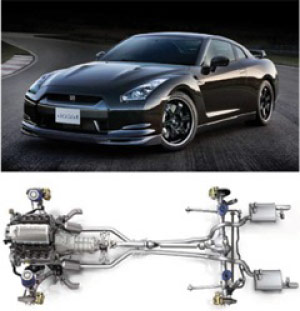
Modeling sports vehicle dynamics
The NISSAN GTR is a sports car which on paper has lower performance than most of its competitors such as the Jaguar XKR S, Porsche 911, etc… However, because of the electronic control systems it uses to manage the different parts of the car, (motor, gear box, suspension, breaks, etc…) it is able to beat it’s competitor on almost every level. It’s launch control system allows it to go from 0 to 100 km/h in 3 seconds. Its suspension management system allows it to go through corners at higher speeds. Thus, the NISSAN GTR really shows the advantages of using control to optimize the performance of a car.
The aim of this project will be to model a car in the general sense using the MATLAB/SIMULINK environment. Once a model is available, the performance of the car it to be analyzed and finally controlled.
Professor : Roland Longchamp
Type of project: Semester
Collaborators: David Ingram and Philippe Mullhaupt
Student: Watana Kaewkerd
B044—————————————————————————
 Iterative design of experiments
Iterative design of experiments
This project seeks to extend a real-time optimization methodology developed in our laboratory to the design of experiments (DOE). In standard DOE, experimental optimization is performed on a process where an acceptable model of the process is generally unavailable and where a limited number of experiments are intelligently chosen to build the model from scratch. Following this step, the resulting model is optimized to arrive at a sort of “optimal” performance. In general, this will not be the real optimum of the process, and so further experiments would be needed to find it.
The goal of the current project is to use the optimum given by the DOE methodology as a starting point for modifier adaptation, which is an iterative optimization method that would then adapt the operating conditions to find the true local optimum for the process. A number of theoretical, and potentially experimental, problems could be chosen to test the method, but the interested student, if he or she so wishes, would also be free to select their own application of interest. A comparison with the traditional “evolutionary optimization” approach may also be made.
Professor: Dominique Bonvin
Type of project: Semester
Collaborators: Gene Bunin and Grégory Francois
Student: Ioritz Alberdi Balentziaga
G043——————————————————————————–
Optimal control of blood glucose concentrations under uncertainty for patients with type-1 diabetes
Patients with type-1 diabetes need to maintain their blood glucose concentrations within narrow bounds to stay healthy. However, this is very difficult as these concentrations have large, sometimes unexplainable fluctuations. It is thus very difficult to predict exact future glucose concentrations, but it is very valuable to know at least the range of possible concentrations the patient could be in at a certain time. Using this information for optimizing insulin infusions could make diabetes treatment safer and more efficient.
Recently, a stochastic model that allows to give confidence intervals on blood glucose predictions has been developed. Additionally, in a previous project, different objective functions for optimizing insulin infusions have been tested. The goal of this project is to introduce the use of confidence intervals into the objective function. It should be shown that this method effectively leads to better and safer results than the standard method.
This project is carried out in collaboration with a multinational pharmaceutical company.
MER : Denis Gillet
Type of project: Master
Collaborators: Alain Bock and Gregory Francois
Student: Junfeng Lu
K022———————————————————————————
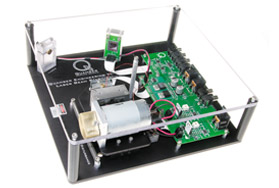
Controller design for adaptive regulation of an active suspension system
The aim of this project is design of a controller for an active suspension system. The controller will be tested on an experimental platform. The platform consists of three floors (plates) on top of each other. The top and the middle plates are connected with two springs and a tunable damper, and also with DC motor which serves as an actuator for active suspension. The bottom plate serves as a source of vibrations of top plate which are measured by accelerometer (acceleration relative to platform ground).
The objective of the project is to identify the model of the system and compute a controller to reject sinusoidal disturbance with narrow-band time-varying frequency. Different controller design methods developed in the Automatic Control Laboratory of EPFL will be used. Appropriate adaptation scheme, combined with estimation of disturbance frequency, will be used for the adaptation of controller.
MER: Alireza Karimi
Type of project: Semester
Assistant: Zlatko Emedji
Student: Raphael Duner
K025—————————————————————————————-
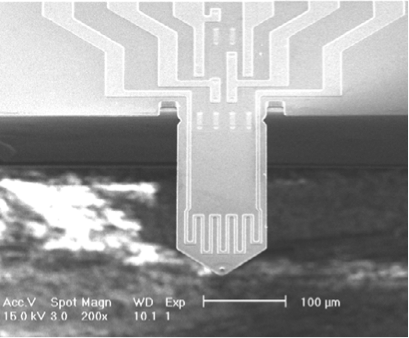
Control of MEMS cantelivers for high speed atomic force microscopy (AFM)
Nanoscale characterization of samples has become one of the main tasks of atomic force microscopy (AFM) and related techniques. A novel method (quantitative nanomechanical mapping) has recently shown a lot of promise for measuring the mechanical properties of samples at the nanometer scale. This method however is time consuming, since it involves nano-indentation at hundreds of thousands of points in the sample, and obtaining a single image takes up to 30 minutes. The main limitation for acquiring the image faster is the mechanical bandwidth of the AFM system.
In this project, a novel self actuated MEMS cantilever is used to perform the nanomechanical measurements at high speeds. For this, a controller for the MEMS cantilever should be designed to obtain the maximum achievable bandwidth. The cantilever will be used for quantitative nanomechanical measurements on biological samples.
This project is carried out in collaboration with Laboratory for Bio- and Nano Instrumentation of EPFL.
Professor: Georg Fantner and Alireza Karimi
Type of project: Semester
Assistant: Zlatko Emedi
Student: Yvan Gugler
B046——————————————————————————–
 Analysis of Fluid-Fluid Reaction Systems with Reactions in Both Phases
Analysis of Fluid-Fluid Reaction Systems with Reactions in Both Phases
Modeling of chemical reaction systems is an important step towards the understanding of the underlying steps of an industrial process. Such a model should describe the kinetics, the mass transfers and the operating conditions of the reaction system. A number of challenges arise in the modeling of fluid-fluid (F-F) reaction systems. One such challenge is determining whether the reaction system is mass-transfer or reaction limited and whether reactions take place within one or two phases.
For the analysis of F-F reaction systems, it is useful to isolate the effects of the individual reactions and mass transfers. A methodology called ‘Extent-based Incremental Identification’ has been recently developed by the Laboratoire d’Automatique for computing the effects (called extents) of reaction and mass transfer, when the reactions occur within a single phase. The separated effects can then be used for model identification purposes.
This project will focus on extending the methodology of ‘Extent-based Incremental Identification’ to F-F reaction systems with reactions taking place in both phases. Such a modeling will require separating the effects of the reactions in each phase. During the course of the project, the student will learn the state of the art in simulation of chemical reaction systems, model identification and parameter estimation using a Matlab programming environment.
Professor: Dominique Bonvin
Type of project: Semester or Master
Collaborators: Julien Billeter and Sriniketh Srinivasan
Student: Adrien Calabria
L046———————————————————————————

Modeling and Control of a magnetic pendulum
A magnetic pendulum is a stiff pendulum with a magnet on it’s tip. The pendulum swings above a plane containing a certain number of magnets. The interest of such a system is the large number of equilibrium points created by the presence of multiple magnets. Another interest in such a system is the control of the pendulum using the magnet force created between it and the magnets positioned in the plane. The controller not only has to deal with the dynamics of the pendulum but also with the dynamics of the interaction between the magnets.
A first goal of the project is to model the dynamics of the system and do an identification of the equilibrium points. A second goal will be to control the motion of the pendulum by controlling the position and velocity of the magnets in the plane. In contrast with magnetic levitation, the pendulum is attracted to the magnets and can thus be moved over the plane.
Professor : Roland Longchamp
Type of project: Semester
Collaborators: David Ingram and Philippe Mullhaupt
Student: Benjamin Joé Pruijs
J006—————————————————————————————
 iFly : the Flying iPod
iFly : the Flying iPod
The goal of the project is to build a quadcopter with a standard iPod as the onboard computer. To do so, a key step is the development of an application for the iPod. Then, the controller is to be implemented along with the microcontroller for transmitting the control information to the actuators. A possible development for the project could be path-following: the user should be able to input a trajectory using an application on a computer, and the iPod should be able to control the quadrotor to follow the specified path.
Tasks:
– Build a quadcopter.
– Develop an iPod application for computing the control inputs and communicating with the user’s computer, and the quadcopter microcontroller.
– Identify the physical parameters of the quadcopter.
– Design a path-following controller (probably using MPC).
Professor: Colin Jones
Type of project: Semester
Assistant: Jean-Hubert Hours
Student: Romain Baud
J008—————————————————————————————
 Optimal Path-Following for Scale Racing Cars
Optimal Path-Following for Scale Racing Cars
This project will develop control strategies for scale racing cars. The emphases are placed on designing a fast path-following controller based on model predictive contouring control (MPCC). The goal of the project is to formulate a mathematical framework for scale car racing and investigate the MPCC controller. Then we will demonstrate the results with software simulation and hardware implementation. The project may follow the steps below:
- Survey techniques for optimal path-following and model predictive control theory.
- Establish a framework for time-continues path-following.
- Investigate the MPCC algorithm for online optimization.
- Develop simulation platform in Matlab for real-time control of micro car racing.
- Implement the MPCC algorithm in C++ (optional).
- Implement the control policy on physical racetrack.
Professor: Colin Jones
Type of project: Semester
Assistant: Ye Pu
Student: Lorenz Leimgruber
K023—————————————————————————————-
 Control of a laser beam stabilization system
Control of a laser beam stabilization system
Laser beam stabilization is a technology frequently used in aerospace, in manufacturing equipment such as semiconductor inspection or materials processing, and in biomedical systems. All these applications require precise mechanical alignment free of annoying effects like vibrations introduced by nearby mechanical components (e.g., fans). To address this issue, stabilization systems are required to simultaneously manage both large-angle/low- frequency, and small-angle/high-frequency corrections. Applying this technology will also result in improved performances (and life cycles) of system components, like bearings, motors and sensors.
The goal of this project is to design a simple controller for the system. The controller should minimize the effect of disturbance on the system. Then, the controller is applied on a real experimental setup including a single-axis, fast-voice steering mirror and a high-resolution position-sensing detector (PSD).
MER: Alireza Karimi
Type of project: Semester
Assistant: Mahdieh Sadabadi
Student: Yixin Bai