Denis Gillet, Hajir Roozbehani, Sylvain Rudaz
Overview
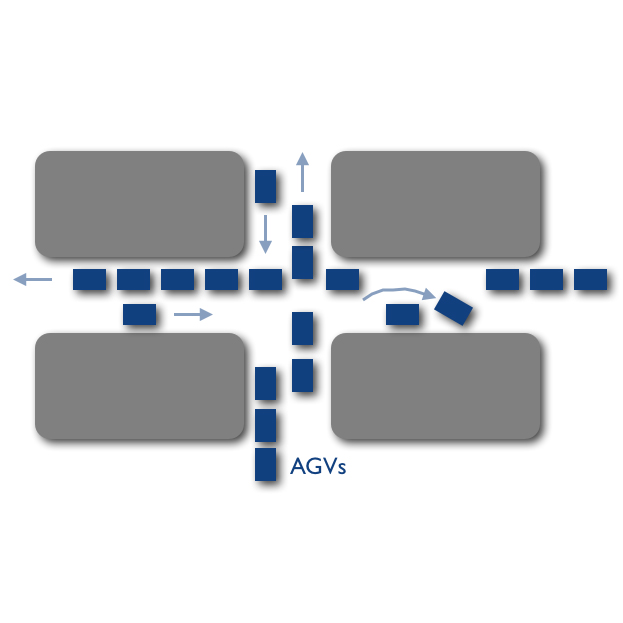
Electric Automated Guided Vehicles (AGVs) operating on roads have a high potential for reducing CO2 emissions and traffic congestion in intermodality areas. However and despite years of research and development, actual deployment is still limited. In this project innovative solutions are investigated for overcoming limiting factors, especially those related to platooning, overtaking, crossing, and energy supply. Advanced maneuvering solutions relying on hierarchical control structures and dynamical optimization will lead to an increase in vehicle density and speed.
Keywords : Intelligent Transportation Systems; Autonomous Agents; Automated Guided Vehicles;
![]()
![]()
![]()
|
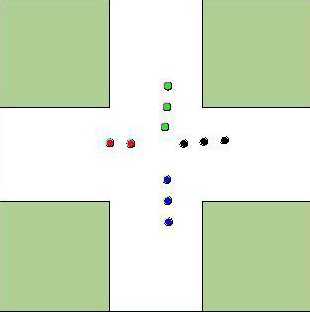
Platoon
|
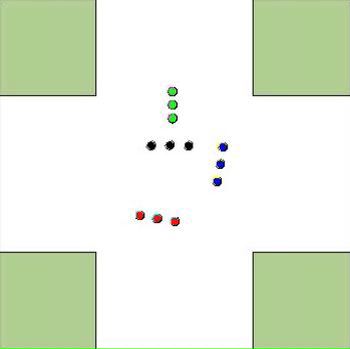
Platoon Planner
|
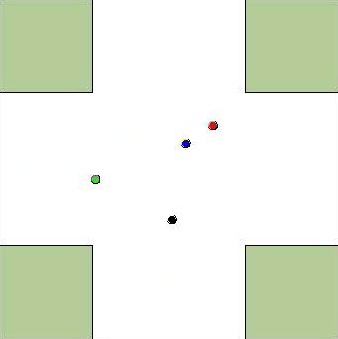
Continuous Planning
|
Related publications
[epfl_infoscience url=”https://infoscience.epfl.ch/publication-exports/2867/”]