B010——————————————————————————–
Controller identification for a flexible arm
The flexible arm considered in this project is a relatively high-order system. A low-order controller will necessarily lead to approximations limiting the performance. The goal of this project is to design a high performance fixed-order controller for this system using a direct model-matching ‘controller identification’ technique. The performance achieved by the designed controller will then be verified experimentally.
The project will include all basic controller design steps as encountered in the general control problem: system identification, system analysis, controller design and validation both in simulation (Matlab) and experimentally.
Professor: Dominique Bonvin
Type of project: Semester
Assistants: Klaske Van Heusden and Alireza Karimi
Student: Alain Bock
B016———————————————————————————
Design of a new measurement setup for a magnetic levitation system
The magnetic levitation system available at the LA offers an interesting case study for many controller design methods. It consists of a coil providing the magnetic force, a metal ball which is to be levitated and a light sensitive sensor which measures the position of the ball. It is nonlinear and unstable in open loop.
Currently, the system is not used as a regular case study mainly because the sensor is very sensitive to disturbances. The goal of this project is to study the limitations of the hardware of this system by quantifying the precision of the measurements, studying the repeatability and proposing new hardware or sensor to improve the performance.
The experiments quantifying the performance require system stability. The project will therefore start with the basic control steps: modeling and (PID) controller design, both in simulation (Matlab) and experimentally. If time permits, suggestions to change the hardware will be tested.
Professor: Dominique Bonvin
Type of project: Semester
Assistants: Klaske Van Heusden and Alireza Karimi
Student: Nicolas Stoudmann
L012———————————————————————————

Robust RST controller for a flexible transmission system
Robust control of a flexible transmission is considered. The system consists of three horizontal pulleys connected by two elastic belts. The first pulley is driven by a DC motor and the output is the position of the third pulley measured by a position sensor. The third pulley may be loaded with different weight.
Robust controllers are designed to meet the performance for a set of models. This type of controllers can be applied to nonlinear systems linearized at different operating points, to time-varying systems as well as to systems with parametric uncertainty. An approach to robust control design is to cast the problem into a convex optimization problem which can be solved efficiently using the numerical methods.
The objective is to design a robust controller that stabilizes all possible configurations of the flexible transmission and satisfies some performance specifications (rise time, overshoot, modulus margin, delay margin etc) using a design method developed at LA. The method is based on open-loop shaping in the frequency domain using a set of non-parametric models.
Model identification will first be carried out for different loads in the third pulley. Then, the method will be used to design a controller metting the specifications. This controller will be implemented.
Professor: Roland Longchamp
Type of project: Semester
Assistants: Marc Kunze and Gorka Galdos and Alireza Karimi
Student: Hamed Shisheh Foroush
L016———————————————————————————

Control of a grinding machine
One of the railroad maintenance operations is to improve the profile of the rail with a grinding machine. This operation reduces noise and vibration transmitted to train and residences next to the railway. Rail grinding is carried out by a special train equipped with several grinding stones which are set at different angles and rotate whilst the train is moved along.
A grinding stone rotates by an asynchronous motor and should apply a constant force on the surface of rail. The applied force is controlled by a pneumatic jack using a PI controller. The grinding stone should be moved up and down when there is an obstacle on the railway (e.g. a level crossing).
During a semester project a model for the system has been developed. The objective of this project is to validate this model for different slopes and thickness of the grinding stone and to design a controller for fast response of the closed-loop system in face of obstacles on the railway. Several types of controllers from simple PID controller to robust and gain-scheduled RST controller will be designed and applied to a pilot plant available for this project.
This project is proposed in collaboration with Scheuchzer Ltd, 1030 Bussigny, Switzerland, one of the leaders in rail grinding.
Professor: Roland Longchamp
Type of project: Master
Assistants: Gorka Galdos and Alireza Karimi
Student: Aurel de Bosset
L018———————————————————————————

Modeling and optimizing of a trebuchet
Introduced in the 7th century, the trebuchet was a medieval siege war machine capable of throwing 100kg stones over 200m distance by the sole mean of articulated arms and and counterweight.
Finding the optimal weights and arm-lengths maximizing the energy transfer between the ‘falling’ counterweight and the projectile, while keeping the launch angle correct is not a trivial task. Dynamically, when the stone leaves the ground, the trebuchet becomes a double pendulum; that is, a chaotic system. This type of system can be challenging to optimize due to the sensitivity to initial conditions and optimization parameters.
The goal of this project is to model the dynamics of the machine and apply various numerical optimization techniques on the simulated system in order to maximize the throwing distance. Various configurations may also be investigated like fixed vs moving frame. Prerequisite: Interest in analytical (Lagrangian) dynamics, modeling and simulation. MATLAB.
Professor : Roland Longchamp
Type of project: Semester
Assistants: Basile Graf and Philippe Müllhaupt
Student: David Ingram
L019——————————————————————————–
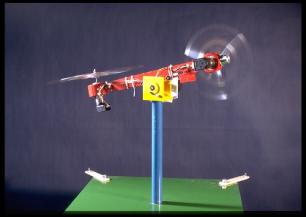
Interfacing the Toycopter
The Toycopter is a setup closely resembling a helicopter. The principal difference lies in the manner in which the aerodynamical lift is changed. For the Toycopter, the propeller velocities are changed so as to vary the aerodynamical lift. The main drawback is that classical robotic control strategies are unsuited, since they have the tendency of inverting the input-output behavior, thus resulting in unstable dynamics.
The aim of this project is to update the existing controller to the new LabVIEW real-time environment developed at the LA.
Tools to be used: LabVIEW
Professor : Roland Longchamp
Type of project: Semester
Assistants: Basile Graf and Philippe Müllhaupt
Student: Nicolas Yoakim
L023———————————————————————————
Low-order controller design for a torsional system
Low-order controllers are preferred to high-order controllers because they have less computational and numerical problems in implementation. However, the classical controller design methods lead to high-order controllers for high-order plant models. It turns out that the design of an optimal low-order controller for an high-order model is not numerically tractable. Therefore, in control system engineering, there is a great desire to develop a suboptimal, but tractable design method for low-order controller design.
The goal of this project is to compare three different approaches to low-order controller design and applying them to the torsional system, shown in the figure. The first approach is to use an order reduction technique to reduce the order of the high-order controller. The second one is to reduce the model order and then to compute a low-order controller based on the reduced order model. The third method has been recently developed and is based on the rank minimization of the Sylvester matrix of the controller [1].
Professor: Roland Longchamp
Type of project: Master
Assistants: Hamid Khatibi and Alireza Karimi
Student: Ahmed Slama
G031——————————————————————————–
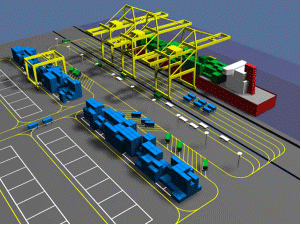
Crossing strategies for multi-agent systems
The Laboratoire d’Automatique is collaborating with the Numexia Company to develop the next generation of Automated Guided Vehicles (AGVs) for transshipment at container terminals.
The goal of this project is to simulate cooperative versus competitive crossing strategies for multi-agent systems.
MER : Denis Gillet
Type of project: Semester
Assistant: Sylvain Rudaz
Student: Claire Verburgh
G032——————————————————————————–
Control of a reduced-scale automated guided vehicles
The Laboratoire d’Automatique is collaborating with the Numexia Company to develop the next generation of Automated Guided Vehicles (AGVs) for transshipment at container terminals.
The LA developed a reduced-scale AGV using four e-puck mobile robots constituting the four steering axles.
The goal of the project is to develop different path planning methods in simulation with a possible implementation on the μAGV. To perform this objective, the position of the μAGV in its environment has to be known using measures of embedded and global sensors.
MER : Denis Gillet
Type of project: Semester
Assistant: Sylvain Rudaz
Student: Loic Alexandre
G033——————————————————————————–
Decentralized Path Planning and Control of a Platoon of Autonomous Vehicles
The Laboratoire d’Automatique is collaborating with the Numexia Company to develop the next generation of Automated Guided Vehicles (AGVs) for transshipment at container terminals.
An approach to real-time trajectory generation for platoons of autonomous vehicles will be developed. The partially decentralized structure will permit each vehicle to independently compute its trajectory in real-time using only locally generated information.
MER : Denis Gillet
Type of project: Semester
Assistant: Sylvain Rudaz
Student: Hajir Roozbehani
G034——————————————————————————–

Trajectory planification and control of a redundant serial manipulator
Nowadays, industrial application need high-resolution and fast-positioning manipulators with large workspaces. In this context, the combination of a fast and fine positioning prismatic joint at the output of a traditional 3R positioning manipulator is very interesting, since it combines both advantages. Thus, the proposed project is three-fold:
– Elaboration of a kinematic model of the redundant manipulator.
– Elaboration of an optimal joint trajectory planification, avoiding saturation.
– Elaboration of an obstacle avoidance algorithm (Master project only.
MER : Denis Gillet
Type of project: Master
Assistants: Yvan Michellod and Philippe Mullhaupt
Student: Jonathan Lugon
G035——————————————————————————–
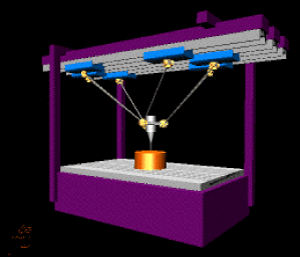
Modeling, visual representation and control of a parallel manipulator
Parallel manipulators exhibit simultaneously important characteristics such as high precision, high load capacity and high rigidity, which make them very interesting for industrial applications.
Despite these clear advantages, the control of parallel robot has always been challenging. Issues such as reduced workspace, singular configurations and highly non-linear dynamics are very difficult to handle. Thus, the proposed project has three main parts:
-Elaboration of the dynamic model of a particular parallel-redundant manipulator.
-3D representation (with Matlab©) of the considered system for simulation purposes.
-Design of a dedicated controller to realize perfect 3D trajectory tracking of the output.
MER : Denis Gillet
Type of project: Semester
Assistants: Yvan Michellod and Philippe Mullhaupt
Student: Fabien Fellay
G042——————————————————————————–

An eLogbook augmented forum
eLogbook is a Web 2.0 social software developed at the EPFL. It can simultaneously serve as an activity management, a social networking and a resources sharing system. Feedback received from communities using eLogbook and other collaborative environment report that their members prefer to conduct their different collaborative activities through one single environment.
This project consists of designing and implementing a forum within eLogbook. This will pave the way for community members to exchange discussions in the same environment in which their tasks are managed, their community is structured and their resources shared. The forum is also expected to motivate contribution and sustain collaboration. Therefore, it has to be augmented by different types of awareness, such as highlighting most popular topics, most active participants, and most recent posts.
MER : Denis Gillet
Type of project: Semester
Assistant: Sandy El Helou
Student: Peter Oberhauser
G039——————————————————————————–
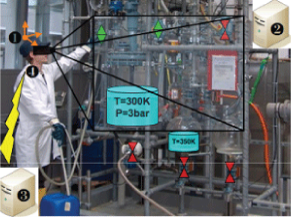
Development of an augmented reality system
Augmented Reality (AR) technology enhances the user vision by overlaying the real world image with a 3D computer-generated graphics, generally rendered in a Head Mounted Display (HMD). The exact position of the user’s head must measured using a tracking system in order to display virtual objects at the correct position. The goal of this project is to develop an AR system for an operator supervising a chemical plant that enforces the Quality of perception, especially when the operator is quickly moving the head.
MER : Denis Gillet
Type of project: Semester
Assistant: Damien Perritaz
Student: Florian Abbet
G040——————————————————————————–
System engineering for a unicycle robot
The Laboratoire d’Automatique is developing an autonomous unicycle robot. The system is supposed to stay on vertical position on its single wheel and move along paths. Preliminary studies have been performed in previous projects. The dynamics has been modeled and controllers have already been developed.
The goal of this project is to choose the actuators and the sensors in order to build the unicycle. Observability issues related to the precision of the sensors must be specially studied.
MER : Denis Gillet
Type of project: Semester
Assistants: Damien Perritaz and Yvan Michellod and Sylvain Rudaz
Student: Arnaud Moretti