Integrated actuators – Prof. Y. Perriard
Note: Projects are intended for Microengineering, Electrical Engineering, Computer Science and Mechanical Engineering sections.
For information and registrations contact:
- Prof. Yves Perriard at: [email protected]
- Paolo Germano at: [email protected]
For opportunities to carry out a Master Project in foreign academic institutions or with one of our Swiss industrial partners, please contact Prof. Y. Perriard.
Transportation fees between EPFL and Neuchâtel will be covered.
- Project # 1 – Control of a Soft Biomimetic Fish Robot
- Markus Koenigsdorff, Andres Osorio Salazar
Soft robotics provides a promising approach for underwater exploration by enabling devices that replicate the fluid movements of aquatic life. Dielectric Elastomer Actuators (DEAs) are well-suited for this application due to their high energy density, fast strain rate, and silent operation. Within this project, you will work on a robotic fish that utilizes fiber-reinforced uniaxial DEAs coupled with a pre-compressed buckling beam. This design results in a highly compliant robot capable of large-amplitude fin displacements.
The aim of the project is to implement a control algorithm for the positioning of the caudal fin to enable both the steering and speed control of a future untethered version of the robot.
As part of this project, you will:
Conduct a comprehensive state-of-the-art review on control algorithms for multi-stable systems
Implement a controller to position the caudal fin and regulate the speed of the robot
Integrate the developed controller with the physical hardware to create a working demonstrator
References:
A Soft Robotic Fish with a Dielectric Elastomer Actuator Body and Negative Stiffness Spine. Markus Koenigsdorff, Simon Holzer, Stefania Konstantinidi, Yoan Civet, Yves Perriard, Advanced Robotics Research2026, 0, e202500173. https://doi.org/10.1002/adrr.202500173
Supplementary video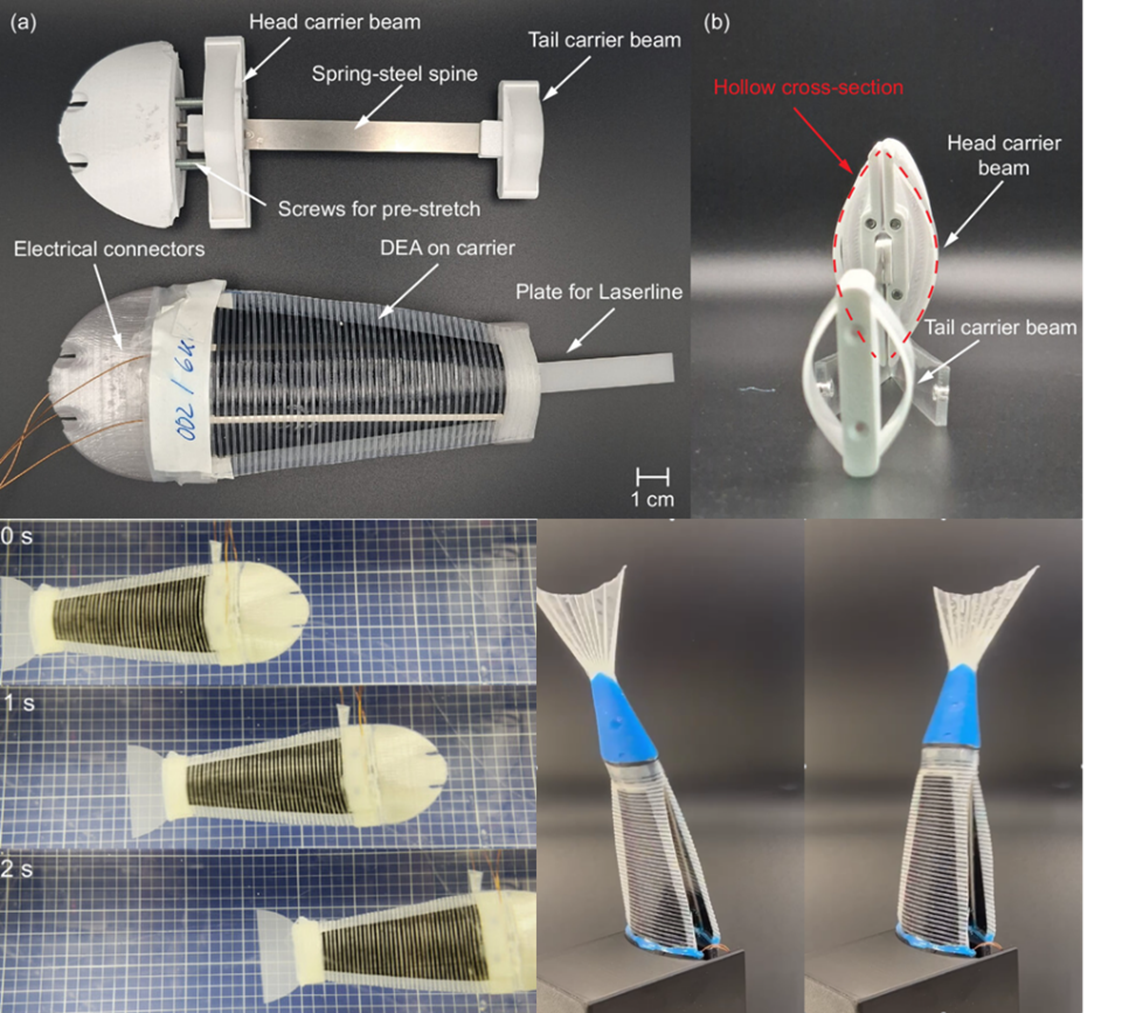
. - Project # 2 – Smart Actuators: Exploring Ultrasonic Vibration Sources
- Xinxin Liao, Zhanghao Huang
Motivation
Many advanced industrial and medical systems rely on instruments operating in confined, hard‑to‑access environments. One way to make clinicians’ lives easier is to use and optimize smart materials. They offer unique opportunities to generate high‑frequency, high‑precision vibrations in compact designs. However, designing actuators that are small, efficient, thermally stable, and well‑matched to mechanical loads remains a key engineering challenge.
Project Description
This semester project, conducted in collaboration with a dental industry partner, focuses on the core actuation unit of a medical device. The main objective is to explore, design, and evaluate compact actuators based on smart materials, such as piezoelectric and magnetostrictive materials (Fig. 1). A proof-of-concept setup that uses these smart materials to generate the required dynamic vibration in a representative environment will be built, followed by comprehensive experimental characterization.
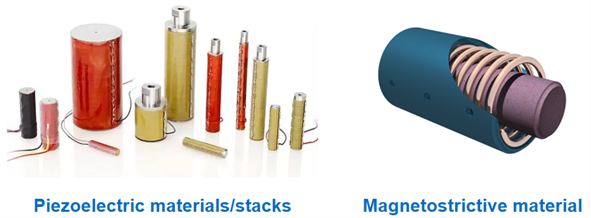
Fig. 1 Smart materials and actuators
What you will do
– Brief overview of smart-material-based actuators suitable for compact medical applications.
– Model, design and build a simplified experimental prototype.
– Experimentally characterize the mechanical performance, specifically measuring the frequency, amplitude, and temperature variation.
What makes you qualified
– Subjects: Microengineering, Mechanical Engineering, Instrument Science or a related field.
– Interests: Actuators, smart materials, simulation and hands-on experimental lab work.
– No prior deep knowledge in dentistry is required.
Why this project is interesting
– Hands‑on work with advanced actuator technologies
– Balance between theory, design, and experimentation
– Exposure to real industrial R&D challenges
– Results applicable to multiple high‑tech domains
. - Project # 3 – Characterization of a miniaturized actuation module used in biomedical applications
- Maël Dagon, Federico Reato
Context
Diabetic patients often suffer from peripheral neuropathy, which causes foot insensitivity leading to high plantar pressure points (HPP). HPP can lead to ulcers and potentially amputations. To redistribute plantar pressure, we developed a reconfigurable insole containing matrices of reconfigurable modules.
Objective
Each module is actuated by a permanent-magnets miniature core-less DC motor and can move vertically over a range of approximately 5 mm. The project focuses on the experimental characterization and numerical modelling of the actuation unit, comprising the motor and the gear train. The motor will be fully characterized by identifying its lumped parameters through a combination of experimental testing and numerical methods. The resulting lumped-parameter analytical model will then be used to estimate the device’s energy consumption and to support the development of the control and sensing algorithms.
Content of the project
Characterization of a miniature coreless DC motor and gear train: Experimental investigation combined with numerical methods for the identification of electro-mechanical parameters.
Development and validation of a DC motor analytical model: Analytical simulation of the motor behaviour and experimental validation based on voltage and current consumption measurements.
Firmware optimization: Experimental optimization of parameters of a commercial ripple counting DC motor driver.
Profile
Type of work: 10% theory / 40% Modeling / 30% experiments / 20% firmware
– Knowledge motor physics and control electronics
– Good knowledge of programming and engineering tools: Python, Matlab, Simulink, 3D CAD
– Ability to work autonomously
– Ability to setup and conduct relevant experimental tests
– Ideally experience with STM32 architecture
Figure 1 Exploded view of a commercial motor
. - Project # 4 – Investigation of auxetic meta-structures for intelligent offloading footwear
- Maël Dagon, Federico Reato
Context
Diabetic patients frequently develop peripheral neuropathy, resulting in reduced foot sensitivity and the formation of localized high plantar pressure (HPP) areas. These pressure concentrations significantly increase the risk of foot ulcers and may ultimately lead to amputation. To address this issue, we developed a reconfigurable insole composed of arrays of adjustable modules, coupled through an interpolating auxetic surface to enable smooth plantar pressure redistribution.
Objective
During the daily life of a diabetic patient, sub‑plantar load distribution changes throughout the day, often generating areas of elevated peak plantar pressure. To reduce and mitigate this phenomenon, an intelligent offloading footwear system has been developed. The device operates through a matrix of actuation modules that dynamically modulate the insole morphology to effectively redistribute sub‑plantar loads. To minimize the number of actuators needed and prevent localized spots of pressure concentrations, an interpolated surface constrained by the actuators has been introduced, providing a continuous and compliant interface between the device and the diabetic patient’s foot. The project investigates a range of synclastic auxetic meta‑structures capable of generating double Gaussian curvature that can meet these design requirements, with the ultimate objective of identifying an optimal solution for this specific application.
Content of the project
Characterization of auxetic meta‑structures for synclastic applications: Development of a Python‑based tool for preliminary auxetic unit‑cell design and mechanical characterization.
Validation of auxetic cell models: Experimental testing on a dedicated test bench to validate the auxetic behaviour of the selected surface configurations.
Prototype manufacturing: Fabrication of multiple prototypes using different materials and manufacturing techniques, including 3D printing, moulding processes, and laser cutting.
Profile
Type of work: 10% theory / 40% Modelling / 30% experiments / 20% firmware
– Knowledge of basics auxetic structure physics
– Good knowledge of programming and engineering tools: Python, Matlab, 3D CAD
– Ability to work autonomously
– Ability to setup and conduct relevant experimental tests
– Ideally experience with manufacturing techniques (some of these) 3D printing, moulding processes, and laser cutting
Figure 1 Auxetic meta-structure for Intelligent Offloading Footwear
. - Project # 5 – Multilayer Dielectric Elastomer Actuators for Intelligent Pressure Offloading in Diabetic Footwear
- Amine Benouhiba, Maël Dagon, Andres Osorio Salazar
Why This Project Matters
Every 20 seconds, a person with diabetes undergoes a lower-limb amputation somewhere in the world, most often due to foot ulcers caused by excessive plantar pressure. Intelligent offloading footwear aims to prevent these ulcers by dynamically redistributing pressure away from high-risk regions of the foot.
One promising technology for achieving this is the dielectric elastomer actuator (DEA): a soft, lightweight artificial muscle capable of changing shape and stiffness when electrically activated. In this project, we explore a new type of multilayer DEA architecture designed to provide controllable rigidity changes for smart pressure redistribution inside footwear.
Project Overview
Our research group is developing compact soft-actuation systems. This project focuses on the design and fabrication of multilayer dielectric elastomer actuators, consisting of multiple stacked active and passive layers, to achieve the large displacement output and stiffness modulation required for plantar pressure offloading applications.
The project combines soft robotics, advanced materials, electronics, and biomedical engineering. The student will contribute to the construction and evaluation of multilayer DEA structures, investigate fabrication challenges such as layer uniformity and electrical reliability, and characterize the actuator’s mechanical behavior under compression and cyclic loading.
This work contributes directly to the development of next-generation adaptive insoles capable of actively redistributing pressure in real time.
What You Will Do
– Fabricate and assemble multilayer dielectric elastomer actuators with high layer counts (~100 layers).
– Develop manufacturing methods for thin elastomer films and compliant electrodes.
– Design and build experimental setups for actuator characterization.
– Measure actuator displacement, stiffness variation, force output, and reliability.
– Investigate failure mechanisms such as dielectric breakdown, delamination, or viscoelastic drift.
– Analyze experimental results and optimize actuator performance for wearable medical applications.
– Present your results in a final presentation and scientific-style report.
Who Should Apply
This project is ideal for students interested in:
– Soft robotics and artificial muscles
– Biomedical engineering
– Smart materials and flexible electronics
– Mechatronics and actuator systems
– Wearable medical technologies
Helpful skills (but not required):
– Basic electronics or high-voltage systems
– Mechanical design or prototyping
– Experimental testing and data analysis
– Curiosity and motivation to work on multidisciplinary research problems
– Students from different engineering backgrounds are encouraged to apply.
What You Will Gain
By joining this project, you will gain:
– Hands-on experience with soft actuator fabrication and characterization
– Exposure to advanced smart materials and multilayer manufacturing techniques
– Practical skills in experimental mechanics, electronics, and biomedical system integration
– Experience working on a cutting-edge research topic with real healthcare impact
– A strong research and engineering project for your CV or future graduate studies
Interested?
Join us in developing soft robotic technologies that could help prevent diabetic foot ulcers and improve patients’ quality of life through intelligent wearable systems.
. - Project # 6 – Soft Fluidic Memory Sensor for Intelligent Offloading Footwear
- Maël Dagon, Andres Osorio Salazar
Why This Project Matters
People with diabetes can develop foot ulcers when specific regions of the foot are exposed to excessive pressure, shear, or repeated mechanical loading. Most wearable sensing systems mainly measure the load applied at a given instant, but tissue damage is also influenced by how loading evolves and accumulates over time.
This project explores an early-stage soft sensing concept for future intelligent footwear. The long-term goal is to develop sensing layers that can provide richer information about plantar loading and help smart offloading systems reduce the risk of ulcer formation.
Project Overview
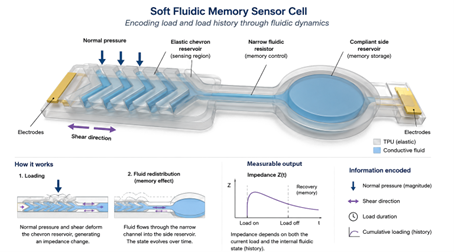
Our research group is developing intelligent offloading footwear for diabetic foot ulcer prevention. This semester project will focus on the first experimental validation of a soft fluidic sensing element that combines mechanical deformation, conductive fluid, and electrical impedance measurement.
The sensor concept is based on a flexible polymer structure containing small fluidic features filled with a conductive medium. When the structure is compressed or deformed, the internal fluid distribution and electrical pathway change, producing a measurable electrical response. Some prototype variations will also include simple fluidic features intended to influence the transient response of the sensor, allowing us to investigate whether the device response depends only on the current load or also on the recent loading history.
The central question is:
Can a soft fluidic sensing element produce a measurable and repeatable electrical response under controlled mechanical loading, and can simple design variations influence its transient behavior?
What You Will Do
– Fabricate simple soft fluidic sensor prototypes using flexible polymer films, conductive fluids, and electrode connections.
– Test basic fabrication steps such as sealing, filling, bubble control, and electrical interfacing.
– Measure the impedance response of the prototypes under controlled compression and release.
– Compare a small number of design variations, such as different fluidic path geometries or reservoir dimensions.
– Evaluate basic sensor behavior, including signal amplitude, repeatability, drift, recovery, and sensitivity to fabrication defects.
– Identify practical limitations such as leakage, trapped bubbles, unstable electrodes, weak signals, or mechanical damage.
– Analyze the experimental data using MATLAB, Python, or similar tools.
– Prepare a concise scientific report and final presentation summarizing the design, experiments, results, and recommendations.
Who Should Apply
This project is ideal for students interested in:
– Soft sensors and wearable systems
– Experimental prototyping
– Smart materials and flexible structures
– Electronics and impedance-based sensing
– Data analysis using MATLAB or Python
Helpful skills, but not required:
– Basic CAD design, hands-on fabrication, simple electronics, mechanical testing, or experience with data processing.
– The most important qualities are curiosity, careful experimental work, and motivation to contribute to an early-stage research idea.
What You Will Gain
By completing this project, you will gain:
– Hands-on experience with soft sensor fabrication and characterization
– Practical exposure to flexible materials, conductive fluids, and impedance-based measurements
– Experience designing and evaluating early-stage biomedical device prototypes
– Skills in interpreting experimental data, transient responses, and failure modes
– Insight into how new sensing technologies can support intelligent wearable medical systems
Interested?
Join us in developing soft robotic technologies that could help prevent diabetic foot ulcers and improve patients’ quality of life through intelligent wearable systems.
. - Project # 7 – Self-Clearing Carbon Black Electrodes for Durable Soft Cardiac Actuators
- Amine Benouhiba, Julia Platz, Armando Walter
Motivation
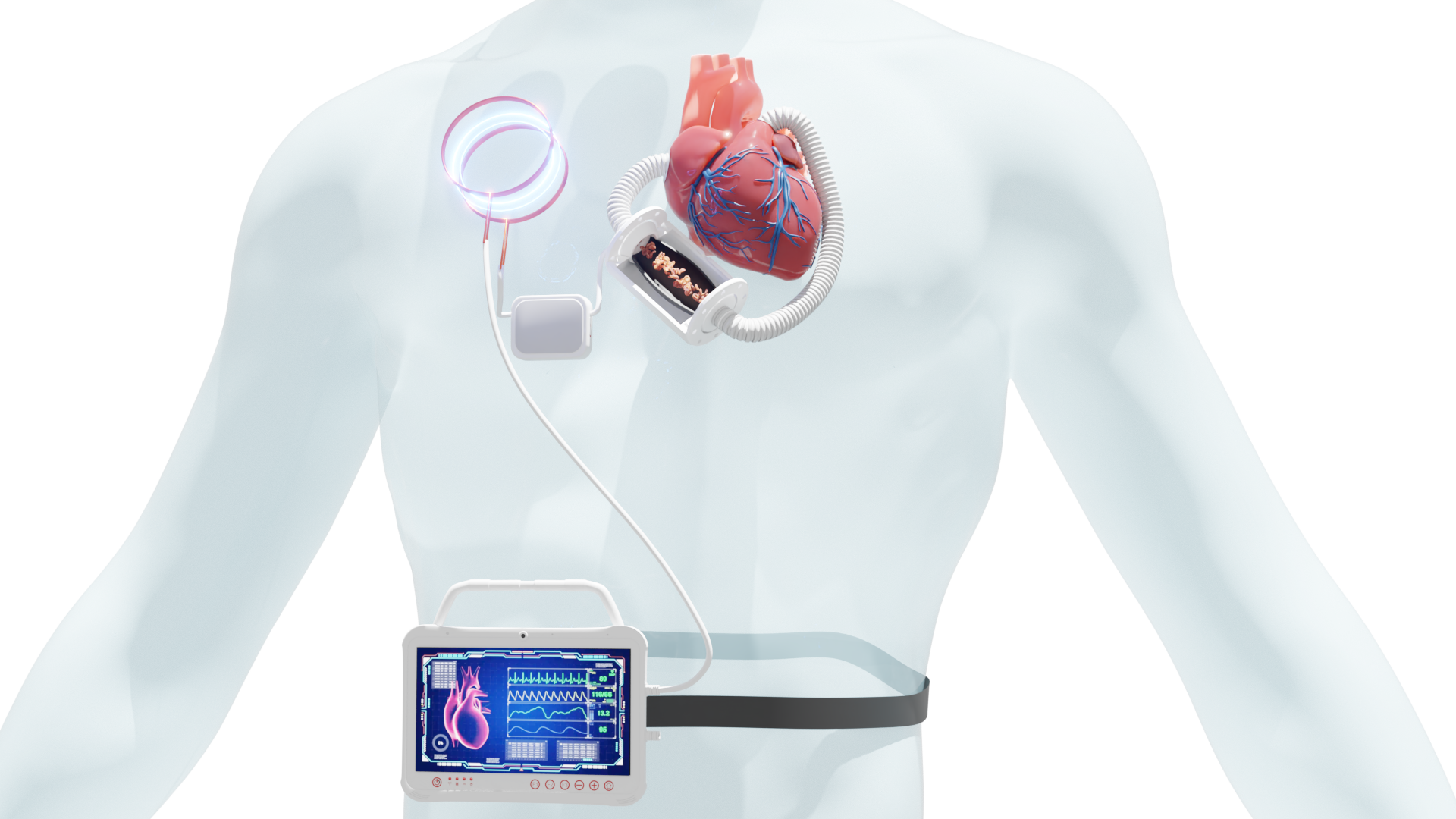
Soft robotic heart assist devices are emerging as a radically new approach for treating cardiovascular diseases. Unlike conventional rigid pumps, dielectric elastomer actuators can generate lightweight, compliant, and biomimetic motion that mimics the natural beating of the heart [1,2]. However, one of the key limitations preventing long-term operation is the electrode layer, which progressively degrades under high-voltage actuation.
This project explores ultra-thin self-clearing carbon black electrodes capable of surviving electrical breakdown while maintaining performance over millions of cycles. The work combines soft robotics, high-voltage electroactive polymers, and biomedical engineering, offering hands-on experience in developing next-generation soft cardiac technologies.
Tasks
The student will investigate the composition of compliant carbon black electrodes for dielectric elastomer actuators. Different formulations will be prepared by varying carbon black concentration and deposition parameters. The electrodes will be experimentally characterized in terms of conductivity, thickness, adhesion, stretchability, and cyclic stability. The project will also evaluate self-clearing behavior during repeated high-voltage actuation and electrical breakdown events.
Skills
The project is suited for students interested in soft robotics, electroactive polymers, materials, and biomedical devices. Laboratory experience and data analysis skills are recommended.
References
[1] Benouhiba, Walter, Jahren et al., Soft Beats: A Dielectric Elastomer-Based Ventricular Assist Device for Next-Gen Heart Failure Management, Advanced Engineering Materials, 2025.
[2] Benouhiba, Jahren, Walter et al., Vacuum-enhanced dielectric elastomer counterpulsation for in-vivo diastolic augmentation, Materials Today Advances, 2026.
. - Project # 8 – Bidirectional Flyback converter for high voltage applications
- Maribel Caceres Rivera
The flyback converter is a DC‑DC topology capable of stepping voltages up from just a few volts to the kilovolt range. This topology has already been explored in a previous project, where a student‑designed unidirectional converter was developed to reach 2.5 kV for powering a Dielectric Elastomer Actuator (DEA). Because DEAs allow partial energy recovery from the load, the main goal of the current project is to add and implement bidirectionality in the flyback converter. One of the key motivations for investigating such topologies is the potential to increase the overall efficiency of both the power electronics and the DEA system.
The main challenges associated with this topology arise from transformer parasitic and the limited availability of high‑voltage MOSFETs. Therefore, it is essential to carefully consider the difficulties related to simulation, implementation, and validation of the converter.
The DEA used as the load is primarily applied in medical devices, especially as an artificial muscle. It is important to note that when the device is actuated at high voltage, it undergoes mechanical deformation. As a consequence, its electrical parameters vary during operation, which must be taken into account in the design and control of the converter.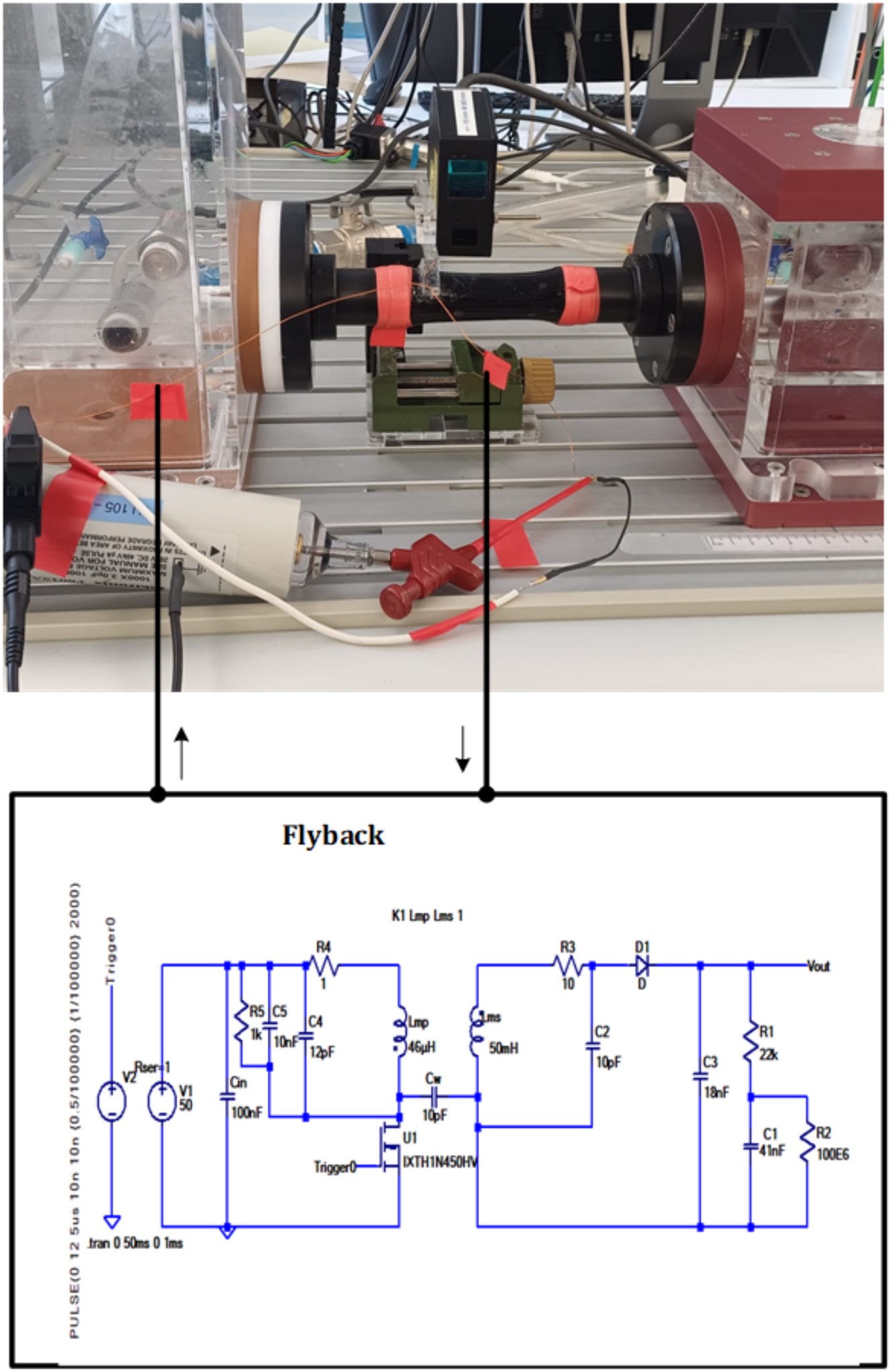
Project Tasks
– Gain familiarity with bidirectional topology and its operation in different modes according to the load.
– Consider the initial topology analysis and adapted to a bidirectional topology.
– Select and simulate the topology with appropriate components to minimize parasitic effects.
– Implement the topology to achieve high voltages on the order of kilovolts and recovery the charges from the load.
– Validate the final architecture by comparing the mathematical analysis and simulation results.
Skills
PCB design (Altium, Kicad, OrCAD…)
Simulation tools (LTSPICE, PSPICE or SPICE KEYSIGHT ). Preferable LTSPICE
References
[1] P. Thummala, Z. Zhang and M. A. E. Andersen, “High voltage Bi-directional flyback converter for capacitive actuator,” 2013 15th European Conference on Power Electronics and Applications (EPE), Lille, France, 2013, pp. 1-10, doi: 10.1109/EPE.2013.6634458.
. - Project # 9 – Self-sensing for artificial muscles
- Xiaohan Han
Project background
Dielectric elastomer actuators (DEAs) are a class of soft actuators composed of an electrically insulating polymer layer sandwiched between two flexible electrodes. It has been widely researched as promising candidates for artificial muscles. Additionally, DEAs can be modelled as compliant capacitors: their capacitance changes with deformation, allowing the actuator itself to act as a self-sensing element. In systems with multiple DEAs connected in parallel, differences in capacitance can be exploited to increase sensitivity and monitor the actuators’ state in real time.
Objectives
– Investigate the self-sensing capabilities of DEAs for real-time monitoring of actuator deformation.
– Explore parallel DEA configurations to enhance sensing sensitivity.
– Fabricate and characterize prototype DEAs to correlate electrical measurements with mechanical deformation.
Desired Skills
– Positive attitude with prototyping and fabrication of soft materials.
– Basic understanding of electronics and sensor measurement techniques.
– Data analysis skills (Python, MATLAB, or similar tools).
– Ability to communicate technical results clearly.
– Rigorous, detail-oriented, and independent working style, with patience and persistence in experimental work.
References
[1] S. Rosset, B. M. O’Brien, T. Gisby, D. Xu, H. R. Shea, and I. A. Anderson, “Self-sensing dielectric elastomer actuators in closed-loop operation,” Smart Materials and Structures, vol. 22, no. 10, Art. no. 104018, 2013, doi: 10.1088/0964-1726/22/10/104018.
. - Project # 10 – Origami\Kirigami as Negative Biasing Mechanism for Dielectric Elastomer Actuators
- Xiaohan Han
Project background
Dielectric elastomer actuators (DEAs) are high-performance soft actuators, but the generated strain depends heavily on the biasing system. Traditional biasing approaches include masses, springs, and negative bias springs. Kresling origami is a twisted folding pattern with unique bistable properties. This project investigates whether origami\kirigami can provide optimal pre-stretch for stack DEAs to achieve high strains.
Objectives
– Fabricate Origami/Kirigami structures using appropriate materials and integrate them with DEA prototypes.
– Characterize the achievable strain and actuation performance.
Desired skills
– Hands-on fabrication skills for creating auxetic kirigami structures and soft actuator prototypes.
– Experience with CAD software and COMSOL simulation.
– Proficiency in experimental design, data collection, and analysis.
– Strong presentation and communication skills.
References
[1] A. Rafsanjani and D. Pasini, “Bistable auxetic mechanical metamaterials inspired by ancient geometric motifs,” Extreme Mechanics Letters, vol. 9, part 2, pp. 291–296, 2016, doi: 10.1016/j.eml.2016.09.001.
[2] S. Konstantinidi, M. Koenigsdorff, P.-J. Martin, A. Benouhiba, Y. Civet, G. Gerlach, and Y. Perriard, “DEyeA: Artificial muscles for the restoration of eye blinking following facial paralysis,” Advanced Materials Technologies, 2025, doi: 10.1002/admt.202401616.
.
- Project # 11 – Dielectric Elastomer Actuators characterization
- Alexis Boegli, Paolo Germano, Julia Platz
Dielectric Elastomer Actuators (DEAs) are promising artificial muscles for demanding biomedical applications, including active cardiac assistance. Developed at CAM/LAI-EPFL, these tubular actuators are driven by voltages of several kilovolts and must be controlled with great precision to avoid destruction. However, their electrical modelling remains to date overly simplistic: the carbon electrodes, distributed along the entire length of the tube, give the actuator the behaviour of a distributed transmission line, which a lumped-element model cannot faithfully capture.
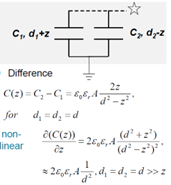
This project proposes an original approach to characterise DEAs as distributed electrical structures, based on transmission line theory. The method relies on impedance measurements performed with an impedance analyser, from which the distributed RLCG parameters (per-unit-length characteristics) of the tube can be extracted directly and rigorously. A validation measurement with a known load then confirms the relevance of the identified homogeneous line model.
The stakes go well beyond simple characterisation: an accurate distributed model opens the way to self-sensing, that is, the simultaneous use of the DEA as both an actuator and a sensor of its own mechanical deformation. To explore this, a mechanical setup will be built to apply controlled stresses to the tube — in the axial, radial and thickness directions (Δx, Δy, Δe) — while simultaneously measuring its impedance with a Z-meter. The goal is to establish how the distributed parameters, and in particular the capacitance C, evolve as a function of the mechanical state of the actuator: C(Δx, Δy, Δe) → C(Δ) → Z. This electromechanical mapping is the key to enabling self-sensing.
This project combines fabrication (in collaboration with the CAM cleanroom team), instrumentation and measurement automation, advanced physical modelling, and prospects for intelligent control applications. It is aimed at a student drawn to the interplay between materials physics, electronics and embedded systems, with a genuine opportunity to contribute to ongoing research in the laboratory.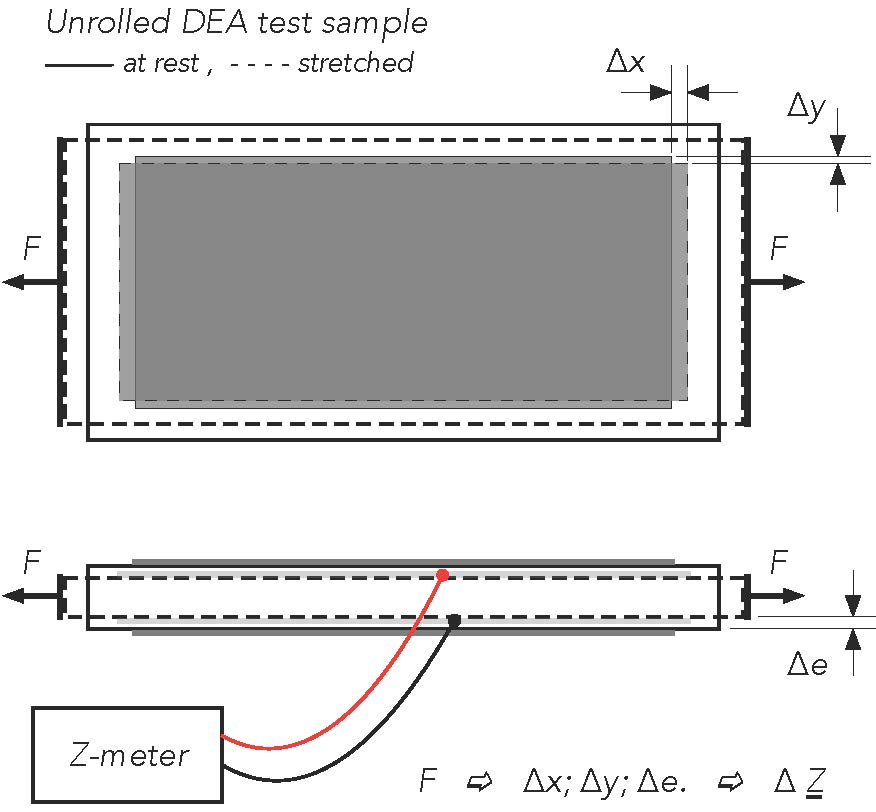
.