Linear electromechanical actuator with sensorless position control
Project in collaboration with a foreign industrial partner
Project description
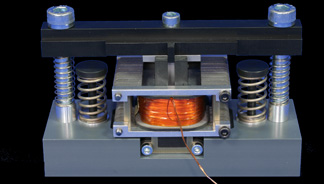
A linear electromechanical actuator is designed, capable of satisfying a desired profile of the mover position in function of time. The LAI developed its own optimization method in which the optimization constraints are critical points of the function position(time). The mover position is estimated by superposing an additional (scan) voltage to the main voltage used to power the coil, in order to achieve the sensorless position control.
Publications
Warning
Please note that the publication lists from Infoscience integrated into the EPFL website, lab or people pages are frozen following the launch of the new version of platform.
The owners of these pages are invited to recreate their publication list from Infoscience.
For any assistance, please consult the Infoscience help or contact support.
Sensorless Position Detection of a Linear Actuator