3D imaging has become a key sensing technology in a wide range of LiDAR (light detection and ranging) applications in the field of robotics, automotive, medical and spacecraft systems for their ranging and 3D-mapping capabilities. Particularly, D-TOF image sensors are utilized for their robustness in harsh environment conditions such as high background light (indoor and/or outdoor) and excessive rain, fog or snow. Simply put, D-TOF techniques provide 3D-depth maps by transmitting a pulsed light (typically, a laser) to a target and detecting the time-of-arrival of the reflected pulse by an appropriate photodetector and supporting electronics (Figure 1 shows a simple block diagram). The distance information is extracted by using the acquired timing data and the speed of light.
Fundamental requirements of a LiDAR sensor include providing high detectable ranges- from 4-10m in an indoor application, up to 200m in an automotive application and a few kms in space applications. Furthermore, the sensor also needs to provide high resolution imaging capabilities with millimetric precision, all under a wide range of environment conditions with high speed and accuracy. In addition to these requirements, the sensor also needs to comply with the eye-safety rules, which in turn dictates the maximum permissible power on the laser being used, and hence also influences the maximum measurable distance. Although, this limitation can be circumvented to an extent by using scanning LiDAR systems [1], [2] which can provide higher laser intensity and achievable SNR (signal-to-noise ratio), they however, require more mechanical parts, also increasing costs. Flash LiDAR is an alternative solution to providing 3D imaging with high spatial resolution and a simple mechanical system, but, with a lower SNR compared to a scanning LiDAR.
The objective of this project is to design a D-TOF sensor capable of operating in a robust environment (as described above) where, Geiger-mode single-photon avalanche diodes (SPADs) will be used as photodetectors for their intrinsically fast timing response, providing picosecond timing resolution and single-photon sensitivity, required for 3D imaging. CMOS based time-to-digital converters (TDCs) are used to measure the time between the incident and the reflected photons (ΔT, Figure 1). The on-chip processing unit provides simultaneous photon-counting information, thus improving the quality of the reconstructed image. Additionally, 3D stacked technology is used which enables increased sensor functionality. A prototype sensor has been designed and tested for single-point distances up to 430m with high-resolution 3D images obtained up to 4m within a scanning LiDAR system. Additionally, robustness to laser interference has also been demonstrated, ensuring operation in a multi-LiDAR environment [2]. A new sensor is being developed, with a focus on providing a flash LiDAR solution with improved resolution at higher operational distances with on-chip data processing functionality, while ensuring high data throughput.
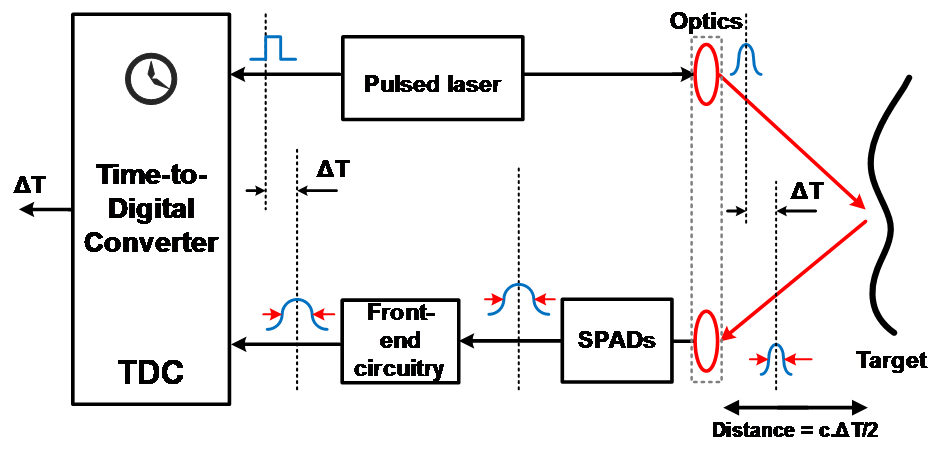
Figure 1- Simplified block diagram of a D-TOF LiDAR system
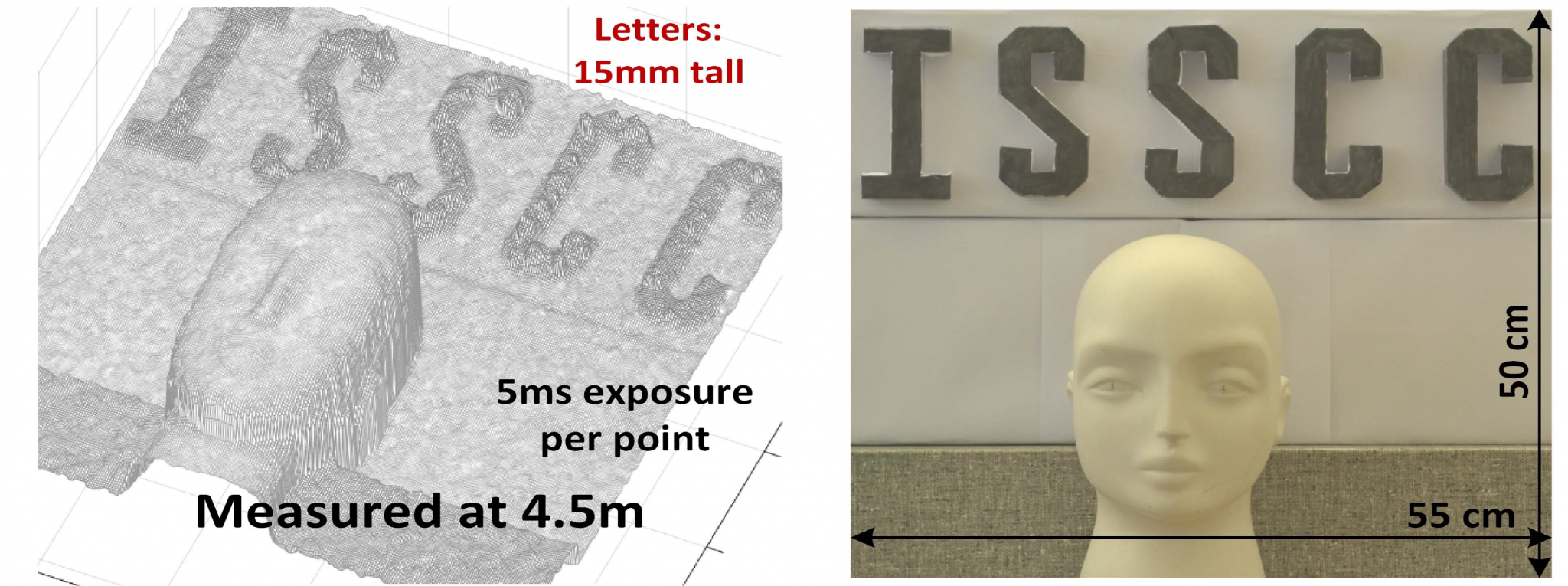
Figure 2- 3D reconstruction using the prototype sensor in a dual-axis scanner system [2]
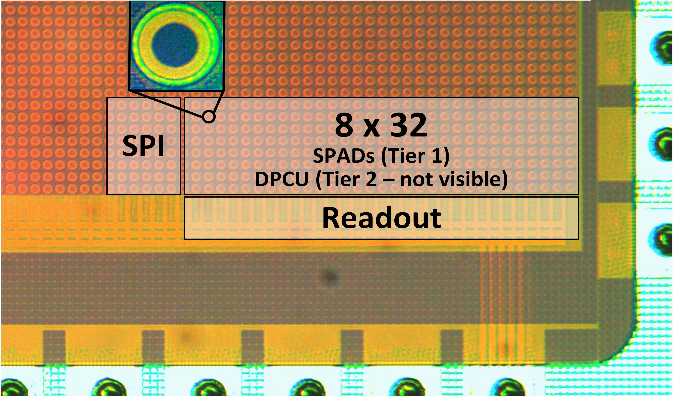
Figure 3- Chip micrograph of prototype sensor- 3D stacked 45nm/65nm CMOS technology; top tier- SPADs, bottom tier- electronics (not visible in the micrograph) [2]
Relevant Publications
- Niclass, C., et al., “A 100-m Range 10-Frame/s 340×96-Pixel Time-of-Flight Depth Sensor in 0.18-μm CMOS”, IEEE J. Solid-State Circuits, vol. 48, no. 2, pp. 559-572, Feb. 2013.
- Ximenes, A.R.; Padmanabhan, P.; Lee, M.J.; Yamashita, Y.; Yaung, D.; Charbon, E. “A 256 x 256 45/65nm 3D-stacked SPAD-based direct TOF image sensor for LiDAR applications with optical polar modulation for up to 18.6 dB interference suppression”, IEEE Int. Solid-State Circuits Conf. (ISSCC) Dig. Tech. Papers. IEEE, 2018, pp. 96–98.
- Perenzoni, M., et al., “A 64×64-Pixel Digital Silicon Photomultiplier Direct ToF Sensor with 100MPhotons/s/pixel Background Rejection and Imaging/Altimeter Mode with 0.14% Precision up to 6km for Spacecraft Navigation and Landing”, IEEE J. Solid-State Circuits, vol. 52, no. 1, pp. 151-160, Jan. 2017.