Autonomous underwater vehicles and gliders for fine-scale measurements in natural waters (such as Slocum Glider) to investigate fine-scale spatial structures of natural waters / lakes.
New advanced platforms, such as autonomous underwater vehicles and gliders have enabled research on lateral variability of physical processes over very large scales (such as entire lakes). Here the focus is on the heterogeneity of water constituents, which promote the coexistence and biodiversity of plankton – the base of the food web.
Our current engagement is the Sinergia project – A Flexible Underwater Distributed Robotic System for High-Resolution Sensing of Aquatic Ecosystems – collaborating with scientists on the fields of underwater robotics (DISAL EPFL) and freshwater phytoplankton ecology (UniGeneve).
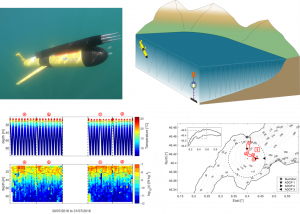
In summer 2018, we deployed a buoyancy-controlled autonomous underwater vehicle (aka glider; Slocum – Teledyne) in collaboration with Alexander Forrest from UC Davis, CA, USA. This field campaign provided continuous and high-resolution measurements covering long distances and different depths in Lake Geneva, offering a novel in-situ glance of mixing processes affected by large-scale water movements. Preliminary results of the field campaign were presented at EGU General Assembly 2019. The poster can be found here.
Sommer, T., F. Danza, J. Berg, A. Sengupta, G. Constantinescu, T. Tokyay, H. Bürgmann, Y. Dressler, O.R. Sepulveda Steiner, C.J. Schubert, M. Tonolla, and A. Wüest. (2017). Bacteria-induced mixing in natural waters.Geophysical Research Letters44 (18), 9424–9432, doi:10.1002/2017GL074868.