Dependable Control and Decision Group
DECODE – Dependable Control and Decision Group
Designing the Mathematical Guardrails for Safe, AI-Driven Control
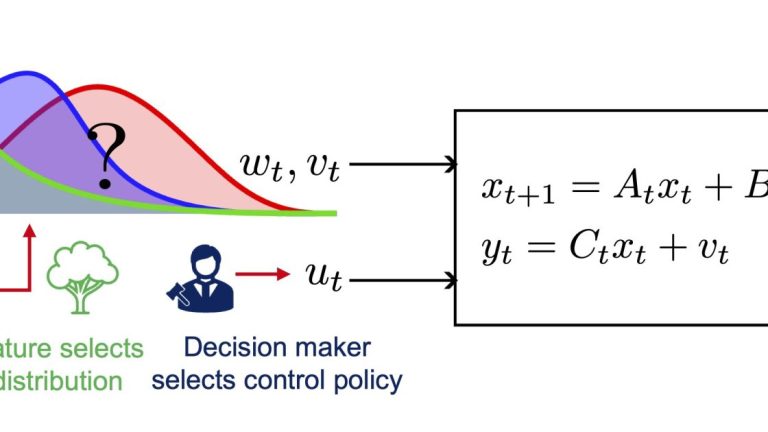
The DECODE (Dependable Control and Decision) group bridges the gap between advanced machine learning and rigorous control theory by establishing foundational reliability guarantees for real-time AI control. Our goal is to contribute to the development of next-generation systems that are dependable, more autonomous, and self-adapt to changes in the internal dynamics and the surrounding environment.
The DECODE group is part of the EPFL Automatic Control Laboratory and the NCCR automation.
All software related to our publications is freely available on GitHub.
Do not forget to follow us on Linkedin!
AA
Research topics
News









AA
Funding acknowledgment


Contact
Head of the group: Giancarlo Ferrari Trecate
Office: ME C2 398
Mail: [email protected]
Administration : Barbara Schenkel
Office : ME C2 389
Phone : +41 21 693 07 80
Fax : +41 21 693 2574
Mail : [email protected]
How to reach the DECODE group and the Laboratoire d’Automatique from the M2 metro station
Dependable Control and Decision group (DECODE)
Ecole Polytechnique Fédérale de Lausanne
EPFL STI IGM SCI-STI-GFT
ME C2 398 (Bâtiment ME) , Station 9
CH-1015 Lausanne
Switzerland