Neural Control with Stability Guarantees
 |
 |
We design novel mathematical architectures that integrate the expressivity of deep learning into control loops while rigorously guaranteeing closed-loop stability and performance by construction.
Integrating high-performance neural policies into safety-critical control loops without sacrificing stability is a central challenge in modern automation. The DECODE group tackles this through neural architectures and control frameworks designed to satisfy rigorous stability by construction while optimizing complex performance indices.
Our work encompasses the characterization of all and only stability-preserving controllers for nonlinear systems; the development of stable deep neural architectures to restrict controller search to this class; neural distributed controllers built on port-Hamiltonian structures to guarantee dissipativity in interconnected systems; and online adaptation methods that preserve closed-loop stability under environmental shifts or in a data-driven RL setting. We further develop stable neural identification techniques that capture nonlinear system dynamics from closed-loop experiments.
Taken together, these contributions form a unified framework for synthesizing formally dependable controllers for nonlinear, distributed systems while meeting arbitrary performance objectives.
- C. L. Galimberti, L. Furieri, and G. Ferrari-Trecate, “Parametrizations of all stable closed-loop responses: From theory to neural network control design,” Annu. Rev. Control, vol. 60, Art. no. 101012, 2025.
-
L. Furieri, S. Shenoy, D. Saccani, A. Martin, and G. Ferrari-Trecate, “MAD: A magnitude and direction policy parametrization for stability constrained reinforcement learning,” in Proc. 64th IEEE Conf. Decis. Control (CDC), Rio de Janeiro, Brazil, 2025.
-
M. G. Boroujeni, L. Meroi, L. Massai, C. L. Galimberti, and G. Ferrari-Trecate, “Neural identification of feedback-stabilized nonlinear systems,” in Proc. 64th IEEE Conf. Decis. Control (CDC), Rio de Janeiro, Brazil, 2025.
-
N. Kirsch, L. Massai, and G. Ferrari-Trecate, “Boosting the transient performance of reference tracking controllers with neural networks,” in Proc. 64th IEEE Conf. Decis. Control (CDC), Rio de Janeiro, Brazil, 2025.
-
L. Furieri, C. L. Galimberti, and G. Ferrari-Trecate, “Learning to boost the performance of stable nonlinear systems,” IEEE Open J. Control Syst., vol. 3, pp. 306–318, 2024.
-
L. Massai, D. Saccani, L. Furieri, and G. Ferrari-Trecate, “Unconstrained learning of networked nonlinear systems via free parametrization of stable interconnected operators,” in Proc. Eur. Control Conf. (ECC), Stockholm, Sweden, 2024, pp. 651–656.
-
D. Saccani, L. Massai, L. Furieri, and G. Ferrari-Trecate, “Optimal distributed control with stability guarantees by training a network of neural closed-loop maps,” in Proc. 63rd IEEE Conf. Decis. Control (CDC), Milan, Italy, 2024.
-
M. Zakwan and G. Ferrari-Trecate, “Neural distributed controllers with port-Hamiltonian structures,” in Proc. 63rd IEEE Conf. Decis. Control (CDC), Milan, Italy, 2024, pp. 8633–8638.
-
M. G. Boroujeni, C. L. Galimberti, A. Krause, and G. Ferrari-Trecate, “A PAC-Bayesian framework for optimal control with stability guarantees,” in Proc. 63rd IEEE Conf. Decis. Control (CDC), Milan, Italy, 2024.
- L. Furieri, C. L. Galimberti, M. Zakwan, and G. Ferrari-Trecate, “Distributed neural network control with dependability guarantees: A compositional port-Hamiltonian approach,” in Proc. 4th Annu. Conf. Learn. Dyn. Control (L4DC), PMLR, vol. 168, pp. 1–13, 2022.
Unconstrained Parametrizations of Stable Neural Operators
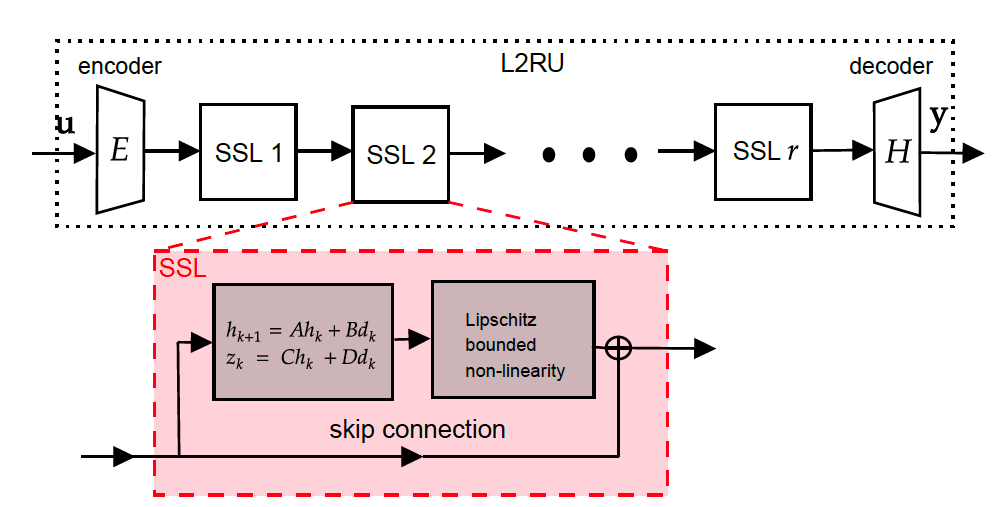
We develop mathematical frameworks that allow neural networks to be trained without constraints while guaranteeing stability and dissipativity properties by design.
This research direction establishes mathematical frameworks for the design and identification of high-performance controllers and models with inherent stability and dissipativity guarantees. By developing unconstrained parametrizations for diverse architectures—including bilinear systems and structured state-space models—we eliminate the need for computationally expensive constrained optimization during training. These methodologies enable the seamless integration of deep learning with classical control theory, ensuring that autonomous systems remain formally dependable even when optimizing for complex, real-world performance objectives.
- L. Massai and G. Ferrari-Trecate, “Free Parametrization of L_2-bounded State Space Models,” in Proc. 64th IEEE Conf. Decis. Control (CDC), Rio de Janeiro, Brazil, 2025.
- V. Gupta, M. Zakwan, G. Ferrari-Trecate, and A. Karimi, “Ensuring stability in bilinear structured state-space models via IQCs: A free parameterisation approach,” in Proc. 64th IEEE Conf. Decis. Control (CDC), Rio de Janeiro, Brazil, 2025.
- M. Zakwan, L. Xu, and G. Ferrari-Trecate, “Robust convolution neural ODEs via contractivity-promoting regularization,” in Proc. 64th IEEE Conf. Decis. Control (CDC), Rio de Janeiro, Brazil, 2025.
- M. Zakwan, L. Massai, E. C. Balta, and G. Ferrari-Trecate, “Free parametrization of L_2-bounded structured state-space controllers for nonlinear control with stability guarantees,” submitted for publication, 2025.
- L. Di Natale, M. Zakwan, P. Heer, G. Ferrari-Trecate, and C. N. Jones, “SIMBa: System identification methods leveraging backpropagation,” IEEE Trans. Control Syst. Technol., vol. 33, no. 2, pp. 418–430, Mar. 2025.
- D. Martinelli, C. L. Galimberti, I. R. Manchester, L. Furieri, and G. Ferrari-Trecate, “Unconstrained parametrization of dissipative and contracting neural ordinary differential equations,” in Proc. 62nd IEEE Conf. Decis. Control (CDC), Singapore, 2023.
- M. Zakwan, L. Xu, and G. Ferrari-Trecate, “Robust classification using contractive Hamiltonian neural ODEs,” IEEE Control Syst. Lett., vol. 7, pp. 145–150, 2023.
Regret-Optimal Control for Robust and Distributed Systems
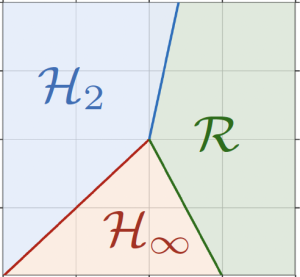
We develop control strategies that minimize “regret”—the performance gap relative to an ideal, clairvoyant policy—providing a robust alternative to traditional worst-case or average-case optimization.
Standard control methods often struggle to balance performance between stochastic noise and adversarial disturbances. Our research leverages the concept of regret minimization to design controllers that competitively track the optimal performance of a “clairvoyant” benchmark—one that knows future disturbances or system parameters in advance. By extending this framework to receding horizon control and distributed systems, we enable autonomous agents to adapt to heterogeneous uncertainties and structural constraints, bridging the gap between classical optimal control and online learning.
-
A. Martin, L. Furieri, F. Dörfler, J. Lygeros, and G. Ferrari-Trecate, “On the guarantees of minimizing regret in receding horizon,” IEEE Trans. Autom. Control, vol. 70, no. 3, pp. 1547–1562, Mar. 2025.
-
A. Martin, L. Furieri, F. Dörfler, J. Lygeros, and G. Ferrari-Trecate, “Regret optimal control for uncertain stochastic systems,” Eur. J. Control, vol. 80, Art. no. 101051, 2024.
-
D. Martinelli, A. Martin, G. Ferrari-Trecate, and L. Furieri, “Closing the gap to quadratic invariance: A regret minimization approach to optimal distributed control,” in Proc. Eur. Control Conf. (ECC), Stockholm, Sweden, 2024, pp. 756–761.
- J.-S. Brouillon, F. Dörfler, and G. Ferrari-Trecate, “Minimal regret state estimation of time-varying systems,” IFAC-PapersOnLine, vol. 56, no. 2, pp. 2595–2600, 2023.
-
V. Gupta, D. Martinelli, G. Ferrari-Trecate, L. Furieri, and A. Karimi, “Data-driven optimal distributed controller synthesis via spatial regret,” submitted for publication.
Distributionally Robust Control
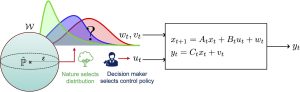
We design control and estimation policies that remain safe and optimal even when the statistical properties of system uncertainties are only partially known from finite data samples.
In real-world applications, precise probability distributions of disturbances are rarely available, often leading to poor performance or safety violations. Our research utilizes Distributionally Robust Optimization (DRO) to bridge this gap, constructing ambiguity sets—such as those based on Wasserstein or Sinkhorn distances—around empirical data to bound the true uncertainty. By integrating these statistical tools with system-level parametrizations, we derive tractable convex programs for synthesizing infinite-horizon controllers and state estimators that provide rigorous probabilistic guarantees against distributional mismatch and data scarcity.
-
R. Cescon, A. Martin, and G. Ferrari-Trecate, “Data-driven distributionally robust control based on Sinkhorn ambiguity sets,” in Proc. 64th IEEE Conf. Decis. Control (CDC), Rio de Janeiro, Brazil, 2025.
-
J.-S. Brouillon, A. Martin, J. Lygeros, F. Dörfler, and G. Ferrari-Trecate, “Distributionally robust infinite-horizon control: From a pool of samples to the design of dependable controllers,” IEEE Trans. Autom. Control, vol. 70, no. 10, Oct. 2025.
-
J.-S. Brouillon, F. Dörfler, and G. Ferrari-Trecate, “Regularization for distributionally robust state estimation and prediction,” IEEE Control Syst. Lett., vol. 7, pp. 2713–2718, 2023.
Plug-and-Play Control and Cyber-Physical Security
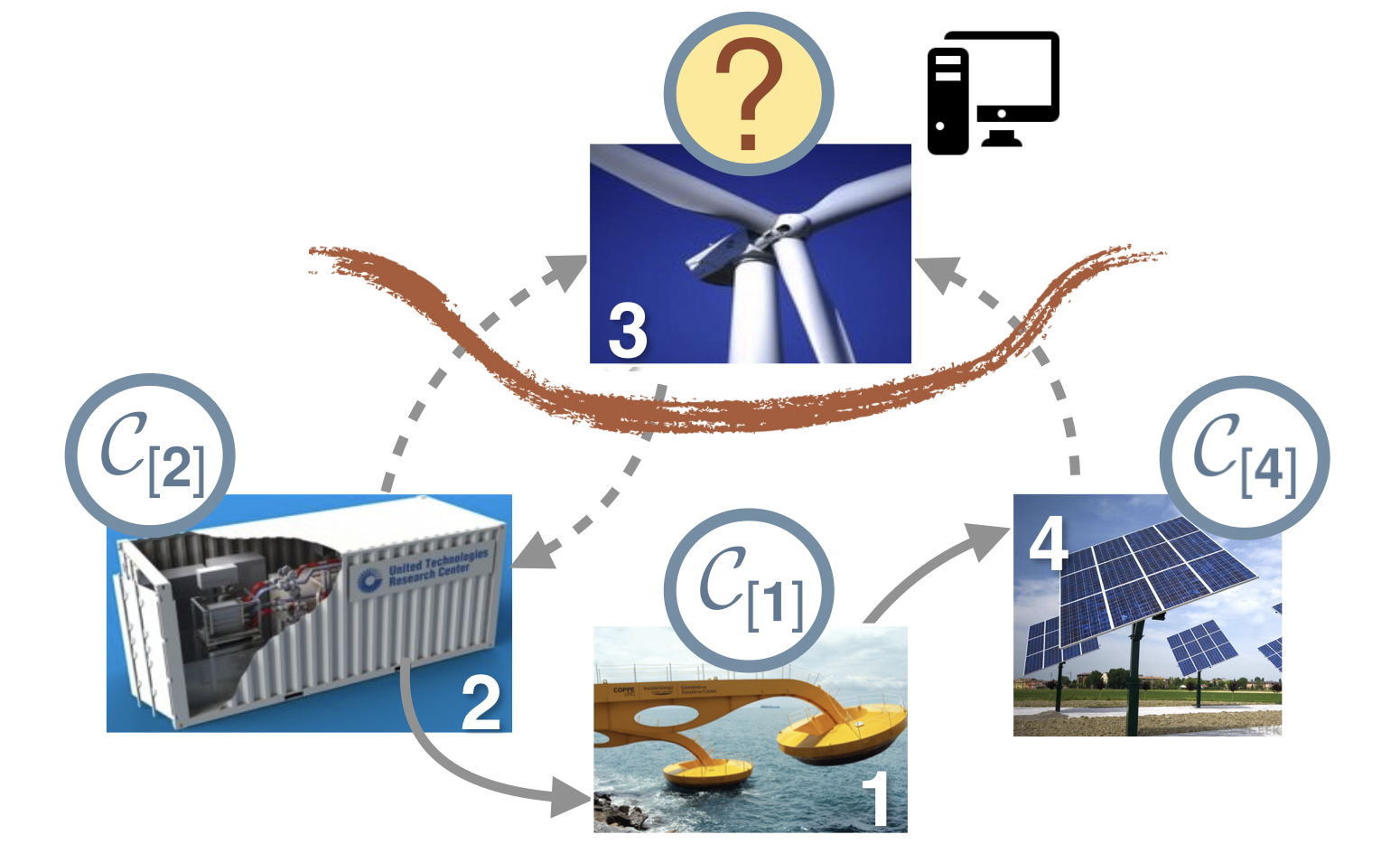
We develop distributed control and estimation architectures that enable “plug-and-play” flexibility for large-scale systems while rigorously protecting them against component faults and malicious cyber-attacks.
Modern critical infrastructures, such as power grids and sensor networks, must be both flexible enough to accommodate topological changes and robust enough to withstand adversarial threats. Our research pioneers Plug-and-Play (PnP) methodologies that allow subsystems to be added or removed on the fly without jeopardizing global stability, utilizing decentralized Model Predictive Control and distributed state estimation. Complementing this, we design advanced Fault Detection and Isolation (FDI) schemes and active watermarking techniques that secure these interconnected systems against stealthy data-injection attacks and replay attacks, ensuring operational integrity even in hostile environments.
-
M. S. Turan, L. Xu, and G. Ferrari-Trecate, “On consensusability of linear interconnected multiagent systems and simultaneous stabilization,” IEEE Trans. Control Netw. Syst., vol. 9, no. 1, pp. 403–414, Mar. 2022.
-
A. J. Gallo, M. S. Turan, F. Boem, T. Parisini, and G. Ferrari-Trecate, “A distributed cyber-attack detection scheme with application to DC microgrids,” IEEE Trans. Autom. Control, vol. 65, no. 9, pp. 3800–3815, Sep. 2020.
-
F. Boem, R. Carli, M. Farina, G. Ferrari-Trecate, and T. Parisini, “Distributed fault detection for interconnected large-scale systems: A scalable plug & play approach,” IEEE Trans. Control Netw. Syst., vol. 6, no. 2, pp. 800–814, June 2019.
-
F. Boem, S. Riverso, G. Ferrari-Trecate, and T. Parisini, “Plug-and-play fault detection and isolation for large-scale nonlinear systems with stochastic uncertainties,” IEEE Trans. Autom. Control, vol. 64, no. 1, pp. 4–19, Jan. 2019.
-
A. J. Gallo, M. S. Turan, F. Boem, G. Ferrari-Trecate, and T. Parisini, “Distributed watermarking for secure control of microgrids under replay attacks,” IFAC-PapersOnLine, vol. 51, no. 23, pp. 182–187, 2018.
-
A. J. Gallo, M. S. Turan, P. Nahata, F. Boem, T. Parisini, and G. Ferrari-Trecate, “Distributed cyber-attack detection in the secondary control of DC microgrids,” in Proc. Eur. Control Conf. (ECC), Limassol, Cyprus, 2018, pp. 268–273.
-
S. Riverso, M. Farina, and G. Ferrari-Trecate, “Plug-and-play state estimation and application to distributed output-feedback model predictive control,” Eur. J. Control, vol. 25, pp. 17–26, 2015.
-
S. Riverso, M. Farina, and G. Ferrari-Trecate, “Plug-and-play model predictive control based on robust control invariant sets,” Automatica, vol. 50, no. 8, pp. 2179–2186, 2014.
-
S. Riverso, M. Farina, and G. Ferrari-Trecate, “Plug-and-play decentralized model predictive control for linear systems,” IEEE Trans. Autom. Control, vol. 58, no. 10, pp. 2608–2614, Oct. 2013.
Control and Identification of Power Distribution Networks
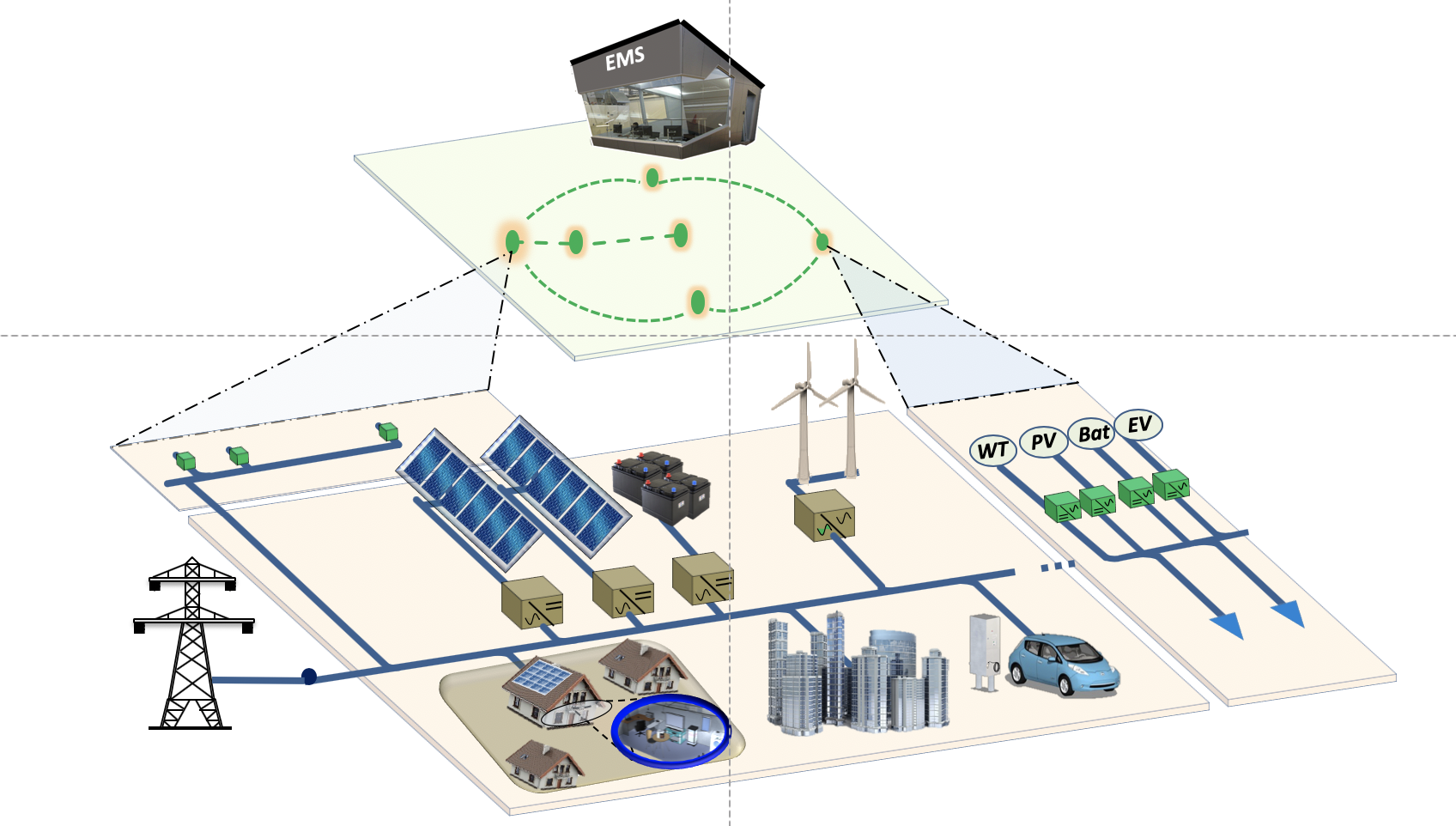
We develop scalable, passivity-based control architectures for ensuring the stability of AC/DC microgrids and advanced statistical algorithms for identifying grid topologies and parameters from real-time metering data.
Reliable operation of future power systems requires both robust stabilization mechanisms for renewable integration and accurate knowledge of the grid’s physical infrastructure. Our control research leverages passivity theory and hierarchical architectures to design plug-and-play controllers that guarantee voltage stability and current sharing in islanded microgrids, regardless of topology changes or load heterogeneity. Complementing this, our estimation research utilizes Bayesian frameworks and Maximum Likelihood Estimation to reconstruct network admittance matrices and topologies using data from Phasor Measurement Units (PMUs) and non-synchronized smart meters, overcoming the challenge of missing or obsolete grid models.
-
J.-S. Brouillon, K. Moffat, F. Dörfler, and G. Ferrari-Trecate, “Power grid parameter estimation without phase measurements: Theory and empirical validation,” Electric Power Systems Research, vol. 235, Art. no. 110709, 2024.
-
L. Laurent, J.-S. Brouillon, and G. Ferrari-Trecate, “Maximum likelihood estimation of distribution grid topology and parameters from smart meter data,” in Proc. IEEE PES Grid Edge Technol. Conf. Expo. (Grid Edge), San Diego, CA, USA, 2023.
-
J.-S. Brouillon, E. Fabbiani, P. Nahata, K. Moffat, F. Dörfler, and G. Ferrari-Trecate, “Bayesian error-in-variables models for the identification of distribution grids,” IEEE Trans. Smart Grid, vol. 14, no. 2, pp. 1289–1299, Mar. 2023.
-
F. Strehle, P. Nahata, A. J. Malan, S. Hohmann, and G. Ferrari-Trecate, “A unified passivity-based framework for control of modular islanded AC microgrids,” IEEE Trans. Control Syst. Technol., vol. 30, no. 5, pp. 1960–1978, Sep. 2022.
-
E. Fabbiani, P. Nahata, G. De Nicolao, and G. Ferrari-Trecate, “Identification of AC distribution networks with recursive least squares and optimal design of experiment,” IEEE Trans. Control Syst. Technol., vol. 30, no. 4, pp. 1750–1757, July 2022.
-
P. Nahata, M. S. Turan, and G. Ferrari-Trecate, “Consensus-based current sharing and voltage balancing in DC microgrids with exponential loads,” IEEE Trans. Control Syst. Technol., vol. 30, no. 4, pp. 1668–1675, July 2022.
-
P. Nahata, A. La Bella, R. Scattolini, and G. Ferrari-Trecate, “Hierarchical control in islanded DC microgrids with flexible structures,” IEEE Trans. Control Syst. Technol., vol. 29, no. 6, pp. 2379–2394, Nov. 2021.
-
P. Nahata, R. Soloperto, M. Tucci, A. Martinelli, and G. Ferrari-Trecate, “A passivity-based approach to voltage stabilization in DC microgrids with ZIP loads,” Automatica, vol. 113, Art. no. 108770, 2020.
-
P. Nahata and G. Ferrari-Trecate, “On existence of equilibria, voltage balancing, and current sharing in consensus-based DC microgrids,” in Proc. Eur. Control Conf. (ECC), Saint Petersburg, Russia, 2020, pp. 1362–1367.
-
A. Martinelli, P. Nahata, and G. Ferrari-Trecate, “Voltage stabilization in MVDC microgrids using passivity-based nonlinear control,” in Proc. 57th IEEE Conf. Decis. Control (CDC), Miami Beach, FL, USA, 2018, pp. 6960–6965.