Ongoing projects

Crowd-Robot Interaction
Mobility in an effective and socially-compliant manner is an essential yet challenging task for robots operating in crowded spaces. In this project, we want to go beyond first-order Human-Robot interaction and more explicitly model Crowd-Robot Interaction (CRI). More details here.
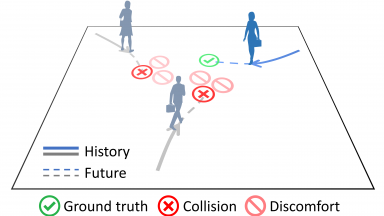
Social-NCE
Learning socially-aware motion representations is at the core of recent advances in multi-agent problems, such as human motion forecasting and robot navigation in crowds. In this work, we introduce a contrastive learning approach built with negative data augment to promote robust motion representations.

End-to-End Planning
End-to-end driving policies trained by imitation learning suffer from compounding errors in closed-loop deployment. We present Rasterization Augmented Planning (RAP), a scalable data augmentation pipeline that replaces costly photorealistic rendering with lightweight 3D rasterization of annotated primitives. RAP enables counterfactual recovery maneuvers and cross-agent view synthesis, while a Raster-to-Real feature alignment bridges the sim-to-real gap. Experiments show RAP achieves state-of-the-art robustness and generalization across NAVSIM v1/v2, Waymo E2E, and Bench2Drive, offering a practical alternative to photorealistic simulators.