Peripheral nerve stimulation for restoring fine grasping functions
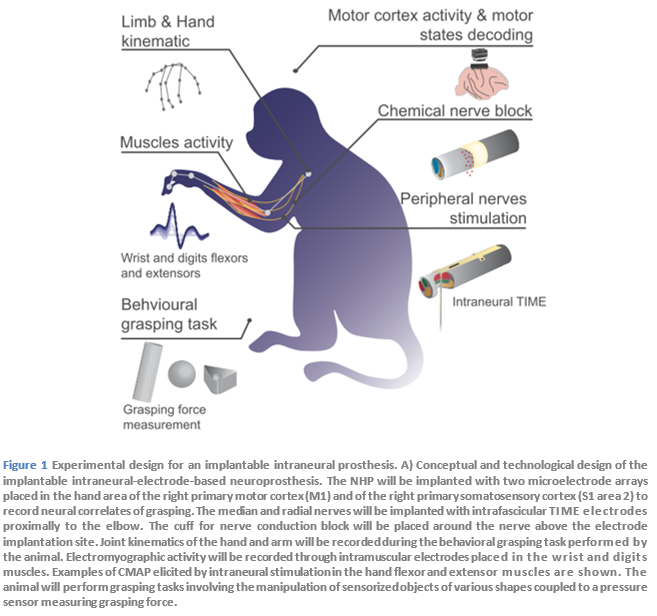
Grasping is one of our most important motor function. It allows us to interact naturally and intuitively with our environment. Regaining the capacity to grasp and manipulate objects is thus crucial for people living with upper limb paralysis. Current upper limb neuroprostheses are based on functional electrical stimulation (FES) of the neuromuscular system below the lesion, but have shown limited success to restore functional grasping for activities of daily living. In fact, these relatively simple systems activate muscles to produce one or two grasp types, but non-intuitive control strategies and the rapid stimulation-induced muscle fatigue have hampered their acceptance among patients. More complex systems, aiming at restoring a greater degree of functionality rely on complex and cumbersome setups, preventing the technologies to be translated to the clinic. The TNE lab addresses those issues by proposing to use intraneural electrical stimulation for enhanced selectivity in muscle recruitment using a reduced number of electrodes. Based on recent results in intraneural electrode design, and on the assessment of peripheral nerve stimulation (PNS) efficacy in animal models and humans, we seek to design an intuitive stimulation strategy to restore fine and functional grasping after paralysis using intraneural electrodes. This study is organized in two main objectives, namely 1) The development of intraneural stimulation paradigms of the non-human primate (NHP) upper limb nerves and 2) The experimental validation in a NHP model of cervical spinal cord injury.
Sensory-motor integration during reaching and grasping
Information about body position and movement (proprioception) is critical to the central nervous system in order to adapt the generation of movement to its environment. We use our limbs to manipulate objects, but also to communicate with and understand our environment. While touch as feedback modality has been extensively studied, proprioception and its importance for movement control and adjustment is far less understood.
More specifically, the mechanisms of signaling hand proprioception via the peripheral nerves and how those signals are encoded in the primary somatosensory cortex remain elusive. Furthermore the integration of proprioception and movement representations at the cortical level (S1 and M1 respectively) is not yet fully understood. Here, we aim at gaining new insights into the role of proprioception during skilled motor tasks and aim to understand how behavioral outputs (arm and hand kinematics, EMG activity) are related to cortical representations of movement (M1) and proprioception (S1) in non-human primates. We will track the movements of the hand and arm as animals perform the different tasks with motion capture systems that track the 3D joint coordinated of arm and hand. Additionally, we will record from chronic intramuscular electrodes to match muscle activation patterns to cortical activity, behavior and joint kinematics.
Contact
If you are interested in this research topic and wish to learn more, don’t hesitate to contact us:
Sophie Wurth ([email protected])
Marion Badi-Dubois ([email protected])