Project type: Master project
Description: Aquatic locomotion entails a complex interplay between the body of the swimmer and the induced flow in the environment (Fig. 1). It is a challenging problem in the context of fluid–structure interaction and it is still not understood what is linked to biology and what is linked to mechanics. To dissociate these two mechanisms, numerous artificial systems have been studied in experiments and models such as flapping foils, compliant robots or rigid airfoils.
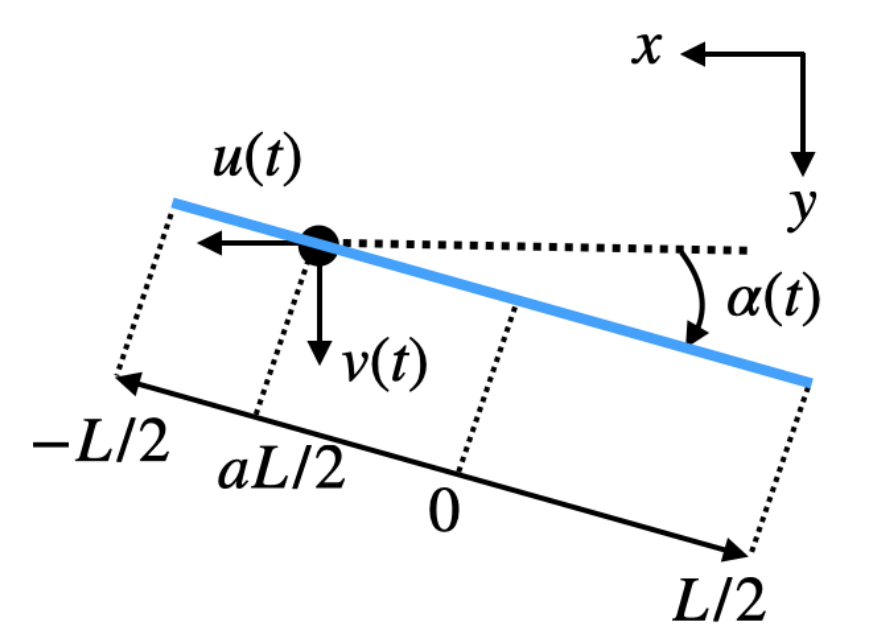
In this work we propose the study of a very simple model of aquatic locomotion considering an airfoil-shaped, rigid and two-dimensional body performing a kinematic motion of amplitude A and frequency f. The objective of this project is the calculation of the hydrodynamical forces on the swimmer employing the theory of perfect fluids and the analysis of how the propulsive forces are affected by the kinematic parameters of the swimmer and the characteristics of the surrounding fluid.

Supervisor: Jesús Sánchez Rodríguez