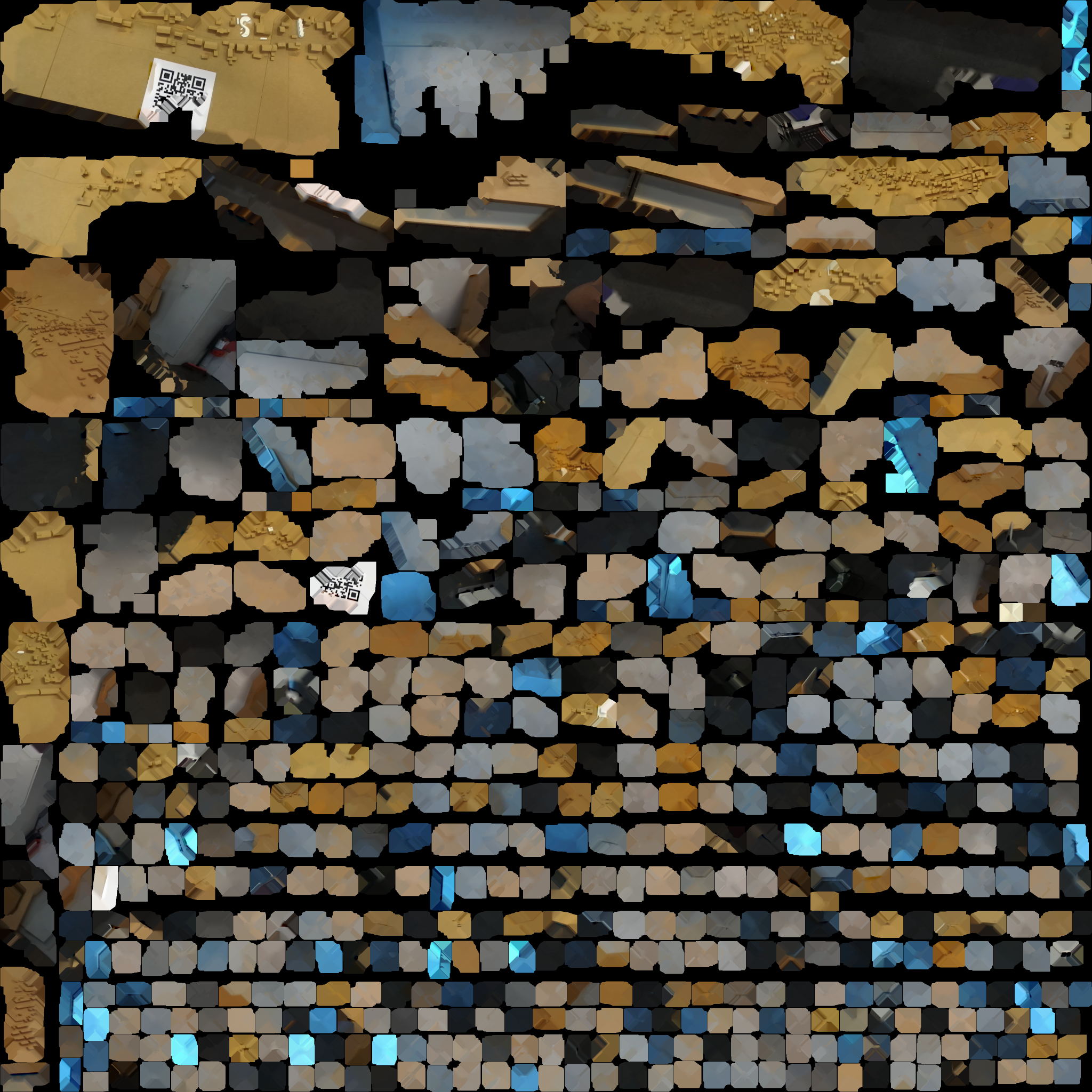
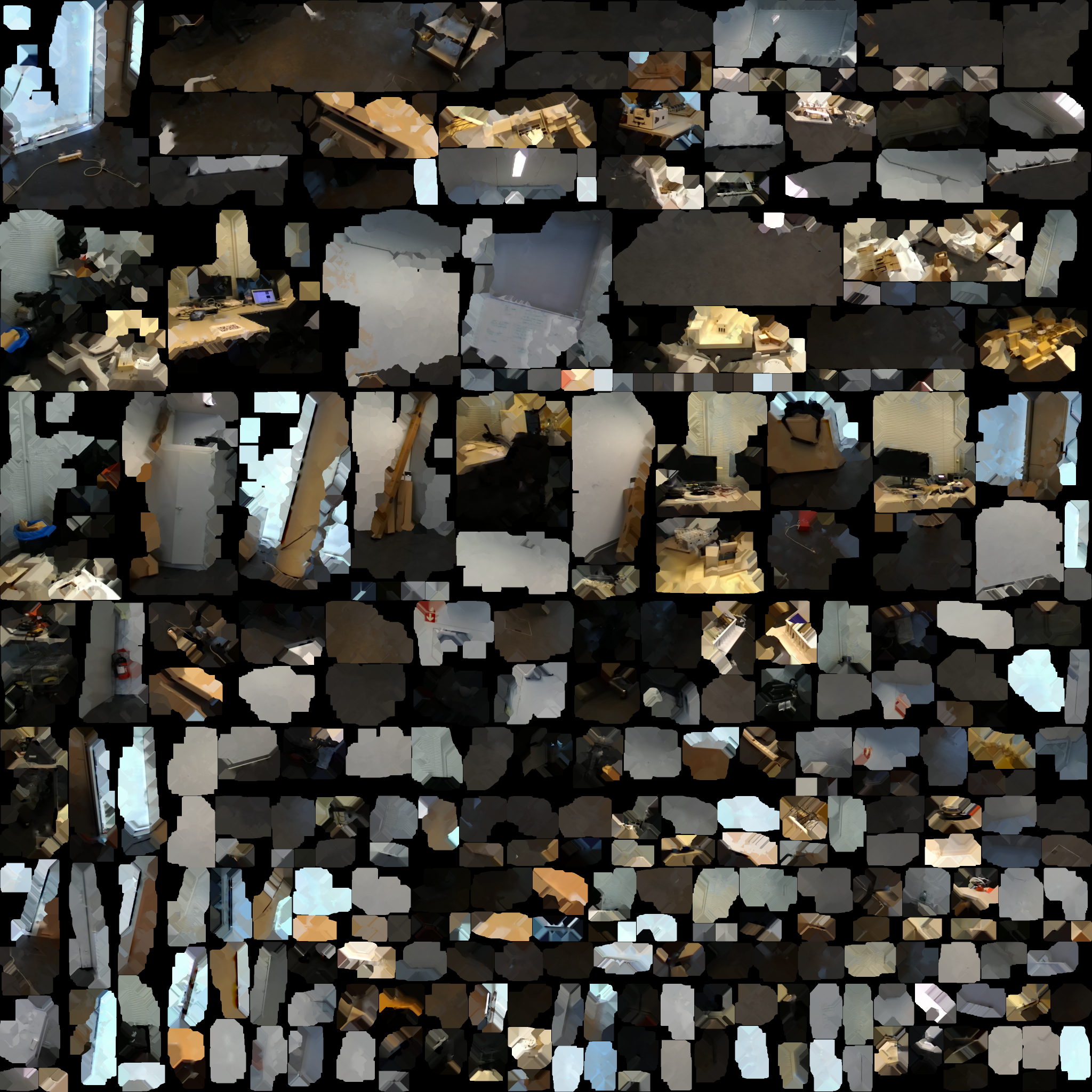
The project takes inspiration from forensic practices to investigate alternative forms of drone interaction and navigation. It is an interface, embedded with a real-time 2dTexture-to-3dCoordinatesalgorithm, that enables user to send 3d drone waypoints commands from a single atlas of 2d visual patches. A series of experiments were made using scans of differing spatial and temporal contexts.
Keywords: Forensic, Drone, 3D camera, 3D Mesh Interior, 2D Texture Atlas, QR Code
Bachelor’s semester project student: Daod Nathoo Rayan
Supervisor: Immanuel Koh
Professor: Jeffrey Huang
Image credits: MxD