To apply :
Please tell us your motivation to the specific project, your skillsets and past experiences + something that shows that (CV, website, photos, videos, github, etc), and your transcript.
Students from all research backgrounds are welcome – for example, mechanical engineering, bioengineering, computer science, materials etc.
Multimodal Textile Sensor Glove with VMC-based Sensing for Hand Pose and Touch Estimation

Description
Dexterous manipulation, whether performed by a human hand or a robotic gripper, requires rich, continuous feedback about both the configuration of the fingers and the forces applied at contact. While rigid sensor arrays and camera-based hand tracking exist, they are bulky, fragile, and not conformable to any surface. Textile-based sensing offers a compelling alternative: compliant, conformable, and manufacturable at low cost. This project aims to design and fabricate a multimodal sensor in the form of a glove-like textile garment with a network of resistive and capacitive sensing elements. This glove should be adapted both to a human and a robotic hand, and simultaneously estimate finger pose (joint angles) and local contact forces (touch location and normal force), making it multimodal.
The first task is to fabricate a set of textile sensor patch samples combining resistive strain and capacitive pressure elements across varying electrode geometries. With the samples fabricated, the core goal is to characterize how material and placement jointly affect sensitivity and hysteresis to build a forward map to sensing performance. Finally, to enhance the raw textile data, the student will validate the platform by integrating a model-based prior using a force-based dynamic mapping, specifically Virtual Model Control (VMC). Practically, the student will demonstrate real-time finger pose reconstruction and contact detection on a robotic hand using a Kalman filter that fuses the characterized textile sensor array data with VMC-based kinematic and force predictions.
Requirements
- Creative, motivated student with interest in wearable systems and robotics
- Basic programming skills (Python, Arduino)
- Good prototyping and hands-on fabrication skills, experience with electronics
- Familiarity with signal processing (Kalman filter) is a plus
- Familiarity with ROS is a plus
- No prior experience with electronic textiles is required, but willingness to learn hands-on fabrication techniques is essential
Workload
20% Sensor design, 35% Sample fabrication and characterisation, 30% Data collection, modelling & pose/touch reconstruction filtering, 15% Full-glove validation
Contact
Send an e-mail to both Juliette Hars ([email protected]) and Lorenzo Vignoli ([email protected]).
To apply, please include a short motivation for this specific project, your CV, and your transcript.
Preferred starting date: between September and December 2026
Main references
[1] Sundaram, S., et al. “Learning the signatures of the human grasp using a scalable tactile glove.” Nature 569.7758 (2019): 698-702.
[2] Glauser, O., et al. “Interactive hand pose estimation using a stretchable 3D interacting sensor.” Nature communications 10.1 (2019): 1-15.
[3] Larby, D., and F. Forni. “Optimal Virtual Model Control for Robotics: Design and Tuning of Passivity-Based Controllers.” IEEE Transactions on Robotics 42 (2026): 439-454.
Multimodal Textile Sensor Sleeve with VMC-based Sensing for Soft Arm Curvature and Contact Force Estimation

Description
Soft continuum manipulators offer unparalleled intrinsic compliance, making them ideal for robust interactions in various tasks. However, state estimation for these continuous systems requires rich feedback about both the curvature of the arm and the forces applied at contact. While rigid sensor arrays exist, they are bulky, fragile, and not conformable to any surface. Textile-based sensing offers a compelling alternative: compliant, conformable, and manufacturable at low cost. This project aims to design and fabricate a multimodal sensor in the form of a conformable textile garment (sleeve) with a network of resistive and capacitive sensing elements. This sleeve should simultaneously estimate arm curvature (bending parameters) and local contact forces (touch location and normal forces), making it multimodal.
The first task is to fabricate a set of textile sensor patch samples combining resistive strain and capacitive pressure elements across varying electrode geometries. With the samples fabricated, the core goal is to characterize how material and placement jointly affect sensitivity and hysteresis to build a forward map to sensing performance. Finally, to enhance the raw textile data, the student will validate the platform by integrating a model-based prior using a force-based dynamic mapping, specifically Virtual Model Control (VMC). Practically, the student will demonstrate real-time arm curvature reconstruction and contact detection on a soft robotic arm using a Kalman filter that fuses the characterized textile sensor data with VMC-based curvature and force predictions.
Requirements
- Creative, motivated student with interest in soft robotics
- Basic programming skills (Python, Arduino)
- Good prototyping and hands-on fabrication skills, experience with electronics
- Familiarity with signal processing (Kalman filter) is a plus
- Familiarity with ROS is a plus
- No prior experience with electronic textiles is required, but willingness to learn hands-on fabrication techniques is essential
Workload
20% Sleeve design, 35% Sample fabrication and characterization, 30% Data collection, modeling & curvature/touch reconstruction filtering, 15% Full-sleeve validation
Contact
Send an e-mail to both Juliette Hars ([email protected]) and Lorenzo Vignoli ([email protected]).
To apply, please include a short motivation for this specific project, your CV, and your transcript.
Main references
[1] Shih, B., et al. “Electronic skins and machine learning for intelligent soft robots.” Science Robotics 5.41 (2020): eaaz9239.
[2] Webster III, R. J., and B. A. Jones. “Design and kinematic modeling of constant curvature continuum robots: A review.” The International Journal of Robotics Research 29.13 (2010): 1661-1683.
[3] Larby, D., and F. Forni. “Optimal Virtual Model Control for Robotics: Design and Tuning of Passivity-Based Controllers.” IEEE Transactions on Robotics 42 (2026): 439-454.
Cooperative Planning and Grasping for Bimanual Soft Arms (Master Thesis)

Soft continuum manipulators offer unparalleled intrinsic compliance, making them ideal for robust interactions in various tasks. Virtual Model Control (VMC), combined with energy-tank guarantees, allows independent control of position and force, together with stiffness modulation and sensing. Building upon our functional bimanual setup, which already features a low-level passivity-based VMC and a Kalman filter for state estimation, this project aims to elevate the system from basic control to advanced cooperative dual-arm manipulation by distributing stiffness and interaction between the two arms.
Practically, the student will develop and integrate a high-level planner with an easy-to-use interface (using joysticks or other teleoperation systems) to execute dynamic bimanual tasks that rigidly actuated robots struggle to perform. Moreover, the student will integrate IMU sensors with PCC kinematic reconstruction on the robot and fuse them with the motor encoders. Next, experimental validation will focus on scenarios that highlight continuous physical adaptation between the two arms. Specifically, the student will demonstrate cooperative transport of delicate payloads, compliant bimanual assembly, and environmental wrapping combined with stiffness sensing.
Requirements
- Highly motivated for the topic
- Programming experience (Python)
- Knowledge of robots and control theory
- Familiarity with sensor integration and electronics
- Familiarity with ROS and embedded systems is a plus
Workload
30% literature review and system familiarization, 30% algorithm and interface design, 40% experimental validation on the physical bimanual setup
Contact
Lorenzo Vignoli, [email protected]
To apply, please include a short motivation for this specific project, your CV, and your transcript
Preferred starting date: between September and December 2026
Main References
[1] Smith, C., et al. “Dual arm manipulation—A survey.” Robotics and Autonomous systems 60.10 (2012): 1340-1353.
[2] George Thuruthel, T., et al. “Control strategies for soft robotic manipulators: A survey.” Soft robotics 5.2 (2018): 149-163.
[3] Ferraguti, F., et al. “A tank-based approach to impedance control with variable stiffness.” 2013 IEEE ICRA. IEEE, 2013.
[4] Roa, M. A., and R. Suárez. “Grasp quality measures: review and performance.” Autonomous robots 38.4 (2015): 313-327.
[5] Larby, D., and F. Forni. “Optimal Virtual Model Control for Robotics: Design and Tuning of Passivity-Based Controllers.” IEEE Transactions on Robotics 42 (2026): 439-454.
Embedded Stiffness Rhythmic Control for Terrain-Robust Crawling Turtle (Master Thesis)

Locomotion robustness in legged systems greatly benefits from physical compliance, which naturally absorbs disturbances and reduces the burden on control algorithms. When coupled with proprioceptive feedback, this allows terrain sensing and gait switching. Variable Stiffness Actuators (VSAs) take this a step further by enabling tunable hardware compliance, allowing robots to adapt to diverse environments on the fly. In this project, the student will work with an existing, fully functional turtle-inspired soft robot equipped with VSA limbs and driven by current-controlled motors. The first task is to transition this platform to complete autonomy by designing and integrating a custom embedded electronics architecture (microcontroller and battery).
With the embedded hardware deployed, the core goal is to develop a hybrid controller that combines Central Pattern Generators (CPGs) with Virtual Model Control (VMC) for active compliance, while tuning the passive compliance thanks to the existing springs. Practically, the student will program open-loop CPGs to govern baseline rhythmic locomotion and implement the VMC algorithm to actively modulate the software and hardware stiffness via motor currents and positions. As a consequence, the robot will be able to adapt the gait cycle based on physical terrain feedback using minimal sensing and actuation. Finally, the student will systematically validate the platform’s multi-terrain robustness in real-world experiments by mapping speed and cost of transport across flat ground, slopes, and granular media.
Requirements
- Highly motivated for the topic
- Practical experience with electronics and embedded systems
- Knowledge of robotics, model-based control, or bio-inspired algorithms
- Programming experience (Python)
- Previous experience with ROS is a plus
Workload
20% literature review and system familiarization, 30% electronics integration, 50% control implementation and real-world multi-terrain validation
Contact
Lorenzo Vignoli, [email protected]
To apply, please include a short motivation for this specific project, your CV, and your transcript
Preferred starting date: between September and December 2026
Main References
[1] Ijspeert, A. J. “Central pattern generators for locomotion control in animals and robots: a review.” Neural Networks 21.4 (2008): 642-653.
[2] Vanderborght, B., et al. “Variable impedance actuators: A review.” Robotics and autonomous systems 61.12 (2013): 1601-1614.
[3] Pratt, J., et al. “Virtual model control of a bipedal walking robot.” Proceedings of ICRA. Vol. 1. IEEE, 1997.
[4] Ajallooeian, M., et al. “Central pattern generators augmented with virtual model control for quadruped rough terrain locomotion.” 2013 IEEE ICRA. IEEE, 2013.
[5] Larby, D., and F. Forni. “Optimal Virtual Model Control for Robotics: Design and Tuning of Passivity-Based Controllers.” IEEE Transactions on Robotics 42 (2026): 439-454.
Master’s Thesis/Semester Projects Proposals (Fall 2026)
- ML, LLMs
- Robotic data processing

- Mechanical engineering, Robotics, Sensors
- Python
Master’s Thesis/Semester Projects Proposals (Summer 2026)
- ML, LLMs
- Robotic data processing
- Mechanical engineering, Robotics, Sensors
- Python
Bioinspired Robotic Knits: 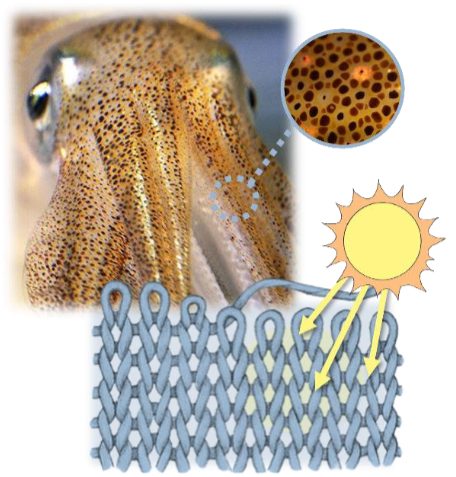 Mimicking Cephalopod Skin for Adaptive Solar Shading
Mimicking Cephalopod Skin for Adaptive Solar Shading
Description — Solar heat through windows
require heavy cooling inside buildings, and can
cause occupant discomfort. Conventional
adaptive shading systems such as motorised
blinds rely mostly on rigid mechanisms that are
costly, loud, prone to failure, and aesthetically
limiting. Nature offers a beautiful alternative:
cephalopods such as squid achieve remarkable,
continuously variable light control by
dynamically tuning the size of pigment-filled skin
organs called chromatophores.
This project takes direct inspiration from this
mechanism to develop knitted textile facade
panels that replicate the same behaviour
through stitch geometry, embedding coloured elastic membranes behind the apertures
of knitted structures and actuating the panels with external pneumatic muscles. The goal
is to build a low-tech, climate-responsive facade design that is scalable, recyclable, and
manufacturable with conventional textile tools. The project has three core objectives:
1. Design and fabricate:
• A set of knitted/crocheted tile samples across varying stitch types, densities, and
aperture geometries.
• A pneumatic actuation mechanism for the knitted tiles.
• An optical characterisation setup with varying lighting, integrating light/colour
sensors and/or image-based analysis.
2. Characterise how stitch parameters jointly control shading ratio and colour
appearance across actuation pressure sweep. Obtain a forward design map from
fabrication parameters to optical / shading performance.
3. Validate the forward design map on a live facade panel prototype that visibly
shifts colour and transparency in response to a pneumatic input.
A possible extension is the development of an inverse design pipeline that optimises
stitch layout and panel placement with respect to sun position throughout the day.
Workload: 20% Actuation mechanism and test setup. 40% Sample fabrication and
characterisation. 40% Data analysis, forward design map and validation.
Requirements: Creative, motivated student with interest in soft matter, fabrication, or
architectural engineering. Basic programming skills (Python). Basic prototyping skills. No
prior crochet/knitting experience is required although recommended. The student must
be ready to learn how to hand knit/crochet, or use a simple knitting machine.
Contact: Juliette Hars, [email protected], Sergio Picella [email protected].
To apply, please include a short motivation for this specific project, your CV, and your
transcript.
Master’s Thesis/Semester Projects Proposals (Spring 2026)
We have updated the thesis/semester project offers. Please e-mail the listed contacts directly.
Please tell us your motivation to the specific project, your skillsets and past experiences + something that shows that (CV, website, photos, videos, github, etc), and your transcript.
Students from all research backgrounds are welcome – for example, mechanical engineering, bioengineering, computer science, materials etc.
You can also find this webpage here in another format
Updated January 2026
(Semester project) Seamless integration of hand pose sensors into a medical gloveDescription — This project aims to develop a seamless sensing medical glove for hand pose estimation of surgeons to enable next-generation smart surgical environments. The goal is to integrate hand and finger pose sensors into a surgical glove without compromising comfort, dexterity, or sterility, while accurately capturing dexterous hand movements during surgical procedures. This project involves design of hand pose sensor, integration of sensor to a medical glove and hand pose estimation through experiments.20% Fabrication of hand pose sensors 30% Fabrication of sensorized medical glove 30% ExperimentsRequirements — Prototyping skills (3D printing), electronics skills (microcontroller), basic programming skillsContact — Haewon Jeong ([email protected])To apply, please include a short motivation for this project, as well as a copy of your CV and transcripts.
(Master thesis) Surgeon test bed : Self-healing phantom for suture practiceIn collaboration with CyRIS Lab in Max Planck Institutes (https://is.mpg.de/cyris)Description — Suture training is essential in medical training of surgeons. However, it is hard to monitor and assess suture quality using the current suturing pad which is normally made of silicone. Since quantitative measuring of suture placement, damage and recovery time is absent. Thus developing a robotic phantom that is capable of self-healing and sensing is needed so that it can measure damage, suture placement and recovery time. By using self-healing hydrogel with electrical impedance tomography, we are aiming to measure the resistance change of the full surface and reconstruct the image of damage such as cutting, suture placement, etc and also monitoring the recovery time of hydrogel. At the end of the project, the developed phantom will be tested by surgeons and surgical robots in Max Planck Institutes for user study.30% Design and fabrication of phantom, 20% Programming of microcontrollers, and 20% Image reconstruction of damage, 20% User study with surgeonsRequirements — Prototyping skills (3D printing, molding), electronics skills (microcontroller), programming skills (python, MATLAB)
Contact — Haewon Jeong ([email protected])To apply, please include a short motivation for this project, as well as a copy of your CV and transcripts.
(Semester project) Development of fingertip haptic device and and optimal mapping method of high dimensional tactile data to lower dimensional haptic feedbackDescription — Tactile feedback in teleoperation of robot hand is essential for intuitive control and immersive environment. However the number of sensing modality and haptic modality are not always matching. Normally, in most cases, the number of sensing modalities is bigger than the number of haptic modalities. And this cause a problem of tactile data loss. Thus we are aiming to develop haptic device and optimal mapping methods to deliver a greater number of tactile sensations than those physically supported by the haptic device. For example, by modulating frequency, amplitude sequence of piezo actuators, it will be possible to deliver greater variety of modalities than vibration itself. e.g. delivering Normal/Shear force, contact area. At the end, to test the performance of the developed haptic device and tactile mapping method, user study on grasping of various objects will be conducted in teleoperated robot hand.20% Integration of piezo haptic actuators to wearable device, 30% Signal processing 30% Investigation of tactile mapping, and 20% Userstudy of tactile mapping methodRequirements — Prototyping skills (3D printing), electronics skills (microcontroller), basic programming skillsContact — Haewon Jeong ([email protected]) Jaemin Eom ([email protected])To apply, please include a short motivation for this project, as well as a copy of your CV and transcripts.
Title: (Master Thesis/Semester) Aligning Robot Design with Human Intent via LLMs
Description: Current generative design frameworks rely on complex mathematical cost functions that are difficult for humans to intuit. This project aims to bridge the gap between human intent and automated optimization by building a system that maps high-level natural language (e.g., “make the gripper broader”) and UI interactions into mathematical constraints. You will develop a frontend interface (likely using MeshCat or Three.js) to capture user input and implement an LLM pipeline to translate these prompts into quantitative objectives for our diffusion-based design process.
Requirements:
- Strong Python skills.
- Experience with LLMs (prompt engineering, API integration).
- Experience with robotics visualization tools or 3D web frameworks (e.g., MeshCat, Three.js).
Contact: Andrew Wilhelm ([email protected]) — To apply, please include your CV, transcripts, and a short motivation statement.
Title: (Master Thesis/Semester) Optimal Sensor Placement for Dexterous Manipulation
Description:
A robot’s capability for complex manipulation is fundamentally limited by its sensory feedback. While placing sensors on fingertips is a common heuristic, the specific distribution of sensor modalities (touch, torque, tactile arrays) determines how effectively a robot can execute complex tasks. This project investigates the co-dependency between morphology and sensing. You will implement tactile and torque sensor models in a rigid body simulator (e.g., MuJoCo/Isaac Gym) and develop optimization algorithms to select the ideal sensor layout for generated topologies to maximize information gain.
Requirements:
- Experience with physics simulators (MuJoCo, Isaac Gym, or PyBullet).
- Understanding of optimization techniques.
- Proficiency in Python and data analysis.
Contact: Andrew Wilhelm ([email protected]) — To apply, please include your CV, transcripts, and a short motivation statement.
Title: (Master Thesis/Semester) Universal Control Policies for Generative Robot Morphologies
Description:
Scaling control policies to handle the high variance in generated robot topologies remains a significant challenge. This project focuses on developing general-purpose controllers capable of operating across a diverse population of morphologies. You will leverage latent space alignment to map the geometry of generated robots directly to shared policy spaces, training universal Reinforcement Learning policies that adapt zero-shot to new designs. Additionally, you will implement a co-optimization loop where control performance feeds back to guide the physical evolution of the robot.
Requirements:
- Strong background in Reinforcement Learning (RL) or Optimal Control.
- Proficiency with PyTorch or JAX.
- Familiarity with rigid body dynamics and simulation environments.
Contact: Andrew Wilhelm ([email protected]) — To apply, please include your CV, transcripts, and a short motivation statement.
Title: (Master Thesis/Semester) Generative Design of Compliant Manipulators
Description:
Most automated design tools assume robots are made of rigid blocks, but biological systems rely on compliance (softness) for dexterity. This project extends our generative graph framework to include soft materials and compliant mechanisms. You will investigate suitable representations (such as hybrid graphs or meshes) for flexible components and integrate simulation methods capable of handling compliance (e.g., FEM or simplified spring-damper models). The goal is to generate hands that utilize compliance to passively adapt to objects during grasping.
Requirements:
- Background in Mechanical Engineering, Physics, or Robotics.
- Interest in soft robotics, compliant mechanisms, or lattice structures.
- Programming skills (Python/C++).
Contact: Andrew Wilhelm ([email protected]) — To apply, please include your CV, transcripts, and a short motivation statement.
Title: (Master Thesis/Semester) Advanced Graph Diffusion for Robot Topology Generation
Description:
Traditional robot design follows a rigid, manual process that limits the exploration of novel topologies. This project builds upon a preliminary graph diffusion framework to automate this exploration, focusing on the deep learning core of the pipeline. You will refine the existing Graph Neural Network (GNN) architecture to better capture structural dependencies and implement guided diffusion features, such as text-conditioning or performance targets. The goal is to rigorously evaluate and improve the quality and validity of generated topologies against training datasets.
Requirements:
- Advanced knowledge of deep learning (specifically generative models/diffusion).
- Strong proficiency in PyTorch and Geometric Deep Learning (PyG).
- Solid mathematical foundation in probability and statistics.
Contact: Andrew Wilhelm ([email protected]) — To apply, please include your CV, transcripts, and a short motivation statement.
Title: Sim-to-real of a tendon-driven compliant humanoid
Description: Simulated environments serve as a backbone for robot learning, testing controllers, and robot Sim-to-real of a tendon-driven compliant humanoid development without the need of the real hardware. While traditional robots are commonplace in simulation, novel hardware is not yet standardized in simulated environments. In this project, you will work on developing a simulation of a tendon-driven compliant humanoid robot using the Isaac Sim environment. Starting from the robotic arms, you will gradually expand towards a full mobile-robot (N.B.: The humanoid here refers to a torso connected to a wheeled base, so legged locomotion is not considered in this project).Directions of the project (not all are part of the scope of the project, but depending on the progress, this can be varied):
- Development of a simulated tendon driven robotic arm
- Development of a simulated full-humanoid
- Sim-to-real matching with existing hardware
- Compliant interactions modelled in simulation
Useful skills/experience:
- Using Isaac sim (preferably on complex robots)
- Developing simulated robots
- Software engineering tools (linux, git, python)
- Familiarity with physical hardware
Contact: Kai [email protected](This is a joint project with the CREATE Lab and Embodied AI.)
Title: Humanoid teleoperation
Description: As capable humanoid robots become omnipresent, the ability to effectively operate one is a critical step towards putting such systems into performing useful tasks. Teleoperation serves as a key step towards immediate operation of such robots alongside a tool for data collection for learning based controllers. In this project, you will explore and develop teleoperation interfaces for a lightweight, tendon-driven humanoid robot. Starting from a leader-follower arm design, we will explore the possibilities of other control inputs and feedback mechanisms that can be implemented. Directions of the project (not all are part of the scope of the project, but depending on the progress, this can be varied):
- Leader-arm style control for a humanoid (two arms, head, torso, wheels base)
- Experiment on teleoperation interfaces (motion capture, velocity input, joysticks, etc)
- Experiment on feedback systems (haptic feedback, vibration, visual, etc)
- Benchmarking and quantitative analysis
Useful Skills/Experience:
- Working with real robots (prototyped and purchased)
- Mechatronics prototyping (integrating 3D prints, electronics boards, raspberry pi, etc)
Contact: Kai [email protected](This is a joint project with the CREATE Lab and Embodied AI.)
Title: Robot Learning
Description: Learning based controllers (specifically those based on imitation learning) present a promising direction towards autonomous applications in real world situations. Despite these advances, robots struggle on a number of fronts: long horizon tasks, recovery, large task adaptations, etc. For practical deployment, an intermediate step is considered human-supervised semi-autonomy, where a robot is able to execute small segments of autonomous tasks, which are coordinated by a human. In this project, you will explore how to blend cutting edge learning algorithms with teleoperation. Directions of the project (not all are part of the scope of the project, but depending on the progress, this can be varied):
- Explore state of the art learning based algorithm on real robots
- Implement and experiment on different transition methods between autonomous and teleoperated motion.
Requirements:
• Working with real robots (prototyped and purchased)• Implementation of learning based controllers• Software and embedded hardware interfacing
Contact: Kai – [email protected](This is a joint project with the CREATE Lab and Embodied AI.)
(Master Thesis / Semester Thesis)
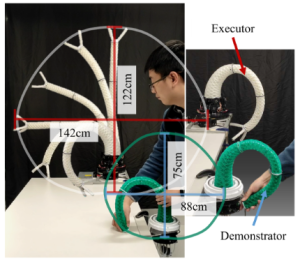
Imitation Learning & Reinforcement Learning with Soft Robot Arm for a Robot Manipulation Competition
Outline: This project focuses on developing manipulation policies for a soft robotic arm using Imitation Learning (IL) and Reinforcement Learning (RL). By leveraging the inherent compliance of soft robots, the system enables safer interaction with the environment and more effective exploration during learning.
The ultimate goal is to participate in the 2nd What Bimanuals Can Do (WBCD), held at ICRA in Vienna, Austria (June 1–5, 2026).
Competition website: https://wbcdcompetition.github.io/
Project Description
Soft robotic arms offer significant advantages in safety and compliance during physical interaction and RL exploration. In this project, we aim to develop robust control policies for a soft arm performing manipulation tasks. Data will be collected using a teleoperation system (see figure above), enabling human demonstrations for learning. The project may involve the following components: (1) System identification of the soft robotic arm. (2) Data collection via teleoperation. (3) Imitation Learning (like Vision–Language–Action models). (4) Post training / Reinforcement Learning for policy fine-tuning and performance improvement. Using these methods, our team will compete in the 2nd WBCD competition in Vienna.
Our Track Record: Our team won 1st place in the WBCD 2025 – Bioscience Track, receiving the $50,000 Champion Award. Highlights: https://wbcdcompetition.github.io/#wbcd-2025-highlights
(Student will be resiponsible for part of the project.)
Requirements: ML, IL, RL, ROS, python, experimence with real robots.
Contact — Cheng Pan, [email protected], Qinghua Guan [email protected]
(Master Thesis / Semester Thesis)
Sim-to-Real Transfer for Robotic Manipulation via Policy Distillation and Domain Randomization

Outline: This project aims to develop a robust and generalizable policy for robotic manipulation using Reinforcement Learning (RL), transferable from simulation to the real world.
Background:
For robotic manipulation, policies trained using RL can result in more general and robust dexterous skills. However, transferring these policies from simulation to the real world—known as the sim-to-real gap—presents challenges:
State Representation Mismatch: In simulation, full state information (e.g., object and manipulator poses) is available, whereas in the real world, only partial observations such as RGB images and robot proprioception are accessible. To bridge this gap, we need to distill the learned policy into one that can operate using real-world observations.
Behavioral Mismatch: The behavior of the robot in simulation often differs from that in the real world. Domain randomization is necessary during training to account for these discrepancies and improve policy transferability.
Work Package:
In this project, we will first train a policy using RL for a robotic manipulation task, leveraging privileged information during training. Domain randomization techniques will be applied to mitigate the sim-to-real gap. Once the policy is trained, we will distill it into a version that relies only on RGB images and proprioception. Finally, we will evaluate the policy on a real-world robotic system.
Note that we have already a well-developed pipeline for a grasping task (from a semster project from last semester). The student will learn to use this pipeline and extend to more challenging experiments in this project.
literature review about most recent related work 10%, simulation for robotic manipulation 40%, algorithms development and implementation 50%.
Requirements: simulator isaacsim / isaaclab, python, ML, IL, RL, experimence with real robots.
Contact — Cheng Pan, [email protected]
To apply, please include a short motivation for this project, as well as a copy of your CV and transcripts.
(Master thesis/Semester project) Task-optimal synergy emergence in human, animal and synthetic hand morphologies

Description – Human and animal hands rely on numerous and complexly integrated actuators, the muscles.
To reduce the load and complexity of the processing, apes and humans rely on the coupling of multiple joints to a single motor unit, forcing them to move in a pre-defined, coordinated patterns, called synergies.
The synergies and their properties emerge partly from the repetition of tasks performed, and thus are specifically optimized. Using a similar logic, in the context of the current race for humanoid robots, the same concept of synergies is used: reducing the number of actuators to remove mechanical and processing load. To maximize the robotics hands capabilities, methods exist to derive optimal human-designed synergies. However the following question remains: How can we derive the optimal synergies for non-human hands, such as: chimpanzee hand, gorilla hand or synthetic hand morphology, such as a hand with 2 thumbs or 7 fingers? The goal of this project is to explore this question, using the Open Parametric Hand as testing platform, a customizable, dexterous robotic hand (and Open Source: https://github.com/kg398/100_fingers) to rapidly manufacture and test arbitrary anthropomorphic hand morphologies.
Answering this question would push the knowledge boundaries in the quest for more capable robotic manipulators, along with expanding our understanding on how the morphology and behaviours are shaped by the environment and morphology itself during evolution.
Requirements –
Curiosity, motivation, and interest.
Programming experience (e.g. Python/ MATLAB)
Workload –
Literature review (15%)
Method Elaboration(40%)
Hand Fabrication (20%)
Experimental validation (25%)
Contact – Robin Carlet ([email protected])
To apply, please contact me directly by email ([email protected]) including the project title, CV, and academic transcripts. A brief interest/motivation letter is welcomed.
(Master thesis/Semester project) Accessible and repeatable conductive coating for sensorized 3D-lattice structure
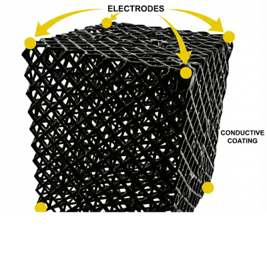
Description – This project explores the development of a cost-effective and reliable method to apply a conductive coating to 3D-printed lattice structures. By coating these structures with a layer of conductive material, the lattice is transformed into a piezoresistive sensor: when the structure is under strain/compressed, its electrical resistance is altered, allowing for real-time sensing of the structure, for proprioception and external load sensing.
The objectives of the project would be:
Accessibility: Utilize accessible materials for the conductive coating.
Repeatability: Establish a standardized application process (dip-coating/spray-coating) to ensure consistent electrical properties across multiple batches.
Functionality: Demonstrate the ability of the sensorized lattice to act as a proprioceptive and external load sensor in an actuated 3D lattice structure.
In the pursuit of self-sensorized structures, the development and characterization of this conductive coating process will significantly advance applications in sensorized lightweight soft manipulators, integrated flexible sensors, and next-generation wearables.
Requirements –
Curiosity, motivation, and interest.
Basic CAD experience.
Workload –
Literature review (10%)
Design of experiment (20%)
Fabrication (45%)
Experiment/Data analysis (25%)
Contact – Robin Carlet ([email protected])
To apply, please contact me directly by email ([email protected]) including the project title, CV, and academic transcripts. A brief interest/motivation letter is welcomed.
(Master thesis/Semester project) Geometry-Driven Design of EIT-Enabled Synthetic Skins
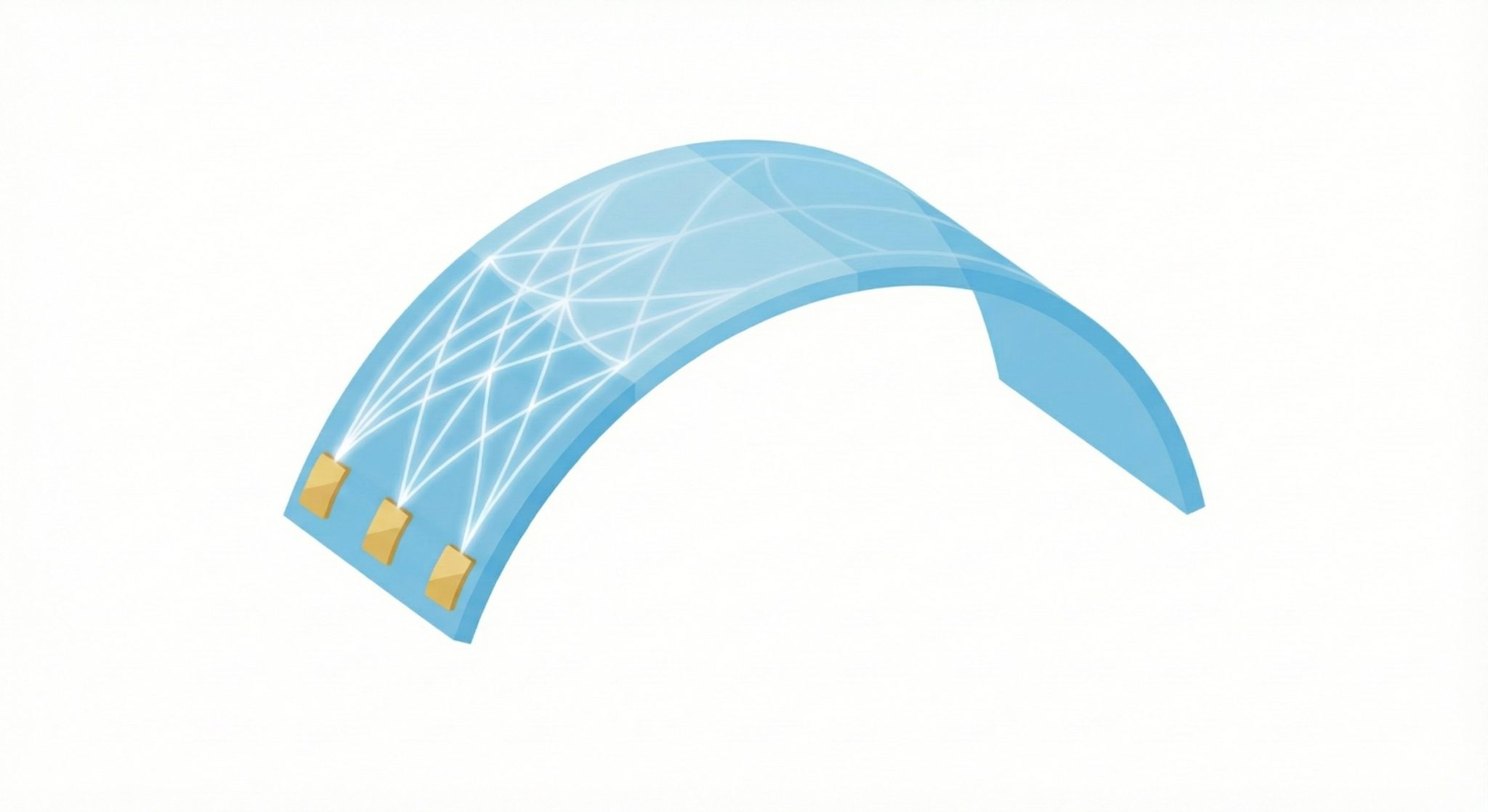
Description – Electrical Impedance Tomography (EIT) is a non-invasive sensing method historically used for imaging biological tissues and physiological changes within the human body.
Nowadays, it offers a promising path toward artificial sensorized skins, but transitioning from flat surfaces to complex 3D geometries introduces significant sensing challenges. On high-curvature surfaces, such as robotic fingertips, the curvature combined with sub-optimal electrode placement often results in zones of low sensitivity, where the structure is least responsive at the points of greatest importance.
This project focuses on characterizing how physical surface geometry impacts EIT signal sensitivity, particularly investigating the relationship between mechanical shape and electrode configuration to identify the factors that degrade performance on curved structures and, based on these findings, investigate strategies to improve them.
Ultimately, this project aims to provide a set of practical design rules and heuristics that enhance the integration of EIT skins into future robotic and wearable devices.
Requirements –
Curiosity, autonomy, and interest.
Basic CAD experience.
Programming experience (e.g. Python/ MATLAB).
Workload –
Literature Review (10%)
Design of Experiments (10-25%)
Experimental setup design and fabrication (25%)
Python modeling (10-25%)
Experiment/Data analysis (25%)
Contact – Robin Carlet ([email protected])
To apply, please contact me directly by email ([email protected]) including the project title, CV, and academic transcripts. A brief interest/motivation letter is welcomed.
(Master Thesis) Evaluation of AI-Generated Robot Hand Designs


Description – Recent advances in AI have made it possible to automatically generate diverse robotic hand designs from high-level task descriptions. While such approaches promise to accelerate robot design, a fundamental challenge remains: how to determine whether an AI-generated robot hand is actually effective, and how performance feedback can be used to improve future designs. This project studies evaluation and feedback mechanisms for AI-generated robot hands within an AI-driven robotic design pipeline.
The focus of this project is to investigate how AI-generated robot hand designs can be evaluated in diverse ways by combining visual feedback, such as camera observations, and simulation signals, such as physical interaction metrics. The student will explore different evaluation signals including task performance, physical contact forces, and visual occlusion, and implement a lightweight feedback pipeline that supports iterative design refinement.
Requirements – (1) Programming background; (2) Familiarity with physics simulators such as MuJoCo, Isaac Sim, or similar platforms; (3) Experience with URDF/MJCF, CAD tools, or parametric modeling is a plus
Contact – Dr. Yanyuan Qiao, [email protected]
To apply, please include a short motivation for this project, along with your CV and transcripts.
Reference – Qiao et al., Lang2Morph: Language-Driven Morphological Design of Robotic Hands.
(Master Thesis) Imitation Learning & Reinforcement Learning for Robotic Manipulation
Outline: This project aims to study state-of-the-art learning from demonstration (RL, IL) methods for robotic manipulations.





Description: Reinforcement Learning (RL) and Imitation Learning (IL) methods have been widely applied to robotic manipulation. Given a demonstration dataset, we can estimate a reward function—either from scratch or using prior reward features—or estimate a value function. Based on the estimated reward or value function, a policy can then be learned (Inverse RL, RL, or Generative Adversarial learning). Alternatively, we can learn a policy directly from demonstrations using state-of-the-art models, including diffusion models, flow-matching models, and pretrained Vision-Language-Action (VLA) models.
Our goal is to study which methods are most effective for various robotic manipulation tasks under different dataset sizes. We plan to first implement state-of-the-art RL and IL methods for robotic manipulation tasks in Isaac Lab, with potential extensions toward developing new policy-learning algorithms or deploying the learned policies on a real-world robot hand or gripper.
Requirements: ML, RL, Isaac-Lab, python, Git.
Contact — Cheng Pan, [email protected]
To apply, please include a short motivation for this project, as well as a copy of your CV and transcripts.
(Master Thesis) Multi-Modal Robotic Perception via Self-supervised Representation Learning



Description: Multimodal sensing is essential for human-like perception, as complementary modalities provide richer structural and semantic cues than RGB images alone. Yet, most existing large-scale datasets include only a limited set of modalities, making it difficult to study multimodal learning in realistic robotic settings.
In this work, we will use a TurtleBot-based platform for collecting multimodal data in indoor environments. The system integrates RGB-D, thermal, LiDAR, IMU, odometry, and other proprioceptive sensors, enabling the creation of a compact yet diverse dataset tailored for domain-specific applications. We already have initial results on the collected data, with a focus on thermal image tokenization, showing that thermal frames can be effectively aligned with RGB data using pretrained tokenizers. Looking ahead, we aim to extend the training pipeline toward cross-modal representation learning with non-visual modalities such as LiDAR and IMU, and to evaluate the learned features on downstream tasks including semantic segmentation, object detection, and navigation. Beyond robotic perception, a potential extension could be vision-language-action (VLA) based manipulation, incorporating tactile sensing to support richer embodied interactions. Our ultimate goal is to build specialist multimodal models for small-scale indoor robotics and manipulation applications.
Requirements: ML, Computer Vision, python, ROS, Git.
Contact — Cheng Pan, [email protected]
To apply, please include a short motivation for this project, as well as a copy of your CV and transcripts.
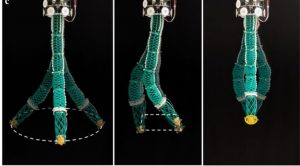
Virtual Model Control of a Soft Compliant Manipulator

Soft continuum robotic arms offer unparalleled dexterity and compliance over rigid bodies, thus facilitating safe and robust interactions with environments. These characteristics make them ideal for diverse applications, such as collaborative robotics or medical contexts. However, due to their virtually infinite degrees of freedom, control of these systems has always been a challenge.
Various control strategies have emerged, ranging from kinematic controllers to data-driven methods. However, most approaches disregard the inherent compliance of the robot. They impose artificial rigidity on the system, eventually negating the structural flexibility that constitutes its primary advantage. As the main intelligence of the robot is naturally embodied, the control architecture must align with the system’s nature. Therefore, we propose a compliant control framework that eliminates rigidity assumptions, treating the soft robot as a medium for environmental interaction.
Virtual Model Control (VMC) offers a novel framework for addressing these requirements, and it has already been applied to legged locomotion and rigid manipulation. VMC involves superimposing a virtual mechanical system onto the physical hardware to generate control forces. Instead of rigidly dictating position, this approach acts as a flexible guidance mechanism giving the robot suggestions rather than commands. This ensures inherent stability and allows for intuitive adaptation across diverse interaction tasks.
In this project, we will implement this model-based strategy for force control of a continuum manipulator. The cable-driven soft robotic arm comprises three independent modules, and each module is actuated independently with three cables. We will first derive a Piecewise Constant Curvature (PCC) kinematic model based on motor encoder feedback. Subsequently, we will design tailored Virtual Models that apply virtual forces to the robot’s central axis. Validation will focus on the robot’s ability to achieve target goals while maintaining compliant interaction with external obstacles. Finally, the project will explore data-driven optimization (online or offline) to adaptively tune model parameters for enhanced performance.
Requirements
- Highly motivated for the topic
- Programming experience (Python, MATLAB)
- Knowledge of robotics and control theory
- Familiarity with ROS is a plus
- Practical experience in robotics applications is a plus
- Strong interest in academic research is a plus
Workload
20% Literature review, 40% Software development, 40% Real world robot deployment
Main references
[1] Chen, Guangrong, et al., Virtual model control for quadruped robots, IEEE Access 8 (2020): 140736-140751.
[2] Zhang, Yi, et al., Virtual model control for compliant reaching under uncertainties, 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2024.
[3] Pratt, Jerry, Peter Dilworth, and Gill Pratt., Virtual model control of a bipedal walking robot, Proceedings of international conference on robotics and automation. Vol. 1. IEEE, 1997.
[4] Della Santina, Cosimo, et al., Dynamic control of soft robots interacting with the environment, 2018 IEEE International Conference on Soft Robotics (RoboSoft). IEEE, 2018.
[5] Guan, Qinghua, et al., Trimmed helicoids: an architectured soft structure yielding soft robots with high precision, large workspace, and compliant interactions, npj Robotics 1.1 (2023): 4.
Contact
Lorenzo Vignoli, [email protected], EPFL
To apply, please include:
- A short motivation letter regarding this project
- A copy of your CV and academic transcripts
Master Thesis Project: Soft Robotic Finger with EIT-based Shape Sensing

Unlike traditional rigid robots, soft robots offer a new paradigm for building safe and intelligent robotic systems. Their inherent compliance and deformability allow them to passively absorb shocks, store and release elastic energy, and conform to objects with complex shapes. This enables soft robotic grippers to grasp and manipulate objects of varying shapes in uncertain and dynamic environments with minimal risk of damage to either the object or the robot. Soft pneumatic fingers (e.g., PneuNet actuator) are a good example of embodied intelligence, where the morphology and material properties of the soft body naturally offload part of the control effort. However, sensing the shape and internal state of soft fingers remains challenging. Traditional sensing approaches often rely on embedding sensors (e.g., strain gauges, fiber optics) directly into the soft structure, which challenges fabrication and structural integrity, and may face air leaks.
This project aims to design and prototype a pneumatically actuated soft robotic finger with intrinsic shape sensing based on Electrical Impedance Tomography (EIT). EIT is a promising technique that reconstructs the internal conductivity distribution of a soft, conductive body from boundary voltage/current measurements. By instrumenting a conductive soft finger with surface electrodes, EIT can be used to infer its 3D deformation and internal state. Leveraging this capability, the goal is to achieve closed-loop control of a soft robotic gripper, where EIT-based shape sensing provides feedback for robust, sensorized grasping and manipulation.
The student will work on the full pipeline from hardware design and fabrication (PneuNet-type actuator and electrode layout) to data acquisition, EIT-based shape estimation, and basic closed-loop control of grasping tasks.
- Work packages:
- Design and Fabrication of the Pneumatic soft finger.
- Electrode placement and optimization.
- Data collection and shape estimation.
- Closed loop control of the soft gripper.
- Workload: 10% – literature review, 20% – hardware fabrication and prototyping, 40% – robot control and implementation, 30% – data processing and analysis
- Your Profile:
- Interest in sensor design, soft robotics and machine learning for sensor data interpretation.
- CAD design and fabrication skills (3D printing, SolidWorks, Fusion360 et al).
- MATLAB and python programming experience.
- Knowledge of pneumatic control systems (compressed air, vacuum) is a plus.
- We Offer:
- A unique opportunity to work at the forefront of soft robotics.
- Access to state-of-the-art robotic platforms, including pneumatic regulatory systems, a UR5 arm, and a fully equipped robotics laboratory.
- The potential to contribute to a high-impact research publication
- Contact:
Huijiang Wang, [email protected]To apply, please directly send emails which include a short motivation for this project, as well as a copy of your CV and transcripts to [email protected]
Master Thesis Project: Programmable Lattice-Based Artificial Heart with Embedded Multi-Material Sensing for High-Fidelity Surgical Training
Research Focus
Developing a bio-realistic, sensor-embedded artificial heart using programmable lattice structures and multi-material 3D printing to enable high-fidelity surgical training with real-time feedback.
Background
Realistic surgical training requires organ phantoms that not only replicate the shape and softness of biological tissue but also provide quantitative feedback on surgical manipulation—pressure, incision depth, tool–tissue interaction, and deformation patterns. Current heart phantoms used in medical training are typically made of homogeneous silicone or hydrogel materials. Although soft, they lack the heterogeneous mechanical response of real cardiac tissue and provide no internal sensing capabilities.
Recent advances in programmable lattice metamaterials enable the design of soft structures with tunable anisotropy, spatially varying stiffness, and organ-specific mechanical responses. Meanwhile, inverse co-design of mechanical and sensory properties, as demonstrated in the two referenced papers, allows lattice structures to function as both structural and sensing elements.
This thesis aims to combine these innovations to create the first lattice-based artificial heart with embedded sensing channels, capable of providing realistic mechanics and real-time feedback for surgical training applications such as suturing, catheter insertion, tissue manipulation, or valve repair.
Conceptual Figure

Thesis Description
This project builds directly on two major research directions:
- Programmable geometric topology and anisotropy in lattice structures (Guan et al., Sci. Adv. 2025)
- Inverse co-design of mechanics and sensing in soft lattice foams (Guan et al., Adv. Sci. 2025)
The objective is to engineer a soft, deformable, and sensorized artificial heart, where the internal lattice architecture and embedded sensor pathways are co-designed to match the nonlinear, directionally dependent mechanics of cardiac tissue.
As a Master’s student, your main tasks will include:
- Organ-Specific Lattice Design
- Use Topology Regulation (TR) and Superposition Programming (SP) to design graded lattice regions replicating different cardiac layers (myocardium, endocardium, papillary muscles).
- Tailor anisotropic compliance to mimic cardiac fiber directions and pressure–volume mechanics.
- Integrate hollow channels and sensor paths directly into the lattice.
- Multi-Material 3D Printing of the Artificial Heart
- Fabricate the heart using soft elastomers (core) and conductive/strain-sensing materials (sensing pathways).
- Employ multi-process additive manufacturing (FDM, SLA, DLP, and multi-material printers) to create a fully integrated organ phantom with embedded sensing networks.
- Develop procedures for embedding stretchable conductors, capacitive layers, or piezoresistive traces inside the lattice.
- Embedded Sensing System & Instrumentation
- Implement a sensing architecture capable of detecting:
• local deformation
• pressure distribution
• tool–tissue interaction forces
• suturing tension - Characterize the relationship between applied surgical actions and sensor outputs.
- Evaluate real-time feedback for typical cardiothoracic training tasks.
- Mechanical and Sensory Characterization + Data-Driven Optimization
- Build an experimental testing platform for compressive, tensile, and shear loading of the lattice heart.
- Record sensor responses under controlled surgical manipulation scenarios.
- Train machine learning models (e.g., regression, neural networks) to map sensor data to physical actions.
- Optionally use inverse co-design to refine the lattice architecture for improved realism and sensing accuracy.
Your Profile
- Enrolled in a Master’s program in Mechanical Engineering, Robotics, Biomedical Engineering, Mechatronics, or a related field.
- Strong interest in soft robotics, biomechanical modeling, and advanced 3D printing.
- Experience with CAD; familiarity with lattice design is advantageous.
- Basic programming skills (Python/MATLAB) for data acquisition and sensor data processing.
- Motivation to work in both fabrication and experimental characterization.
- An analytical, creative, and hands-on approach to engineering problems.
We Offer
- A cutting-edge project that sits at the intersection of soft robotics, biomedical simulation, and sensor technology.
- Access to state-of-the-art fabrication tools:
• FDM, SLA, DLP, and multi-material 3D printers
• flexible electronic prototyping tools
• a robotics and biomechanics lab for testing and characterization - The opportunity to create a high-impact medical training technology with real-world applications.
- Close collaboration and supervision within a supportive research team.
Contact
Qinghua Guan
Email: [email protected]
EPFL
To apply, please include a brief motivation statement, your CV, and academic transcripts.
References
- Guan, Qinghua, et al. “Lattice structure musculoskeletal robots: Harnessing programmable geometric topology and anisotropy.” Science Advances 11, eadu9856 (2025).
- Guan, Qinghua, et al. “Inverse Co-Design of Mechanical and Sensory Properties in Soft Lattice Foams for Multifunctional Wearables.” Advanced Science (2025): e07102.
Master Thesis Project: Dynamic-Swing Walking Robot Arm Without Legs or Wheels
Research Focus:
Harnessing Architectured Soft-Material Dynamics and Base-Plate Oscillatory Locomotion to Realize a Legless, Wheel-less Mobile Manipulator
Background
Traditional mobile robots rely on explicit locomotion modules—legs, wheels, or tracks—to move the body, while manipulation modules (arms, grippers) perform tasks separately. This separation leads to large mechanical complexity, redundancy, and limited adaptability to unstructured environments.
Biological organisms, however, often merge locomotion and manipulation within a single continuum body—for example, octopus arms, elephant trunks, and snake bodies. These structures exploit body dynamics, friction modulation, swinging motions, and controlled vibration to move, interact, and manipulate simultaneously.
The recently introduced trimmed helicoid (TH) architectured materials enable unprecedented tuning of axial and bending stiffness, allowing soft robotic bodies to possess large workspace, robust compliance, and precise open-loop control. These characteristics make TH-based structures ideal candidates for whole-body locomotion driven not by traditional actuators but by dynamic body oscillations.
This Master’s thesis explores a new locomotion-manipulation paradigm:
A soft robot arm that “walks” by swinging its body and vibrating its base plate, creating directional frictional asymmetry to move across surfaces, while retaining its full manipulation capability.
This eliminates the need for any conventional legs or wheels, resulting in an extremely lightweight, low-cost, safe, and multifunctional mobile manipulator.
Thesis Description
This project leverages trimmed helicoid architectured materials and tendon-driven actuation to build a soft continuum arm that uses its own motion dynamics for locomotion. Inspired by dynamic walking, inchworm gaits, and vibration-based microbots, the system will integrate:
- A base plate capable of controlled vibration, swinging, and dynamic excitation,
- Frictional gait design using directional surfaces, anisotropic pads, or tuned base oscillation patterns.
As a Master student, your work will include:
- TH-Arm Structural & Dynamic Modeling
- Study how axial vs. bending stiffness affects natural frequencies, dynamic amplification, and locomotion efficiency.
- Simulate arm–base coupling to identify resonance-driven locomotion modes.
- Base-Plate Oscillatory Locomotion Design
You will design a programmable base plate capable of:
- lateral sinusoidal oscillation
- rotational vibration
- vertical tapping / hopping
- hybrid dynamic excitations
The objective is to create directional friction forces that translate vibration into forward, backward, and turning motion.
- Locomotion–Manipulation Integration
Unlike conventional systems, your robot must:
- Use arm postures to steer locomotion,
- Exploit compliance to adapt to uneven surfaces,
- Demonstrate simple tasks like object pushing, reaching, and pick-and-place during movement.
This includes developing a unified model that couples:
- tendon forces
- base oscillation parameters
- global locomotion direction and speed
- Prototyping & Experimental Validation
You will work with:
- A trimmed-helicoid soft arm (3 segments, tendon-driven, TPU-based, already be built)
- An optimized oscillatory base plate that generates asymmetric friction, steered by the swinging motion of the robot arm.
Experiments will evaluate:
- Locomotion speed vs. oscillation frequency
- Maneuverability (turning, reversing, obstacle crossing)
- Manipulation during motion
- Comparison against conventional continuum arms (non-locomoting)
Your Profile
- Currently enrolled in Robotics, Mechanical Engineering, Mechatronics, or related Master’s program
- Strong interest in soft robotics, embodied intelligence, and novel locomotion mechanisms
- Experience with CAD (SolidWorks / Fusion360)
- Background or willingness to learn additive manufacturing (TPU printing)
- Enthusiasm for hands-on building and experimental robotics
- Familiarity with dynamic systems, vibrations, or continuum robot modeling is a plus
We Offer
- Work at the forefront of soft locomotion and architectured materials
- Access to EPFL facilities, including soft robotics labs and high-performance 3D printers
- Close supervision from researchers at Create lab with in a supportive team.
- Opportunity to publish in soft robotics, metamaterials, or locomotion conferences/journals
- A unique chance to develop a legless walking robot arm
Contact
Qinghua Guan
EPFL – CREATE Lab
Email: [email protected]
To apply, please send:
- A brief motivation (why this topic?)
- CV
- Academic transcripts
Reference
Guan, Q. et al. Architectured Soft Manipulator with Open-Loop Control. NPJ Robotics, 2023.
Guan, Q. et al. Lattice structure musculoskeletal robots: Harnessing programmable geometric topology and anisotropy. Sci. Adv. 11, eadu9856 (2025).
(semester project): Designing a 3D parallel mechanism for manipulation (CLOSED)
Description: Designing a parallel mechanism for manipulation. The idea is similar to the figure and the video below. However, the design will be more complicated but the overall design is similar. The expected result would be 1. A completed robot that is able to move in 2D with the end-effector’s rotation fixed 2. A python script that achieves more than 100Hz output of the current x,y position of the end-effector. 3. (Plus) A simple gravity compensated control algorithm that holds the end-effector in space.

https://www.youtube.com/watch?v=ujgHWoPQt4c
Requirements:
- Hardware design + 3D Printing Experience
- Programming skills in python
- ROS experience is a plus
Contact (please cc all emails): Paul (Hung Hon Cheng) [email protected]
(Master Thesis) Design of a multi-modal robot for aerial-aquatic transitions
Description — This project focuses on developing a novel multi-modal robot capable of operating in both aerial and aquatic environments, with particular emphasis on seamless transitions and optimal performance in each domain. More specifically, the project will focus on developing a method to facilitate separation of the robot into two modules – one optimized for aerial locomotion and the other for aquatic operation. This modular approach aims to address the fundamental engineering challenges of bridging drastically different fluid dynamics, propulsion requirements, and control systems between air and water.
Key technical aspects include developing a reversible detachment mechanism, and/or designing the modules and control system to handle both flight and swimming modes. The resulting multi-modal robot is aimed at applications in environmental monitoring, search and rescue operations, and scientific research where access to both aerial and aquatic domains is essential.
This project involves 10% Literature Search, 40% Mechanical Design and prototyping, 20% Control and electronics implementation, 30% real-world experimentation (rough percentages)
Requirements — 3D CAD Experience, strong background in mechanism design, are confident working with electronics. Experience and confidence in programming is a bonus but not a must. This project is heavily hardware-based.
Contact — Kyle Walker ([email protected])
To apply please include a copy of your CV and transcript along with any other relevant information.
(Master Thesis/Semester) Data-Enabled Model Predictive Control for Compliant Manipulators
Description — Dynamic control of compliant manipulators is still an open challenge, with many of the current issues arising from the high degree of nonlinearities in system dynamics. Whilst the use of Model Predictive Control (MPC) has been increasing in conjunction with computing capabilities, the uptake in the space of compliant manipulators has been constrained by the inability to efficiently and effectively solve the optimization problem online using methods suitable for real-world deployment. This project will investigate these factors and aim to develop a fast, reliable and robust MPC framework for compliant manipulators. The overarching aim is to be able to modify the system dynamics online when accounting for factors such as operating environment (water/air) and hysteresis effects.
This project involves 20% Literature Search, 40% Simulation, 40% Experimentation (rough percentages)
Requirements — strong programming skills (MATLAB/Python/C++), knowledge of nonlinear system dynamics, experience with implementing model predictive control (more widely model-based control) in CasADi/Ocados. Wider knowledge of online optimization and learning techniques is a plus. Prior experience and confidence working with real experimental platforms is beneficial.
Contact — Kyle Walker ([email protected])
To apply please include a copy of your CV and transcript along with any other relevant information.
(Master Thesis) 3D Locking Manipulator Design

Description — In nature, when organisms change environments or perform different tasks they often have the ability to control their internal parameters (for example joint/body stiffness) to operate effectively. This project will explore how this phenomena can be implemented in a robotic system to design a manipulator which can either be extremely flexible or extremely rigid, depending on the task at hand or the environment it is operating in.
Specifically, the project will focus on the 3D case and include implementation of a control methodology for identifying when locking is required, subsequently applying the control signal to instigate this. The target scenario for this is when it is advantageous to constrain certain parts of the arm, expanding the workspace in-turn.
This project involves 10% Literature Search, 40% Mechanical Design and prototyping, 20% Control and electronics implementation, 30% real-world experimentation (rough percentages)
Requirements — 3D CAD Experience, strong background in mechanism design, are confident working with electronics and have solid programming skills. Experience with control algorithms (particularly for compliant/nonlinear systems) is a bonus but not a must.
Contact — Kyle Walker ([email protected])
To apply please include a copy of your CV and transcript along with any other relevant information.
(Master thesis/Semester project) Robotic Stomach Design
Description — Digestive malfunctions are linked to a variety of health conditions, including metabolic disorders, brain lesions, and gastrointestinal diseases. Current research in digestive systems lacks a reliable, controlled method to replicate the physical and mechanical processes of the human stomach. This thesis aims to design and prototype a robotic stomach that mimics the motions and environmental conditions of human digestion. By reviewing existing artificial stomach designs and integrating advancements in soft robotics, the research will create a minimalistic model suitable for replicating the mechanical digestive motions. 30% literature review, 50% prototype design and actuation,20% tests.
Requirements — 3D CAD experience (fusion, SolidWorks), fabrication skills for soft robotics, electronics skills (motor & pump control), programming skills (python, MATLAB)
Contact — Benhui Dai ([email protected]), Arnaud Klipfel ([email protected]).
To apply, please include a short motivation for this project, as well as a copy of your CV and transcripts.
Master Thesis Project: Lattice Multi-DoF Gripper for In-Hand Manipulation
Research Focus: Leveraging Multi-Material 3D Printing and Programmable Lattices to Develop High-Performance Musculoskeletal Robot Gripper.
Background:
The human hand remains the gold standard for dexterous manipulation, capable of exerting powerful forces while performing delicate tasks like writing or turning a key. This “in-hand manipulation” is enabled by a complex musculoskeletal system of rigid bones, soft ligaments, and tendons. Current robotic grippers are often either simple and rigid or complex and fragile, struggling to match this combination of strength, compliance, and dexterity. This project will develop a new design paradigm by using multi-material 3D printing to fabricate advanced lattice structures, creating robotic fingers that closely mimic biological principles for superior performance.
Thesis Description:
This project builds on our group’s groundbreaking work in programmable lattice metamaterials, specifically Topology Regulation (TR) and Superposition Programming (SP). These methods allow us to spatially program stiffness and anisotropy within a 3D structure. Now, we will advance this research by incorporating multi-material printing to seamlessly integrate rigid “skeletal” components and soft “ligamental, fat and muscle ” tissues in a single print.
As a Master’s student, your focus will be on designing and fabricating a multi-fingered, tendon-driven gripper capable of in-hand manipulation. Your work will involve:
- Finger Design: Using TR to create finger segments with graded stiffness—soft, compliant tips for secure grasping and rigid, structural segments for load-bearing. You will use SP to design discrete, joint-like lattice structures that provide precise rotational axes.
- Multi-Material Integration: Working with state-of-the-art multi-material 3D printers to co-print rigid polymers for the “bones” and soft, flexible elastomers for the “ligaments” and soft tissues within the lattice framework.
- Gripper Prototyping and Testing: Integrating tendon-based actuation to control the fingers. You will benchmark the performance of your musculoskeletal gripper against conventional designs, evaluating metrics like grasp stability, object manipulation dexterity, payload capacity, and robustness to impacts.
Your Profile:
- Enrolled in a Master’s program in Robotics, Mechanical Engineering, Mechatronics, or a related field.
- Strong interest in robotic manipulation, biomimetic design, and additive manufacturing.
- Proficiency in CAD software (e.g., SolidWorks, Fusion 360) is essential.
- Experience or a strong desire to learn multi-material 3D printing is a significant advantage.
- A hands-on, practical approach and a passion for building and testing complex robotic systems.
We Offer:
- A unique opportunity to work at the forefront of soft-rigid robotics and advanced manufacturing.
- Access to multi-material 3D printers and a fully equipped robotics laboratory.
- Close supervision and collaboration within an interdisciplinary team of experts.
- The potential to contribute to a high-impact research publication.
Contact
Qinghua Guan, [email protected], EPFL
To apply, please include a short motivation for this project, as well as a copy of your CV and transcripts.
Reference:
Qinghua Guan et al. ,Lattice structure musculoskeletal robots: Harnessing programmable geometric topology and anisotropy.Sci. Adv.11,eadu9856(2025).DOI:10.1126/sciadv.adu9856
Master Thesis Project: Programmable Lattice Skin for Multi-Axis Tactile Sensing
Research Focus: Engineering a Soft, Multi-Axis Tactile Sensor using Programmable Lattice Metamaterials and Multi-Material 3D Printing for Robotic Grippers and Hands.
Background:
Human fingertips possess a remarkable ability to perceive not just force, but its precise direction, location, and softness—a key requirement for dexterous in-hand manipulation. Current robotic tactile sensors often provide only basic force magnitude data and are challenging to integrate into complex, curved surfaces. This project aims to create a new class of “robotic skin” by leveraging the programmability of lattice metamaterials to build a multi-axis sensor that is sensitive, robust, and can be seamlessly conformed to the tips of robotic fingers and grippers.
Thesis Description:
This project bridges two cutting-edge research areas from our lab: the geometric programming of lattice structures (TR/SP) and the inverse co-design of mechanical and sensory properties. We will develop a tactile sensor where the lattice structure itself is the sensing element. By using Topology Regulation (TR) and Superposition Programming (SP), we can precisely engineer the deformation behavior of a soft lattice under load. When combined with a grid of capacitive electrodes, this programmed deformation translates into a unique, measurable signal pattern for different types of touches—normal presses, shears, and twists.
As a Master’s student, you will be at the forefront of this interdisciplinary challenge. Your work will involve:
- Sensor Design: Designing lattice unit cells (using TR/SP) that exhibit specific, directional compliance. Your goal is to create a lattice that deforms in a highly predictable and distinguishable way under multi-axis loads.
- Multi-process Fabrication: Utilizing 3D printing to fabricate a soft lattice sensor. This involves printing a soft, deformable lattice core, sandwiched between layers of soft, conductive electrodes, creating a fully integrated and robust sensory skin.
- Characterization and Data-Driven Optimization: Building a testbed to characterize the sensor’s response to multi-axis forces. You will use this data to train a model that maps capacitance changes from multiple electrode pairs to the applied force vector, and potentially use inverse design principles to optimize the lattice for specific tactile sensing tasks.
Your Profile:
- Enrolled in a Master’s program in Robotics, Mechanical Engineering, Mechatronics, or a related field.
- Interest in sensor design, soft robotics, and machine learning for sensor data interpretation.
- Experience with CAD and a strong interest in 3D printing (experience with multi-material printing is a plus).
- Basic programming skills (e.g., Python/matlab) for data acquisition and analysis are highly beneficial.
- An analytical and hands-on approach to problem-solving.
We Offer:
- A project at the intersection of advanced materials, sensor technology, and data science.
- Access to different types of 3D printer (such as FDM, SLA, DLP, and multi-material), flexible electronic fabrication and a robotics lab equipped for sensor characterization.
- The opportunity to develop a tangible, high-impact technology for dexterous robotics.
- Close supervision within a supportive and collaborative research team.
Contact
Qinghua Guan, [email protected], EPFL
To apply, please include a short motivation for this project, as well as a copy of your CV and transcripts.
Reference:
Qinghua Guan et al. ,Lattice structure musculoskeletal robots: Harnessing programmable geometric topology and anisotropy.Sci. Adv.11,eadu9856(2025).DOI:10.1126/sciadv.adu9856
Guan, Qinghua, et al. “Inverse Co‐Design of Mechanical And Sensory Properties in Soft Lattice Foams for Multifunctional Wearables.” Advanced Science (2025): e07102.
Extending the Energy Autonomy of robots in the Field by consuming biomass (Master/Semester Project)
Energy autonomy remains one of the primary limitations for long-duration robotic missions in natural environments. Conventional batteries restrict operational time and require access to charging infrastructure—conditions rarely met in remote or mountainous terrain. A promising alternative is to enable robots to generate energy directly from the environment, much like biological organisms.
Anaerobic digestion provides a pathway for converting locally available biomass into biogas, which can then be used to power onboard electrical systems. Our laboratory maintains fully instrumented 5-liter anaerobic bioreactors that allow real-time monitoring and control of digestion dynamics.
This project aims to develop online optimization algorithms that maximize methane production and energy efficiency in these bioreactors, with the long-term goal of integrating a compact digestion system into a mobile robot. Such a robot would be able to harvest and process biomass—grass, leaves, or other organic material encountered in the field—to replenish its energy supply and drastically extend mission duration in alpine or remote environments.
Working alongside a PhD student, you will design and evaluate data-driven control strategies—such as ε-greedy exploration, multi-armed bandits, and Bayesian Optimization—to autonomously regulate temperature, mixing, feeding, and other operational parameters. By enabling adaptive, sample-efficient optimization, the project contributes directly to the development of self-sustaining robotic platforms.
Note: if you can just pass by the lab and ask for Arnaud. Most likely I am here and we can talk.
Requirements
- Strong programming skills
- Background in optimization and/or Bayesian optimization
- Wet-lab experience is an advantage
Goals
- Assist the PhD student with bioreactor maintenance and operation
- Implement and test multi-armed bandit–type algorithms to optimize operational parameters under varying conditions
- Contribute toward maximizing feeding rates and overall methane production in the long term
Contact: [email protected] but better to just passby the lab and ask for Arnaud. I prefer to have in person talks to see if there is a good feeling.
Development and evaluation of a hydrogel-based artificial skin for dexterous manipulation in wet conditions (Master Thesis)

Motivation:
The skin on human hands plays an important role in dexterous manipulation as it directly interacts with the structural components (bones) of the hand and the object being manipulated. The human skin, after evolutionary optimization, is able to adapt to a wide range of manipulation tasks involving various surfaces, textures, and other environmental conditions such as temperature and humidity. One interesting phenomenon can be observed after an extended period of operation underwater: the skin absorbs water, expands and forms wrinkles. The wrinkles, enabling higher friction underwater, helps to improve manipulation performance in wet conditions.
Combining this observation with the recent advancements of robotic hand development leads to the research question: can we develop and verify an artificial skin with similar features for robotic hands?
Hydrogels serve as promising materials to build the artificial skin from, the properties can be tuned by varying the recipe and the humidity can be controlled by water absorption and electro-thermal-drying processes. Hydrogel can also be casted with custom molds to adapt to shape and form requirements.
Work package description:
This project aims to develop and verify the performance of an artificial skin that reversibly changes properties with varying humidity/wetness. The student will perform development tasks such as material selection, designing molds, optimizing fabrication processes, designing and performing experiments, and analysing collected data. The development process and findings will be documented in an academic report/thesis with the option to publish.
Available resources:
The project student will have access to:
- Equipment and materials for mechatronics fabrication such as 3d printers, soldering stations, tools, etc
- Supervision and advice from lab members with a diverse range of backgrounds and expertises
- A welcoming, fast-paced lab with good vibes and teamwork. 🙂
- (Potentially) a publication to contribute to the academic world and make real impact
Preferred skills/background for the project:
- Ability to work independently with occasional collaborations in a team environment
- Detail oriented and self-organized style of work
- Basic mechatronics development skills such as CAD(Solidworks, Fusion 360, etc), Mechatronics fabrication(3D printing, Laser cutting, Basic soldering, etc), Embedded programming (Arduino, STM32, etc), and software development (python, C, Matlab, etc)
- Previous chemistry lab experience related to material science and/or hydrogels will be a plus
- Good academic communication skills with English, both written and spoken.
Expected workload/effort:
- Weekly meetings lasting 30min-1hour, onsite(Lausanne) or remote(zoom).
Application:
Interested applicants should send their application to [email protected] and include the following information:
- Full transcript of both master’s (if applicable) and bachelor’s studies with preferably descriptions of course contents
- Resume(max 2 pages) with ideally a focus on previous projects (academic and extra-curricular)
- Personal portfolio/ website link if applicable
- Short 1 page self-introduction/motivation letter describing reason of interest and fit with the project.
Please prepare your email with title starting [Thesis Application][Your name]
Crack-Climbing Robot (Master Thesis/Semester Project)
This project focuses on the development of a robot capable of locomotion within cracks and crevices through sequential anchoring. A prototype anchoring mechanism already exists, designed to deform and adapt to cracks of varying geometries. By integrating multiple anchoring modules and enabling controlled translational motion between them, the system can achieve climbing through repeated cycles of anchoring, release, and repositioning.
The primary objective of this project is to refine and extend the current anchoring mechanism, improving its adaptability, reliability, and load-bearing performance. A subsequent task will involve designing and implementing the actuation strategy required to coordinate the anchoring and translational phases. If time permits, the final stage of the project will focus on assembling and testing a functional crack-climbing robot demonstrating the full sequence of climbing operations.
Field tests: because we want to test the system in real conditions, field test in the mountains will be conducted.
Note: if you can just pass by the lab and ask for Arnaud. Most likely I am here and we can talk.
Requirements
- Highly motivated
- Good design and mechanical skills : 3D printing, likes to tinker
- Basic knowledge of Arduino, servomotors, actuation
- Love for the mountains (half a joke)
Contact: [email protected] but better to just passby the lab and ask for Arnaud. I prefer to have in person talks to see if there is a good feeling.
Design of a Self-Anchoring Climbing Drone (Master Thesis)
Drones are increasingly used for surveying, data collection, and search-and-rescue applications. However, their effectiveness is limited by restricted battery endurance and the requirement for flat, stable landing surfaces, clear vision, and absence of wind. These constraints are particularly significant in rugged natural environments such as mountainous regions, where missions may involve extended operational periods and exposure to adverse weather.
This project investigates the integration of a self-anchoring mechanism into a drone platform, enabling it to secure itself within crevasses, cracks, or other surface irregularities on mountain faces. Anchoring would allow the drone to maintain a stationary position passively (no actual actuation to stay anchored) without continuous flight, providing opportunities for energy conservation, recharging, and environmental protection. When anchored, the drone could operate in a low-power monitoring mode, reducing energy consumption and extending mission duration. The aim of this project is to improve the operational reliability and endurance of drones used in challenging terrain.
Field tests: because we want to test the system in real conditions, field test in the mountains will be conducted.
Tasks (can change)
- Design of a light drone using fiber glass (frame, BLDC)
- Control using Pixhawk, ardupilot
- Fix the anchoring mechanisms
- Teleoperate to showcase the concept
- If time basic autonomous control
Requirements
- Highly motivated
- Good design and mechanisms skills : 3D printing, likes to tinker
- Experience with drone control : ardupilot, pixhawk (better)
- Love for the mountains (half a joke)
Contact: [email protected] but better to just passby the lab and ask for Arnaud. I prefer to have in person talks to see if there is a good feeling.
Modular Mechanical and Hardware Design of a Morphing Alpine Robot (Semester Project)

This project aims to advance a morphing alpine robot designed to adapt its body shape for effective locomotion across challenging mountainous terrain. The platform uses tendon-driven actuation to deform its structure, enabling dynamic shape changes that improve stability and mobility in uneven environments.
Your work will focus on refining the mechanical design, improving the tendon transmission pathways, and developing a modular hardware architecture. Because multiple versions and scales of the robot exist, an important objective is to derive fundamental design principles that ensure modularity, robustness, and scalability—both for larger structural variants and for scenarios where many units must be manufactured. Emphasis will be placed on creating a design that is easy to repair in the field, structurally resilient, and suitable for efficient reproduction in future research and deployment.
Field testing in alpine environments will be conducted to evaluate performance under real-world conditions.
Tasks
- Improve morphing mechanics and actuation for reliability (winches, rope, poulies)
- Replicate the robots
- Mechanical help for field tests
Requirements
- Highly motivated
- Good design and mechanical skills : 3D printing, likes to tinker
- Love for the mountains (half a joke)
Contact: [email protected] but better to just passby the lab and ask for Arnaud. I prefer to have in person talks to see if there is a good feeling.
Brushless DC Motor Integration on an Alpine Robot to extend mission autonomy (Semester Project)
Our alpine robot platform(s) is(are) designed to traverse challenging mountainous terrain, where energy efficiency, torque capability, and reliability are critical for mission success. The current prototype employs high-torque servomotors coupled with a timing belt system. While effective for initial testing, servomotors are suboptimal for sustained driving tasks: they consume power even when stationary, offer limited speed ranges, and do not support energy-efficient braking or passive states. DC brushless motors can also regenerate energy by being driven by an external force, this is called regenerative braking.
To enhance the robot’s autonomy and performance, this project focuses on replacing the existing actuators with Brushless DC (BLDC) motors—widely used in drones for their high power density, efficiency, and controllability. Your work will involve selecting appropriate BLDC motors, configuring and programming electronic speed controllers (ESCs), and designing the necessary mechanical interfaces, including gearing or reduction stages to achieve the required torque output. The goal is to deliver a robust, energy-efficient drive system tailored to the demands of alpine locomotion.
Tasks
- BLDC integration
- General help to design morphing alpine robot
Requirements
- Highly motivated
- Good design and mechanical skills : 3D printing, likes to tinker, gear reduction design experience
- Experience with BLDC or various motors
Contact: [email protected] but better to just passby the lab and ask for Arnaud. I prefer to have in person talks to see if there is a good feeling.
(Master thesis/Semester project) Wearable devices to enhance sensations for robotics
Description — Wearable devices and smart gloves are revolutionizing human-machine interaction and robotic control. This project aims to develop wearable devices to enhance the sensing capability of robotic hands. Our goal is to gain in-depth understanding of human behaviour and human-machine-environment interfaces. The focus will be on innovative sensor integration (force, bending, temperature, proprioception, etc.), comfortable ergonomic design (wearables like gloves for both human and robot), and real-time data transmission and interaction with robotic hands.
20% Sensor/actuator design and fabrication, 30% Wearable device integration and development, and 50% Software and data analysis.
Requirements — programming skills (python, MATLAB), knowledge of control systems, computer vision systems, and machine learning.
Contact — Benhui Dai ([email protected])
To apply, please include a short motivation for this project, as well as a copy of your CV and transcripts.
(Master thesis) Chewing robot with sensory-motor controlSummary: The process of chewing food is achieved through the up-and-down movement of the jaw and the shearing movement of the teeth. We have developed a 6 DOF chewing robotic platform, including the mouth, jaw, and tooth. The goal is to simulate the mechanical movements of humans chewing by robots and monitor this process by force sensors and cameras. What’s more, artificial saliva and a soft robotic tongue will be embedded into the system to provide a biomimetic oral environment for better food-robot interaction.Workload: 50% control, 30% data processing and analysis, 20% hardware design and fabricationRequirements — programming skills (python, MATLAB), knowledge of control systems (PID control, CPG control), and better machine learning.Contact — Benhui Dai ([email protected])
(Master thesis/Semester project) Tactile e-skin sensing with EIT
Description — Tactile sensing plays an esstential role in dexterous human and robotic manipulation, providing feedback for adapting to the real world. Electrical Impedance Tomography (EIT) is an imaging technique that measures the conductivity, permittivity, and impedance of an object. It works by attaching electrodes to the surface of the object and then using the electrodes to either inject current or measure the resulting voltages. Interpolating the raw signals then results in an image of the object’s internal conductivity. This project will be about developing the EIT technology for e-skin, pcb development, testing, interpreting and leveraging tactile images to solve manipulation problems.
20% electronics development, 30% robotic system integration, 50% data processing and control system development.
Requirements —machine learning, knowledge of microcontrollers, solid programming skills (python, matlab), and electronics experience (pcb development ideal) is a plus
Contact — Benhui Dai, [email protected]
To apply, please include a short motivation for this project, as well as a copy of your CV and transcripts.
(Master thesis/Semester project) (re)Generative Design of Robots Models

Figure 1. Example of data generation for collision models
Description — Foundation models have shown great results in generation of multi modal outputs such as text and images. However, to be able to leverage the new advances in large models for tasks such as robot generation, we require a large amount of well defined robot data for fine tuning, training and testing. While there are many robot description data sets, most of them lack information such as inertias and collisions, which can be manually generated or could leverage the contextual information of an LLM. This project focuses on data collection and generation for generative design of novel robots. The project involves working with multi modal LLMs, large training datasets, and robot simulations. The student will have a chance to train and finetune models on high-grade consumer or server-grade GPUs.
Requirements —ML, python, robot simulation, URDFs, GIT, Docker
Contact — Valentin Yuryev, [email protected]
To apply, please include a short motivation for this project, as well as a copy of your CV and transcripts.
(Master thesis/Semester project) Guided and Structured LLM Output for Generative Designs

Figure 1. Robots produced by robo-grammar [1]
Description — Multi modal foundation models are capable of a wide range of outputs ranging from text to images. However, without being able to guide or structure the output, the models can be difficult to utilize. For simple structured python classes, there exist tools such as xGrammar that turn output into a finite state machine that confines the output of the LLM to specific format. We would like to explore this method and confine the LLM output to specific robot-based grammar for generative robot design. The pipeline would then be utilized by our generative networks to create new and novel robots. The project involves working with multi modal LLMs, large training datasets, and robot simulations. The student will have a chance to train and finetune models on high-grade consumer or server-grade GPUs.
Requirements —ML, python, robot simulation, URDFs, GIT, Docker
Contact — Valentin Yuryev, [email protected]
To apply, please include a short motivation for this project, as well as a copy of your CV and transcripts.
Reference —
https://dl.acm.org/doi/abs/10.1145/3414685.3417831
(Master thesis/Semester project) Data for State Estimation of Morphing and Compliant Robots


Figure 1. Robot rolling down a hill and simulated rolling
Description — Actively morphing and compliant robots show great promise of outdoor operation that can be utilized in environmental and agricultural industries. However, state estimation for such robots is complex and requires new approaches. One way is to record motion-capture data to then train a network that can predict states unique to morphing and compliant robots. However, motion capture data is difficult to obtain and requires time intensive post processing. We propose augmenting real data with simulation data to train robust state estimation that would work in all situations. The student is expected to simulate GOAT, our morphing and compliant robot, in simulation and train a simple state estimation network.
Requirements —ML, python, robot simulation (ex. Isaac, Mujoco), GIT, Docker
Contact — Valentin Yuryev, [email protected]
To apply, please include a short motivation for this project, as well as a copy of your CV and transcripts.
(Master thesis/Semester project) Simulation Environment for Underactuated Alpine Skiing Robot

Figure 1. Example of skiing simulation [1]
Description — Robot control has observed a significant boom in the last decade due to better computation platforms and use of ML, primarily RL, when designing controllers. Due to increased reliability and robustness, new opportunities for robot deployment in the field can be explored. One such field is alpine skiing. For this project, we are looking to develop a simulation environment that can replicate enough dynamics of skiing that a robust RL policy and robot design can be produced out of it. The student is expected to choose the best simulation that combines a low sim2real gap for skiing and high sampling speed for RL algorithms (such as MujocoGym, IsaacGym). This environment will be used to design novel new skiing robots and their controllers.
Requirements —ML, python, robot simulation, URDFs, GIT, Docker
Contact — Valentin Yuryev([email protected]) Arnaud Klipfel([email protected])
To apply, please include a short motivation for this project, as well as a copy of your CV and transcripts.
Reference —
https://www.mdpi.com/1424-8220/19/17/3664
https://ieeexplore.ieee.org/abstract/document/9539926
(Master thesis/Semester project) Task Prompted RL Environment Generation

Figure 1. Example of desired RL environment generation
Description — Machine Learning, and specifically Reinforcement Learning, has shown to enable robots to be able to do robust and reliable control in complex environments. However, to train such action policies, the developer requires to carefully craft a scene for a specific task. We would like to explore multi modal LLMs to be able to generate an infinite number of tasks-based environments which would speed up our training and evaluation for different robot designs.
Requirements —ML, python, robot simulation, URDFs, GIT, Docker
Contact — Valentin Yuryev, [email protected]
To apply, please include a short motivation for this project, as well as a copy of your CV and transcripts.
(Master thesis/Semester project) Soft robotic vocal tract model for speech
Description — The tongue is crucial for articulation in speech. It moves in various ways—up, down, forward, backward, can curl, make contact with different parts of the mouth (like the alveolar ridge, hard palate, teeth), and its shape changes to modulate airflow, creating different phonemes. Our goal is to design a soft robotic tongue for speech that involves replicating the human tongue’s flexibility, precision, and adaptability to produce articulate sounds.
30% Tongue design and fabrication, 40% Actuators and sensors integration, and 30% Software and data analysis.
Requirements — 3D CAD experience (fusion, SolidWorks), fabrication skills for soft robotics, electronics skills (motor & pump control), programming skills (python, MATLAB)
Contact — Benhui Dai ([email protected])
To apply, please include a short motivation for this project, as well as a copy of your CV and transcripts.
(Master thesis/Semester project) Soft robotics for swallowing
Description — Soft robots are made from highly flexible materials that mimic the properties of living organisms, which allows them to adapt to complex environments and friendly interactions. In this project, our goal is to design and prototype a robotic oral system that mimics the motions and environmental conditions of human ingestion. By reviewing existing artificial tongue and muscles designs and integrating advancements in soft robotics, the research will create a minimalistic model suitable for replicating the mechanical ingestive motions to mimic human physiology and eating safety.
30% prototype design and actuation, 50% system integration and control, 20% tests.
Requirements — 3D CAD experience (fusion, SolidWorks), fabrication skills for soft robotics, electronics skills (motor & pump control), programming skills (python, MATLAB)
Contact — Benhui Dai ([email protected])
To apply, please include a short motivation for this project, as well as a copy of your CV and transcripts.
(Master Thesis) Open Parametric Hand design and applications

Description — Robotic manipulation has seen great strides in actuation, sensing, and control. However, outside of biomimetic hands there has been little focus on developing the underlying mechanics and physical behaviours of the hand which play a critical role in manipulation performance, particularly for efficient control and exploitation without a human brain or muscle performance. The goal of the OPH (https://github.com/kg398/100_fingers) project is to explore the link between robot hand morphology and manipulation performance, something that can only be accurately captured in the real world. This is where an accessible, highly customisable, and rapidly manufacturable hand is essential.
The focus of this project is improving the design and usability of the OPH for a variety of real-world applications, such as: fruit harvesting, surgical helping hand/sterilisation, and prosthetics. The project will be approximately 50% practical design and implementing integrated robotics systems, and 50% research running field tests, gathering and presenting results.
Requirements — strong practical robotics skills (CAD, rapid prototyping, programming), interest in dexterous robotic manipulation and solving real-world problems
Contact — Kieran Gilday, [email protected]
To apply, please include a short motivation for this project, as well as a copy of your CV and transcripts.
(Master Thesis/Semester) Design of an in-pipe robot for navigation and intervention in underground cable ducts
Description — As the network of underground cables continues to grow, so do the difficulties associated with maintenance. Often cable ducts contain multiple sizes and types of power/communication lines (copper cables can regularly be >10cm in diameter), leading to challenges if a specific cable has to be replaced and damage to others needs to be avoided.
This project will focus on continuing the development of an existing platform which can successfully navigate these environments, where duct size often varies and can be occupied with cables up to 50% (cross section). The platform should be able to operate in these various conditions, undergoing some mechanical deformation or transformation to achieve this (i.e. morph in some way). This will be a very hands-on project and be heavily design focused, with the option to focus on either extending and improving the mechanical design or the electronics and back-end aspects of the system.
This project involves 10% Literature Search, 50% Design and prototyping, 40% Experimentation (rough percentages)
Requirements — 3D CAD Experience, strong mechanical/mechatronic background, solid electronics knowledge and are interested in novel mechanism design. Programming skills are also beneficial but not a hard requirement.
Contact — Kyle Walker ([email protected])
To apply please include a copy of your CV and transcript along with any other relevant information.
(Master Thesis) Autonomous manipulation and cutting for semi-autonomous extraction of underground cabling
Description — As the network of underground cables continues to grow, so do the difficulties associated with maintenance. Often cable ducts contain multiple sizes and types of power/communication lines (copper cables can regularly be >10cm in diameter), leading to challenges if a specific cable has to be replaced and damage to others needs to be avoided.
This project will focus on continuing the development of a method to cut these cables that is both lightweight and compact, with a focus on integration to a small-scale robot. Similarly, efforts to automate the cable manipulation, grasping and finally cutting process will be key parts of the work..
This project involves 10% Literature Search, 50% Design and prototyping, 40% Experimentation (rough percentages)
Requirements — 3D CAD Experience, strong mechanical/mechatronic background, solid electronics knowledge and programming skills. Experience in manipulation of objects is a plus.
Contact — Kyle Walker ([email protected])
To apply please include a copy of your CV and transcript along with any other relevant information.
(Master Thesis) Bio-hybrid robot design with collected nature part from food-waste

Description — We are exploring a new design paradigm—foraging robotics—that repurposes biological remains, particularly joints from food waste (e.g., shellfish), as high-performance mechanical components in robots. These bio-joints offer lightweight, low-friction, and mechanically efficient structures that are difficult to replicate synthetically. This project involves collecting and processing bio-joints, characterizing their mechanical properties, and integrating them into modular robotic systems. Candidates should be motivated to work at the intersection of biology and robotics, with an interest in hands-on prototyping, mechanical modeling, and bio-inspired design.
Requirements — Keen interest in working with bio-joints and food-waste-based materials, Willingness to conduct hands-on experiments with non-conventional setups, Creative and open mindset to biology/ bio-inspired design. CAD experience is required.
Contact — If you’re interested, please contact Sareum([email protected]) and include a short motivation statement for this project, along with your CV and transcripts.
(Master Thesis) Modularization of an Eversion Flexible Track Robot for Constrained Space(In-pipe) Navigation

(Due to patent restrictions, the actual robot design and video are available upon request.)
Description — Navigation in unstructured terrain is challenging for robot locomotion, especially in constrained environments such as inside pipes. Flexible track robots provide a scalable, rapid-prototyping platform with adaptable navigation capabilities for such terrains. Using the eversion method, these robots roll rather than slide against their environment, which exploits the constrained space effectively. By leveraging 3D printing, the size and mechanical properties of the track can be easily customized for target pipe diameters. Currently, the robot can navigate pipes with diameters between 5 cm and 10 cm by changing the track. For each diameter, the robot can adapt to slight variations using a compressible track for passive adaptation.
The goal of this project is to perform experiments at diverse scales and modularize the driving track design to enable LEGO-like assembly based on specific needs. The project workload is approximately 50% design and prototyping, 50% testing and analysis.
Requirements — Keen interest in hands-on experiments and design. Enjoy working with robots. CAD experience is required. Basic skills in rapid prototyping (laser cutting, 3D printing) are necessary. Kinematics modeling skills or coding ability (Python/Matlab) are a plus.
Contact — If you’re interested, please contact Sareum([email protected]) and include a short motivation statement for this project, along with your CV and transcripts.
(Master Thesis) Vision and Proprioceptive Sensing of an Eversion Flexible Track Robot for Autonomous In-Pipe Navigation
Navigation in unstructured terrain is challenging for robotic locomotion, especially in highly constrained environments such as inside pipes. Flexible track robots offer a scalable, rapid-prototyping platform with adaptable navigation capabilities suited to such conditions. Using an eversion locomotion method, these robots roll rather than slide against their surroundings, enabling efficient and stable movement in tight spaces.
With 3D printing, the robot’s track size and mechanical properties can be easily customized to match different pipe diameters. We currently have working prototypes for three diameters—5 cm, 7.5 cm, and 10 cm—and have implemented basic vision-based sensing for autonomous steering and branching-point detection. However, achieving full autonomy is critical for robust, long-distance navigation and improved practical deployment.
- Improve the vision-based controller for autonomous navigation and mapping.
- Integrate an IMU to enable proprioceptive sensing for estimating robot pose and reducing navigation failures.
The final prototype aims to achieve fully autonomous navigation over 20 meters inside a 10-cm-diameter pipe.
Applicants should have programming skills in Python and be comfortable using Git for version control. Previous experience in machine learning, particularly in areas related to mapping and computer vision, is highly preferred. While hardware experience is not required, candidates should be open to handling very simple motor or microcontroller setups when needed.
Contact — If you’re interested, please contact Sareum([email protected]) and include a short motivation statement(1-sentence) for this project, along with your CV and transcripts.
Reference: S Kim, D Filimonov, and J Hughes, FLEXIV: Adaptive Locomotion via Morphological Changes in a Flexible Track Vehicle, Robotics and Automation Magazine, 2025.
(Master Thesis) Collective Living Matter made from Soft Robotic Cells
Description —Modular robots and robotic collectives offer scalability, adaptability, and the potential for emergent intelligence. Inspired by natural swarms and multicellular systems, many collectives have shown how simple units can work together to create complex behavior. Yet most existing systems still rely on rigid hardware and lack the flexible, cell-like mechanisms needed for truly fluid and reconfigurable motion.
Our Soft Cell Robot project aims to address this gap by creating a robotic system modeled on real cellular behavior. Each soft unit can form and break connections, allowing the group to move, reorganize, and adapt like living matter. By mimicking cellular dynamics, we aim to explore how these systems can self organize, change shape, and respond to their environment. We currently have an initial working prototype with flexible hardware combined with cell attachment-detachment mechanism.
The goal of this project is to recreate essential cellular mechanisms in a physical robot and move toward the idea of smart matter, where collections of simple units behave as an adaptive and intelligent material.
Requirements — Hands-on experience on robot prototype. CAD experience is required.
Contact — If you’re interested, please contact Sareum([email protected]) and include a short motivation statement(1-sentence) for this project, along with your CV and transcripts.
[Closed] (Master Thesis/Semester project) Integrated Design of the Glenohumeral and Scapulothoracic Joints
Description — The human shoulder is composed of multiple bones, including the humerus, scapula, and clavicle, and consists of various joints such as the glenohumeral joint, scapulothoracic joint, and acromioclavicular joint. These anatomical components collectively enable the complex and versatile movements of the shoulder. Inspired by this structure, we have developed glenuhumeral joint and scapulothoracic joint respectively. The objective of this research is to design and develop a robotic shoulder joint by combining glenuhumeral joint and scapulothoracic joint respectively.
This project involve:
- literature study (10%)
- design·fabrication (40%)
- control (20%)
- conducting experiments (30%)
Requirements
- Strong background in CAD
- Programming skills (e.g. Python or Matlab)
Contact — Sudong Lee, [email protected] (To apply, please include a copy of your CV and transcripts.)
(Master Thesis/Semester project) Control of Shoulder Joints and Motion Mapping
Description — We have developed a cable-driven glenohumeral and scapulothoracic joints. Currently, these joints are capable of open-loop position control based on an analytic model or a data-driven controller. In this project, we aim to embed sensors such as IMUs into the joints and complete a closed-loop system to enhance position control accuracy. Additionally, the aim also includes achieving joint motion that closely mimics the movement of the human shoulder.
This project comprises:
- design modification (5%)
- control (45%)
- motion data analysis (30%)
- conducting experiments (20%)
Requirements
- Programming skills (e.g., C++, Python or Matlab)
- A basic-level understanding of robot kinematics, dynamics, and control
Contact — Sudong Lee, [email protected] (To apply, please include a copy of your CV and transcripts.)
[Closed] (Master Thesis/Semester project) Development of an Adhesive Robotic Hand Utilizing Electrostatic
Description — There have been studies that utilize electrostatic principles to generate adhesion forces for gripping applications. This mechanism is particularly promising for delicate and adaptable grasping. The aim of this research is to apply such an electrostatic adhesion mechanism to a robotic hand, enabling effective and controllable object manipulation. The objective is to develop a high-voltage (low-power) generation circuit and an electrode design for electrostatic adhesion hand.
This project comprises:
- circuit and electrode design (50%)
- system design for the hand (30%)
- experimental validation (20%)
Requirements
- Strong background in electronics (PCB development is a plus)
- Fabrication·design skill
Contact — Sudong Lee, [email protected] (To apply, please include a copy of your CV and transcripts.)
[Closed] (Master Thesis/Semester project) Force-sensing Object and Wearable Sensing Device
Description — Understanding the forces applied to objects during human manipulation tasks is important. To enable robots, such as robotic hands and prosthetics, to emulate human-like movements and task strategies, it is essential to comprehend not only human kinematics but also the force information. Accordingly, this project seeks to first develop a force-sensing object and, based on this mechanism, design wearable device capable of force sensing. The use of Hall-effect sensing is currently under consideration for this purpose.
This project comprises:
- literature study (10%)
- design·fabrication (50%)
- conducting experiments (40%)
Requirements
- CAD
- Programming skills (e.g. Python and C++ for Arduino)
Contact — Sudong Lee, [email protected] (To apply, please include a copy of your CV and transcripts.)
Piano Playing Robot with an Anthropomorphic Robotic Hand (Master Thesis)

Piano playing is a high-dexterity activity that requires years of human practice. It has become a benchmark for evaluating the robot’s dexterity and coordination capabilities. Although multi-fingered robotic hands are promising for dexterous manipulation, the cooperation and coordination mechanism of the fingers remain underexploited. Piano performance demands the coordinated actions of all five fingers but achieving such coordinated behavior with a robotic hand that contains >20 degrees of freedom remain a major challenge. Generating feasible and efficient finger trajectories that track the reference score with minimal time and energy expenditure is therefore essential for achieving robust sensorimotor coordination in robotic piano playing.
This project aims to develop an optimal control framework for robotic piano playing by investigating the planning and control on a robot hand. Building upon a complete hardware infrastructure that includes a multi-fingered robotic hand, a UR5 manipulator, and an electronic piano, the student will implement, test, and compare various control strategies. The primary objective is to explore how different path planning algorithms can be adapted for efficient articulation, dynamic response, and coordinated hand-arm performance during piano playing. The outcomes will deepen the understanding of optimal fingering strategies and advance the manipulation capabilities of dexterous robotic hands.
Workload: 10% – literature review, 20% – hardware fabrication and prototyping, 40% – robot control and implementation, 30% – data processing and analysis
l Your Profile:
- Strong interest in robotic manipulation, robot control.
- CAD design and fabrication skills (3D printing, SolidWorks, Fusion360 et al)
- MATLAB and python programming experience
- Knowledge of control systems (PID control), knowledge of other controllers (e.g., MPC or machine learning) is a plus.
l We Offer:
1) A unique opportunity to work at the forefront of dexterous robotic manipulation.
2) Access to state-of-the-art robotic platforms, including multi-fingered robotic hands, a UR5 arm, an electronic piano, and a fully equipped robotics laboratory.
3) The potential to contribute to a high-impact research publication
l Contact:
Dr. Huijiang Wang, [email protected]
Lorenzo Vignoli, [email protected]
To apply, please directly send emails which include a short motivation for this project, as well as a copy of your CV and transcripts to both [email protected] and [email protected].
Master’s Thesis/Semester Projects Proposals (Fall 2025)
We have updated the thesis/semester project offers. Please e-mail the listed contacts directly.
Please tell us your motivation to the specific project, your skillsets and past experiences + something that shows that (CV, website, photos, videos, github, etc), and your transcript.
Students from all research backgrounds are welcome – for example, mechanical engineering, bioengineering, computer science, materials etc.
You can also find this webpage here in another format
Updated August 2025
[closed] Self-healing material as robotic joints
This project focuses on the development of a reconfigurable, soft robotic joint using self-healing materials. The goal is to move beyond conventional applications of these materials in soft robotics (such as grippers) to create a dynamic joint that can be repeatedly “broken” and “re-formed” in new configurations. The primary challenge involves identifying or fabricating a material that possesses robust and repeatable self-healing properties. The project will involve designing a joint that can be controllably “healed” using an external stimulus, like heat, and then deploying this mechanism onto a fabricated prototype.
The project will start with material selection and small-scale testing to verify repeatable healing cycles. The final prototype will demonstrate the joint’s ability to be reconfigured multiple times, with its mechanical properties characterized after each healing event. This research aims create robots which are more versatile and resilient to the environment that they operate in.
10% material identification, 60% prototyping, 30% testing.
Requirements – strong background in CAD (fusion 360, solidworks, openSCAD), electronics, independent experience in mechanical design and fabrication, and interest in bioinspired robots. Self-driven.
Contact – Nana Obayashi, [email protected]
To apply, please include a short motivation for this project, as well as a copy of your CV and transcripts.
[closed] Bio-inspired underwater loco-manipulation
Bio-inspiration is crucial for designing underwater robots that operate in complex natural environments and interact with marine life. Traditional Autonomous Underwater Vehicles (AUVs) often create noise and wake that disturb ecosystems. This has led to the development of robots inspired by various marine creatures like fish, octopuses, and jellyfish, primarily for monitoring and locomotion. However, to significantly increase their utility, these robots need manipulation capabilities to interact with their surroundings and anchor themselves. The goal of this project is to add manipulation features to a lightweight, scalable, and soft robotic fish that uses a single motor for tail propulsion. This involves the design, prototyping, and experimental validation of both the manipulation mechanism and the entire integrated system.
70% prototyping, 30% testing.
Requirements – strong background in CAD (fusion 360, solidworks, openSCAD), electronics, independent experience in mechanical design and fabrication, and interest in bioinspired robots. Self-driven.
Contact – Nana Obayashi, [email protected]
To apply, please include a short motivation for this project, as well as a copy of your CV and transcripts.
(Semester Project) Enhanced Robot Navigation Through Multi-Sensor Integration
Description – Service robots operating in dynamic environments face critical challenges when encountering large obstacles, moving objects, and complex spatial configurations that standard sensors cannot adequately detect. This project focuses on augmenting a Keenon service robot with advanced sensor arrays to create a robust, adaptive navigation system that ensures safe and efficient operation in human-occupied spaces. The enhanced system will integrate multiple sensing modalities including LiDAR, depth cameras, and ultrasonic sensors to build a comprehensive environmental perception framework. Students will develop real-time obstacle detection algorithms, dynamic path planning systems, and sensor fusion techniques that allow the robot to adapt its navigation strategy based on changing environmental conditions. The goal is to significantly improve the robot’s ability to detect and respond to both static and dynamic obstacles while maintaining smooth, efficient movement patterns.This project involves literature review and system analysis (20%), sensor integration and algorithm development (40%), and experimental validation and performance testing (40%).
Requirements – The project will teach you skills in Python, Computer Vision, System Integration and APIs.
Contact – Max Polzin, [email protected]
To apply, please include your CV and academic transcripts.
(Master Thesis) Force estimation and control of a spring loaded robotic arm
Description — The ability to estimate and control the force is critical for robotic arms with applications where environmental interaction is critical. While most conventional robotic arms achieve this via torque estimation at the joint level via torque sensors directly attached to the joints, we developed a tendon driven 7-dof robotic arm where physical springs are embedded which provides an inherent safety level to the robot system.
In this project, we work towards force estimation and control of this novel robotic arm, by taking into account the full robot model (down to the details of tendon mechanism and actuator models/control strategies). The goal is to deploy the models and controllers on a real robot to perform contact rich interaction tasks.
This project is a collaboration with Embodied AI, the spinoff from CREATE Lab.
Requirements — Strong control background, programming experience (python), real robot experience (actuation, sensing, control, etc)
Contact — Kai Junge, k[email protected]
To apply, please include a short motivation for this project, as well as a copy of your CV and transcripts.
(Master Thesis) Robotic vacuum cleaning using a continuum robot arm
Description — Assistive in-house care is one of the grand application areas for robotics. This application poses a unique challenge where the environment remains largely unstructured, leading to specialized automation tools to be ineffective while highly generalized solutions are decades behind.
Consider the task of vacuum cleaning. Although mobile vacuum robots have become prevalent in households, they struggle in corners and are only limited to the floor.
In this project, we explore the task of combining continuum soft robots (https://www.nature.com/articles/s44182-023-00004-7) with a vacuum cleaner hose. By actuating a hose with a soft arm, surfaces in 3D can be cleaned by leveraging the manipulability of the soft arm and the ability to make safe interactions with the environment.
The work packages include robotic prototyping of this system, feasibility testing and analysis, and experimentation of different controllers. This project is a collaboration with Embodied AI, the spinoff from CREATE Lab.
Requirements — practical robotic skills (3D printing, CAD), programming experience (python), motivated for field testing, strong communication skills
Contact — Kai Junge, k[email protected]
To apply, please include a short motivation for this project, as well as a copy of your CV and transcripts.
(Master Thesis) Open Parametric Hand design for manufacturing and accessibility
Description — Robotic manipulation has seen great strides in actuation, sensing, and control. However, outside of biomimetic hands there has been little focus on developing the underlying mechanics and physical behaviours of the hand which play a critical role in manipulation performance, particularly for efficient control and exploitation without a human brain or muscle performance. The goal of the OPH (https://github.com/kg398/100_fingers) project is to explore the link between robot hand morphology and manipulation performance, something that can only be accurately captured in the real world. This is where an accessible, highly customisable, and rapidly manufacturable hand is essential.
The OPH has seen success so far, but particularly the actuation system is in need of upgrading for accessibility and potentially for scaling up manufacturing. The focus of this project is redeveloping the OPH and surrounding systems for performing large-scale experiments, and if the project goes well, performing some of those large-scale experiments and translating the work for reproduction. 70% design and prototyping, 20% testing, 10% outreach.
Requirements — strong background in CAD (fusion 360/solidworks, openSCAD (bonus)), interest in dexterous robotic manipulation and mechanical design
Contact — Kieran Gilday, [email protected]
To apply, please include a short motivation for this project, as well as a copy of your CV and transcripts.
(Master Thesis) Open Parametric Hand field testing and actuation development
Description — Robotic manipulation is poised to take over the next generation of automation tasks requiring manipulations more complex than pick and place and robustness to significant environmental uncertainties. The OPH (https://github.com/kg398/100_fingers) is one potentially capable manipulation platform which focuses on high degree of customizability to tailor dexterous behaviours to a given application rather than making one general purpose hand not optimised to any single task.
This project focuses on finding and solving real world manipulation problems such as robotic harvesting, industrial food handling, or flexible warehouse/factory tasks. This involves collaborations with industry and academic partners, bespoke system development and problem solving, field tests, and liaising with end users. One major work package will be developing customization packages for the actuation system, where prediction and optimisation of tendon actuation strategies is an unsolved problem. 30% robotic system development, 30% actuation/modeling, 40% case studies/outreach.
Requirements — practical robotic skills (3D printing, CAD), programming experience (python, matlab), motivated for field testing, strong communication skills
Contact — Kieran Gilday, [email protected]
To apply, please include a short motivation for this project, as well as a copy of your CV and transcripts.
(Master Thesis) Open Parametric Hand design optimization
Description — Robotic manipulation has seen great strides in actuation, sensing, and control. However, outside of biomimetic hands there has been little focus on developing the underlying mechanics and physical behaviours of the hand which play a critical role in manipulation performance, particularly for efficient control and exploitation without a human brain or muscle performance. The goal of the OPH (https://github.com/kg398/100_fingers) project is to explore the link between robot hand morphology and manipulation performance, something that can only be accurately captured in the real world.
With up to 150 parameters to optimise, there is a huge possible design space of our robotic hand. The investigations we have performed so far only look at small parcels of this, but already have revealed very interesting results on finger design such as optimising for behavioural ranges converges on human-like design. The project has three major parts, the first is refining our models or developing new ones for extracting virtual hand performance metrics. The second is investigating potential optimization methods, especially towards diversity-based optimization. The final is investigating optimizations for real world problems. 30% virtual hand modeling, 30% optimization methods, 40% case studies and robotic hand development.
Requirements — strong programming background (python, matlab), knowledge of optimization algorithms is a plus, practical robotic experience is a plus
Contact — Kieran Gilday, [email protected]
To apply, please include a short motivation for this project, as well as a copy of your CV and transcripts.
(Master Thesis) Open Parametric Hand large-scale tactile sensing (EIT)
Description — Large-scale tactile sensing plays a huge role in dexterous human and robotic manipulation, providing feedback for adapting to real world unknowns but also an essential mechanism for how we experience and learn from the world around us. Compared to the 17,000 mechanoreceptors in human hands, robotic hands rarely contain more than 100. Electro-impedance tomography is a potential solution to scale up tactile sensing capabilities using medical imaging techniques to generate impedance maps of a conductive skin sensitive to tactile forces.
This project will be about developing the EIT technology for small form factors, pcb development, testing, interpreting and leveraging tactile images to solve manipulation problems. Using our existing OPH (https://github.com/kg398/100_fingers) as a basis, we can explore the efficacy of EIT for gaining tactile information, with final deliverables in demonstrations exploiting tactile information to improve manipulation performance and/or using the information to improve learning systems. 30% electronics development, 30% robotic system integration, 40% data processing and control system development.
Requirements — electronics experience (pcb development ideal), knowledge of microcontrollers, solid programming skills (python, matlab), knowledge of control systems, vision systems, and machine learning is a plus
Contact — Kieran Gilday, [email protected]
To apply, please include a short motivation for this project, as well as a copy of your CV and transcripts.
(Master Thesis) Open Parametric Hand small-scale tactile sensing and force feedback (haptics)
Description — Tactile sensing and force feedback to users is a strong requirement in many robotic hand applications, enabling improved performance and robustness to uncertainties. In particular for prosthetic applications haptic feedback can greatly improve user experience. The OPH (https://github.com/kg398/100_fingers) offers a strong foundation for accessible and functional prosthetic hands, however, integration of tactile sensing and force feedback is an unsolved problem.
This project is about developing simple but robust force feedback systems for prosthetic hand users. There is scope for exploration of different sensing and haptic technologies from purely electrical (e.g. with custom developed soft piezoresistive skins and vibration motor haptic patches), purely mechanical (e.g. transmitting tactile pressure via fluid channels to inflatable skin patches), or a mixture. Rapid prototyping, experiment design, and user testing will be significant parts of the project. 60% haptic system development, 30% experimentation and user testing, 10% robotic hand development.
Requirements — electronics and mechanical prototyping skills (mcu, pcb, cad, 3d printing are a plus), interest in robotic/prosthetic hands or the science of human-robot interactions
Contact — Kieran Gilday, [email protected]
To apply, please include a short motivation for this project, as well as a copy of your CV and transcripts.
(Master Thesis) Open Parametric Hand learning and control with foundation models
Description — The emergence of foundation models has deep implications for dexterous robotic manipulation. In particular, exploitation of diverse hand-environment interactions can provide a step up in more naturalistic and autonomous manipulation performance. Our technology, the OPH (https://github.com/kg398/100_fingers), is an ideal platform to apply recent high performing tools such as diffusion models and visual language action models, where current control methods are unable to efficiently learn for diverse tasks with sequential interactions.
This project is about researching and applying advances in foundational models for robotic manipulation to our unique platform to achieve generalisable and adaptive performance. This involves developing systems for multimodal data capture, training models, and experiment design. 50% data systems, capture and experiment design, 40% model training and exploration, 10% robotic hand development.
Requirements — strong programming experience (e.g. python, matlab), machine learning experience, knowledge of ml-based manipulation controllers is a plus (e.g. reinforcement learning, imitation learning, diffusion models, vlas), practical robot development skills is a plus
Contact — Kieran Gilday, [email protected]
To apply, please include a short motivation for this project, as well as a copy of your CV and transcripts.
(Master Thesis / Semester Project) Stretchable Optical Fiber Sensor for Sensing Glove
Description – The stretchable optical fiber sensor is a thin optical fiber capable of distributed sensing of bending and stretching. This sensor uses light as a signal and colored coating as a spectral filter, making it possible to multiplex the signals. As a result, it is possible to measure not only the stimuli but also the location of the stimuli. It offers several advantages such as speed and compactness, addressing the challenging problem of distributed sensing of multimodal stimuli in the field of robotics. The goal of this project is to optimize the design of this sensor and embed it into a glove in order to measure finger joint angles for wearable sensing applications.
This project involves a literature survey (20%), fabrication of sensors and the sensing glove (40%), and conducting experiments (40%).
Requirements – The project requires fabrication skills, 3D CAD experience, and basic data analysis skills.
Contact – Haewon Jeong, [email protected]
To apply, please include your CV and academic transcripts.
[CLOSED] (Master Thesis/Semester) Identification of cable duct geometric parameters in cluttered and constrained environments
Description — As the network of underground cables continues to grow, so do the difficulties associated with maintenance. Often cable ducts contain multiple sizes and types of power/communication lines (copper cables can regularly be >10cm in diameter), leading to challenges if a specific cable has to be replaced and damage to others needs to be avoided. One issue is being able to identify a cable of interest within a bundle, or identifying upcoming geometry changes in the duct itself.
This project will be focused on these types of tasks, using either vision or other sensing modalities to identify which cable should be manipulated or cut, for the back-end control to function accordingly. Similarly, obtaining basic information about the environment (like identifying cracks or changes in pipe diameter) are also key points of interest.
This project involves 10% Literature study, 50% Software/Firmware Implementation, 40% Experimentation and Evaluation (rough percentages)
Requirements — strong programming skills (Python/C++/MATLAB), experience with computer vision/other sensing modalities and electronics skills.
Contact — Kyle Walker ([email protected])
To apply please include a copy of your CV and transcript along with any other relevant information.
[CLOSED] (Master Thesis) Design of an in-pipe robot for navigation and intervention in underground cable ducts
Description — As the network of underground cables continues to grow, so do the difficulties associated with maintenance. Often cable ducts contain multiple sizes and types of power/communication lines (copper cables can regularly be >10cm in diameter), leading to challenges if a specific cable has to be replaced and damage to others needs to be avoided.
This project will focus on the mechanical development of a robotic platform which can successfully navigate these environments, where duct size often varies and can be occupied with cables up to 50% (cross section). The platform should be able to operate in these various conditions, undergoing some mechanical deformation or transformation to achieve this (i.e. morph in some way). This will be a very hands-on project and be heavily design focused.
This project involves 10% Literature Search, 50% Design and prototyping, 40% Experimentation (rough percentages)
Requirements — 3D CAD Experience, strong mechanical/mechatronic background, solid electronics knowledge and are interested in novel mechanism design. Programming skills are also beneficial but not a hard requirement.
Contact — Kyle Walker ([email protected])
To apply please include a copy of your CV and transcript along with any other relevant information.
(Master Thesis) Autonomous manipulation and cutting for semi-autonomous extraction of underground cabling
Description — As the network of underground cables continues to grow, so do the difficulties associated with maintenance. Often cable ducts contain multiple sizes and types of power/communication lines (copper cables can regularly be >10cm in diameter), leading to challenges if a specific cable has to be replaced and damage to others needs to be avoided.
This project will focus on continuing the development of a method to cut these cables that is both lightweight and compact, with a focus on integration to a small-scale robot. Similarly, efforts to automate the cable manipulation, grasping and finally cutting process will be key parts of the work..
This project involves 10% Literature Search, 50% Design and prototyping, 40% Experimentation (rough percentages)
Requirements — 3D CAD Experience, strong mechanical/mechatronic background, solid electronics knowledge and programming skills. Experience in manipulation of objects is a plus.
Contact — Kyle Walker ([email protected])
To apply please include a copy of your CV and transcript along with any other relevant information.
[CLOSED] (Master Thesis/Semester) Data-Enabled Model Predictive Control for Compliant Manipulators
Description — Dynamic control of compliant manipulators is still an open challenge, with many of the current issues arising from the high degree of nonlinearities in system dynamics. Whilst the use of Model Predictive Control (MPC) has been increasing in conjunction with computing capabilities, the uptake in the space of compliant manipulators has been constrained by the inability to efficiently and effectively solve the optimisation problem online using methods suitable for real-world deployment, coupled with the uncertainty attached to estimating the dynamic parameters in the system model.
This project will investigate these factors and aim to develop a data-driven, reliable and robust MPC framework for compliant manipulators, from parameter identification through to real-world implementation. The overarching aim is to be able to modify the system dynamics online when accounting for factors such as operating environment (water/air) and manipulator stiffness changes.
This project involves 20% Literature Search, 40% Simulation, 40% Experimentation (rough percentages)
Requirements — strong programming skills (MATLAB/Python/C++), knowledge of nonlinear system dynamics, experience with model predictive control (more widely model-based control) and optimisation-based control strategies/nonlinear solvers in general. Prior experience and confidence working with real experimental platforms is a bonus but not a must.
Contact — Kyle Walker ([email protected])
To apply please include a copy of your CV and transcript along with any other relevant information.
[CLOSED] (Master Thesis) 3D Variable Stiffness Manipulator Design
Description — In nature, when organisms change environments or perform different tasks they often have the ability to control their internal parameters (for example joint/body stiffness) to operate effectively. This project will explore how this phenomena can be implemented in a robotic system to design a manipulator which can either be extremely flexible or extremely rigid (and varied in-between) depending on the task at hand or the environment it is operating in.
Specifically, the project will focus on the 3D case and include implementation of a control methodology for identifying when a stiffness change is required, subsequently applying the control signal to instigate this. The target scenario for this is transitioning from air to water, where a stiffness change can improve the controllability and efficiency of the system.
This project involves 10% Literature Search, 40% Mechanical Design and prototyping, 20% Control and electronics implementation, 30% real-world experimentation (rough percentages)
Requirements — 3D CAD Experience, strong background in mechanism design, are confident working with electronics and have solid programming skills. Experience with control algorithms (particularly for compliant/nonlinear systems) is a bonus but not a must.
Contact — Kyle Walker ([email protected])
To apply please include a copy of your CV and transcript along with any other relevant information.
[CLOSED] (Summer project) Wearable devices to enhance sensations for robotic hands
Description — Wearable devices and smart gloves are revolutionizing human-machine interaction and robotic control. This project aims to develop wearable devices to enhance the sensing capability of robotic hands. Our goal is to gain in-depth understanding of human behaviour and human-machine-environment interfaces. The focus will be on innovative sensor integration (force, bending, temperature, proprioception, etc.), comfortable ergonomic design (wearables like gloves for both human and robot), and real-time data transmission and interaction with robotic hands. 20% Sensor/actuator design and fabrication, 30% Wearable device integration and development, and 50% Software and data analysis.
Requirements — programming skills (python, MATLAB), knowledge of control systems, computer vision systems, and machine learning.
Contact — Benhui Dai ([email protected])
To apply, please include a short motivation for this project, as well as a copy of your CV and transcripts.
(Summer project/Master thesis/Semester project) Tactile e-skin sensing with EIT
Description — Tactile sensing plays an esstential role in dexterous human and robotic manipulation, providing feedback for adapting to the real world. Electrical Impedance Tomography (EIT) is an imaging technique that measures the conductivity, permittivity, and impedance of an object. It works by attaching electrodes to the surface of the object and then using the electrodes to either inject current or measure the resulting voltages. Interpolating the raw signals then results in an image of the object’s internal conductivity.
This project will be about developing the EIT technology for e-skin, pcb development, testing, interpreting and leveraging tactile images to solve manipulation problems. 20% electronics development, 30% robotic system integration, 50% data processing and control system development.
Requirements — electronics experience (pcb development ideal), knowledge of microcontrollers, solid programming skills (python, matlab), knowledge of control systems, and machine learning is a plus
Contact — Benhui Dai, [email protected]
To apply, please include a short motivation for this project, as well as a copy of your CV and transcripts.
(Master thesis/Semester project) Soft robotic tongue for speech
Description — The tongue is crucial for articulation in speech. It moves in various ways—up, down, forward, backward, can curl, make contact with different parts of the mouth (like the alveolar ridge, hard palate, teeth), and its shape changes to modulate airflow, creating different phonemes. Our goal is to design a soft robotic tongue for speech that involves replicating the human tongue’s flexibility, precision, and adaptability to produce articulate sounds. 30% Tongue design and fabrication, 40% Actuators and sensors integration, and 30% Software and data analysis.
Requirements — 3D CAD experience (fusion, SolidWorks), fabrication skills for soft robotics, electronics skills (motor & pump control), programming skills (python, MATLAB)
Contact — Benhui Dai ([email protected])
To apply, please include a short motivation for this project, as well as a copy of your CV and transcripts.
(Summer project/Master thesis/Semester project) Chewing robot with sensory-motor control
Summary: The process of chewing food is achieved through the up-and-down movement of the jaw and the shearing movement of the teeth. We have developed a 6 DOF chewing robotic platform, including the mouth, jaw, and tooth. The goal is to simulate the mechanical movements of humans chewing by robots and monitor this process by force sensors and cameras. What’s more, artificial saliva and a soft robotic tongue will be embedded into the system to provide a biomimetic oral environment for better food-robot interaction.
Workload: 50% control, 30% data processing and analysis, 20% hardware design and fabrication
Requirements — programming skills (python, MATLAB), knowledge of control systems (PID control), and better machine learning.
Contact — Benhui Dai ([email protected])
To apply, please include a short motivation for this project, as well as a copy of your CV and transcripts.
(Master thesis/Semester project) Robotic Stomach Design
Description — Digestive malfunctions are linked to a variety of health conditions, including metabolic disorders, brain lesions, and gastrointestinal diseases. Current research in digestive systems lacks a reliable, controlled method to replicate the physical and mechanical processes of the human stomach. This thesis aims to design and prototype a robotic stomach that mimics the motions and environmental conditions of human digestion. By reviewing existing artificial stomach designs and integrating advancements in soft robotics, the research will create a minimalistic model suitable for replicating the mechanical digestive motions. 30% literature review, 50% prototype design and actuation,20% tests.
Requirements — 3D CAD experience (fusion, SolidWorks), fabrication skills for soft robotics, electronics skills (motor & pump control), programming skills (python, MATLAB)
Contact — Benhui Dai ([email protected]), Arnaud Klipfel ([email protected]).
To apply, please include a short motivation for this project, as well as a copy of your CV and transcripts.
[CLOSED] (Master Thesis/Semester project) Design and Development of a Robotic Upper Limb
Description — The human shoulder is composed of multiple bones, including the humerus, scapula, and clavicle, and consists of various joints such as the glenohumeral joint, scapulothoracic joint, and acromioclavicular joint. These anatomical components collectively enable the complex and versatile movements of the shoulder. Inspired by this structure, the objective of this research is to design and develop a robotic upper limb capable of replicating similar shoulder motions. The system will be constructed using flexible fibers and actuated via a tendon-driven mechanism, with the goal of emulating the biomechanical characteristics of the human shoulder.
This project involves literature study (10%), design•fabrication skills (40%), actuating (30%), and conducting experiments (20%).
Requirements — strong background in CAD, and programming skills (e.g. Python, Matlab)
Contact — Sudong Lee, [email protected]
To apply, please include a copy of your CV and transcripts.
(Master Thesis/Semester project) Development of an Adhesive Robotic Hand Utilizing Electrostatic
Description — There have been studies that utilize electrostatic principles to generate adhesion forces for gripping applications. This mechanism is particularly promising for delicate and adaptable grasping. The aim of this research is to apply such an electrostatic adhesion mechanism to a robotic hand, enabling effective and controllable object manipulation. The objective is to develop a high-voltage (low-power) generation circuit and an electrode design for electrostatic adhesion hand.
This project comprises circuit and electrode design (50%), system design for the hand (30%), and experimental validation (20%).
Requirements — strong background in electronics (PCB development is a plus), and fabrication•design skills
Contact — Sudong Lee, [email protected]
To apply, please include a copy of your CV and transcripts.
Master Thesis Proposal: Humanoid Soft Bimanual Arm Robot with Trimmed Helicoid Structures
Note: This topic is part of a broader initiative to advance human-robot collaboration and soft robotics. It is linked to projects on adaptive control systems, biomimetic materials, and safe human-robot interaction.
Description — Traditional rigid robotic arms, while precise, face limitations in safe interaction with humans and adaptability in dynamic environments. Applications in healthcare, assistive technologies, and collaborative workspaces demand robots that are inherently compliant, lightweight, and capable of delicate, human-like manipulation. This project will focus on designing and prototyping a humanoid soft bimanual arm robot using trimmed helicoid structures, a novel geometric approach enabling lightweight construction, inherent compliance, and dynamic motion. The arms will integrate soft actuators and sensors to safely interact with humans while performing tasks requiring precision and adaptability (e.g., object manipulation, collaborative assembly).
Key objectives:
- Design and Fabrication: Optimize the trimmed helicoid architecture for dual-arm coordination, balancing structural integrity, flexibility, and weight.
- Actuation and Sensing: Develop soft pneumatic/muscle-inspired actuators embedded with stretchable sensors for real-time force and motion feedback.
- Control System: Implement adaptive algorithms for bimanual tasks (e.g., grasping, lifting) and dynamic movements, ensuring safety during human interaction.
- Experimentation: Validate safety, compliance, and performance in scenarios involving human proximity and variable payloads.
Project Breakdown:
– 15% Literature Review: Survey soft robotics, humanoid arm design, and control strategies for bimanual systems.
– 50% Design & Prototyping: CAD modeling of helical structures, actuator integration, and sensor embedding.
– 35% Experimentation: Testing safety (force thresholds, collision response), dynamic motion (speed, precision), and task performance.
Requirements —
– Proficiency in 3D CAD (e.g., Fusion 360, SolidWorks) for complex geometric designs.
– Strong mechatronics/mechanical engineering background (soft actuator experience preferred).
– Knowledge of materials science (flexible composites, elastomers) and electronics (sensor integration, microcontrollers).
– Programming skills (Python/C++ for control systems; ROS/Simulink experience a plus).
– Creativity in problem-solving and interest in human-robot interaction.
Contact — [Your Name] ([Your Email]), [Advisor’s Name] ([Advisor’s Email])
To Apply: Submit a CV, academic transcript, and portfolio (e.g., CAD designs, robotics projects) demonstrating relevant skills.
—
Key Innovations:
– Trimmed Helicoid Geometry: Combines helical and hyperbolic traits for tunable stiffness and compact, lightweight form.
– Dual-Arm Synergy: Enables human-like coordination (e.g., twisting, lifting) while maintaining passive safety.
– Applications: Assistive care, rehabilitation, and industrial co-robotics where human safety is paramount.
Expected Challenges:
– Balancing compliance and precision in soft actuators.
– Synchronizing bimanual movements under sensor feedback delays.
– Scaling fabrication for complex helicoid patterns.
This project aims to bridge the gap between rigid industrial robots and biologically inspired systems, paving the way for safer, more versatile human-robot collaboration.
(Master Thesis) Bio-inspired Soft Snake Robot Mechanical Design and Gait Control
In recent years, a number of robots have been developed by using inspirations from animals due to their advanced and robust locomotion capabilities. One class of such animals are snakes, which are capable of moving in most of the complex environments on earth. The slim body structure of the snakes enables them to travel in narrow, constrained environments. Snake-like robots are thus promising for applications such as pipeline inspection, search and rescue in rubbles, and minimally invasive surgeries. Existing snake robots have predominantly adopted rigid modules. One classic snake robot utilized multiple motors to deform the rigid body, which demonstrated several different locomotion modes in traversing a complex terrain, climbing, and inspecting inside a pipeline. Another multi-section snake robot achieved crawling on land and swimming in water. Despite these progresses, there are some limitations for rigid snake robots. In particular, the size of a rigid snake robot is limited by the motors and complex mechanisms, which increases its difficulty in traversing a narrow environment.
In this project, we aim to design a multi-segment soft snake robot that achieves robust locomotion in contact-rich environments through gait patterns generated by section bending.
Workpackages: 60% mechanical design, 30% sensing integration, 10% gait control
Requirement: 1. Mechanical design experience, 2. Solidworks or Fusion experience, 3. FEM experience (Abaqus or Ansys), Matlab or python programming.
Contact: [email protected] (Guanran Pei)
To Apply: please send email with CV, transcripts.
(Master Thesis/Semester Project) Sensor Development and System Integration for a Slender Endoscopic Surgical Robot
Surgical robots are typically characterized by their slender profile and high degrees of freedom, enabling flexible movement within confined spaces to perform complex surgical and diagnostic tasks. However, due to their compact size, most surgical continuum robots can only accommodate actuation modules internally, lacking integrated proprioceptive sensing. As a result, these robots typically rely on teleoperation for task execution. IMU (Inertial Measurement Unit) sensors, benefiting from their modular design and miniaturization potential, can be leveraged to provide surgical continuum robots with proprioceptive sensing capabilities, thereby enhancing their autonomy.
This project aims to achieve sensor integration in slender surgical robots through the customization and miniaturization of IMU sensors, endowing surgical continuum robots with autonomous perception and decision-making capabilities.
Workpackages: 20% tendon driven slender surgical robot design, 50% IMU sensors miniaturization, 30% sensing system integration
Requirement: 1. Solid PCB design experience (important), 2. KiCAD, eagle or any other PCB EDA experience, 3. Solidworks and Fusion experience.
Contact: [email protected] (Guanran Pei)
To Apply: please send email with CV, transcripts.
(Master Thesis) Lightweight and Compact Leg and Spine Design for a Biomimetic Mouse Robot
Quadrupedal mammals exhibit remarkable locomotion capabilities in unstructured terrains, maintaining energy-efficient stable gaits that are crucial for survival behaviors like prey pursuit or predator evasion. These evolutionary advantages have inspired significant robotics research in quadrupedal systems. Practical applications are already being demonstrated across multiple domains, including industrial inspection, emergency response, security operations, and logistics delivery.
Current quadruped robot designs primarily focus on medium to large-scale platforms. However, in extreme and confined environments, miniaturized quadrupeds demonstrate significant potential due to their superior maneuverability and compact form factor. Yet their small size imposes substantial challenges in system integration and lightweight leg-spine mechanism design.
This project aims to develop a biomimetic mouse-inspired robot with dimensions under 10cm (L×W×H). The research will focus on: compact lightweight leg-spine integrated design and high-density actuation system integration.
Workpackages: 70% leg and spine design, 20% system integration, 10% gait control
Requirement: 1. Mechanical design experience, 2. Solidworks or Fusion experience, 3. FEM experience (Abaqus or Ansys), Matlab or python programming.
Contact: [email protected] (Guanran Pei)
To Apply: please send email with CV, transcripts.
(Master Thesis/Summer Project) Bio-hybrid robot design with collected nature part from food-waste

Description — We are exploring a new design paradigm—foraging robotics—that repurposes biological remains, particularly joints from food waste (e.g., shellfish), as high-performance mechanical components in robots. These bio-joints offer lightweight, low-friction, and mechanically efficient structures that are difficult to replicate synthetically. This project involves collecting and processing bio-joints, characterizing their mechanical properties, and integrating them into modular robotic systems. Candidates should be motivated to work at the intersection of biology and robotics, with an interest in hands-on prototyping, mechanical modeling, and bio-inspired design.
Requirements — Keen interest in working with bio-joints and food-waste-based materials, Willingness to conduct hands-on experiments with non-conventional setups, Creative and open mindset to biology/ bio-inspired design. CAD experience is required.
Contact — If you’re interested, please contact Sareum([email protected]) and include a short motivation statement for this project, along with your CV and transcripts.
(Master Thesis/Summer Project) Modularization of an Eversion Flexible Track Robot for Constrained Space(In-pipe) Navigation

(Due to patent restrictions, the actual robot design and video are available upon request.)
Description — Navigation in unstructured terrain is challenging for robot locomotion, especially in constrained environments such as inside pipes. Flexible track robots provide a scalable, rapid-prototyping platform with adaptable navigation capabilities for such terrains. Using the eversion method, these robots roll rather than slide against their environment, which exploits the constrained space effectively. By leveraging 3D printing, the size and mechanical properties of the track can be easily customized for target pipe diameters. Currently, the robot can navigate pipes with diameters between 5 cm and 10 cm by changing the track. For each diameter, the robot can adapt to slight variations using a compressible track for passive adaptation.
The goal of this project is to perform experiments at diverse scales and modularize the driving track design to enable LEGO-like assembly based on specific needs. The project workload is approximately 50% design and prototyping, 50% testing and analysis.
Requirements — Keen interest in hands-on experiments and design. Enjoy working with robots. CAD experience is required. Basic skills in rapid prototyping (laser cutting, 3D printing) are necessary. Kinematics modeling skills or coding ability (Python/Matlab) are a plus.
Contact — If you’re interested, please contact Sareum([email protected]) and include a short motivation statement for this project, along with your CV and transcripts.
(Master Thesis) Computationally-Designed 3D-Printed Foam Sensors for Smart Helmets
Description — This project explores the development of novel foam-based pressure sensors that can be directly embedded into 3D-printed helmet liners. Building on recent innovations in soft sensorized open-cell foams, the student will contribute to the design, fabrication, and testing of multi-layer, multi-material foam structures capable of sensing impact forces while providing superior mechanical protection.
The work involves computational design of foam geometries—such as body-centered cubic (BCC) and Kelvin structures—optimized for specific mechanical and sensing responses. Students will apply topology optimization methods, explore strategies for co-designing mechanical and electrical properties, and fabricate prototypes using state-of-the-art multi-material 3D printing techniques. The project workload is approximately 50% design and prototyping, 50% testing and analysis.
Requirements — Keen interest in hands-on experiments and design. CAD experience is required. Basic skills in rapid prototyping, especially 3D printing are necessary. Kinematics modeling skills, simulation(FEA) or coding ability (Python/Matlab) are a plus.
Contact — If you’re interested, please contact Sareum([email protected]) and include a short motivation statement for this project, along with your CV and transcripts.
[CLOSED] Real-World Reinforcement Learning gym for alpine robots (semester project/Thesis)
We have a robot that is using built-in compliance in the frame made of fiberglass rods and tendons to adapt its shape to the terrain it locomotes on. Tendons can be used to change the general shape of the robot. Due to its compliance and use of tendons, simulated models are expensive, which hinders the training efficiency and even makes it intractable. In addition, since this robot is meant to evolve on Alpine terrains we want to explore how learning in the real world can directly help learning adapted policies. To this end, like parallel environments in a simulated gym environment, we want to build multiple versions of our robot and deploy RL algorithms on the fleet of robots. You will work closely with a PhD student on building a platform that is easy to replicate, and if time allows deploying distributed RL learning algorithms like DPPO.
Requirements:
- A basic understanding of Arduino, CAD, raspberry would be useful for hardware building
- High motivation
- RL experience (a plus)
- Good python skills
Contacts: Arnaud Klipfel ([email protected])
Morphology estimation of a compliant Alpine robot (semester project)
We have a robot that is using built-in compliance in the frame made of fiberglass rods and tendons to adapt its shape to the terrain it locomotes on. Tendons can be used to change the general shape of the robot. In these different shape configurations the robot has to be controlled using a different policy.
We are looking for a motivated student to help on the hardware building side and on prototyping the recognition of the shape based on the driving dynamics through data driven methods. For this project, a wheeled robot configuration will be used.
Requirements:
- a basic understanding of Arduino, CAD, raspberry would be useful
- High motivation
- Field robotics experience is a plus
- Machine Learning, deep learning experience
Contacts: Arnaud Klipfel ([email protected])
Learning control policies for autonomy in case of hardware failure (semester project)
We have a robot that is using built-in compliance in the frame made of fiberglass rods and tendons to adapt its shape to the terrain it locomotes on. Tendons can be used to change the general shape of the robot. Compliance makes the robot robust, but can also produce changes overtime in the frame dynamics. In addition, in a long field mission, failures on the hardware and software side are expected.
We are looking for a motivated student to work on designing a controller that could handle hardware issues, changes and failures, such as for instance a broken motor or a broken part of the frame, or even operating under low battery, which would cause the dynamics of the platform to change.
Requirements:
- a basic understanding of Arduino, CAD, raspberry would be useful
- High motivation
- Field robotics experience is a plus
Contacts: Arnaud Klipfel ([email protected])
[CLOSED] Design of an alpine climbing robot (semester project)
Similar to a pipe climbing robot, we want to design a robot that can go up steep mountain faces or buildings by leveraging crags or excavations (irregular open pipes). We are looking for a master student with a good experience in design to propose a robotic platform. You will closely work with a PhD student who has experience in control and field robotics. Field robotics experiments are expected at the end of the project.
Requirements:
- a basic understanding of Arduino, raspberry
- CAD design, 3D printing
- High motivation
- Field robotics experience is a plus
Contacts: Arnaud Klipfel ([email protected],main contact), Kyle Walker ([email protected])
Energy production from biomass to extend the autonomy of robotic field operations (Thesis)
A bioreactor/methanisation transforms biomass into energy.This project aims at helping on the automation and optimization of a bioreactor to produce as much energy as possible while minimizing the energy consumption. You will closely work with a Ph.D. student to optimize the energy production of the bioreactor for its embedding on a mobile robot platform, i.e. you will work on developing the first artificial stomach embedded on a mobile robot. The goal is to have a robot that is capable of consuming biomass for long-term operations.
Requirements
- Programming
- Arduino, esp32 experience
- Experience in wet lab or biology skills (a plus but much appreciated)
Contacts: Arnaud Klipfel ([email protected])
Autonomous Robotic Environmental Monitoring in the Alps (Master Thesis)
Climate change is causing faster and more erratic shifts in weather conditions, leading to significant changes in the distribution of insect, bird, and animal species across regions. Using a robot designed to navigate alpine terrain, we aim to develop a system that can collect environmental data and autonomously choose the next location to sample, based on information gain.
Your role will focus on helping with the control of the robotic platform to maximize coverage of a target area. You will also assist with maintenance and monitoring of the robot and its systems.
Requirements
- Control skills for robotics
- Microcontroller experience : Arduino, esp32
- Robotics skills
Contacts: Arnaud Klipfel ([email protected])
Hand Pose Reconstruction from Video for Dexterous Robotic Manipulation (Master Thesis / Semester / Summer Project)

Outline: This project aims to develop a method to capture hand pose from human demonstrationsin video to learn robotic manipulation skills.
Background: Learning a policy from human demonstrations can effectively leverage human knowledge to teach robots complex manipulation tasks. However, collecting tele-operated demonstrations is often limited by the substantial physical and cognitive demands placed on the human expert. As a result, learning from video demonstrations offers a promising alternative.
This project focuses on dexterous manipulation using a multi-fingered robotic hand. The proposed method involves two main steps: (1) capturing the hand trajectories and object interactions from demonstration videos, and (2) mapping the estimated human hand poses to the corresponding robot hand actions, accounting for differences in their action spaces. This approach aims to simplify the data collection process for learning from demonstration.
Work Package: In this project, we will first use a hand pose estimation method to extract the human expert’s hand poses from video. Next, we will construct a mapping that translates human hand actions into robot hand actions. If time and progress permit, we will use the collected demonstrations to train an imitation learning model for a specific manipulation task.
literature review about most recent related work 10%, implementation of open-source project 45%, algorithms development 45%
Requirements — strong programming experience (python), machine learning experience, knowledge of computer vision is a plus, knowledge of ml-based manipulation controllers is a plus (e.g. reinforcement learning, imitation learning)
Contact — Cheng Pan, [email protected]
To apply, please include a short motivation for this project, as well as a copy of your CV and transcripts.
Simulated Tactile Feedback for Learning Contact-Rich Robotic Manipulation (Master Thesis)

Outline: This project aims to simulate the tactile feedback that can be leveraged to improve any manipulation task using Reinforcement Learning or or Imitation Learning.
Background: Reinforcement Learning or Imitation Learning methods have been widely applied for robotic manipulations via sim-to-real transfer, typically with proprioceptive and visual information. However in fine-granded and contact-rich robotic manipulation tasks, tactile sensing is critical for the policy performance. However, how to simulate tactile feedback during the interaction between manipulator and objects is a challenge. Furthermore, if using the physics engine’s contact data (from MuJoCo, Isaac Gym, etc.) to approximate tactile feedback. The difference of fidelity and characteristics to real tactile sensor, and noise characteristics of the real sensor can affect the performance of learned policy. To deal with issue, we need to build a robust mapping between the tactile feedback estimated by simulator contact information and real tactile sensor reading.
Work Package:
In this project, we will first simulate the tatile feedback in a simulator. Then with the tactile input, we train a policy using RL/IL in simulation. By building a mapping between the tactile readings in simulation and real-world and apply domain randomization for the model parameters, we enable successfully transfer of policies from the simulation to the real robotic manipulator.
literature review about most recent related work 10%, simulation for tactile sensing 45%, algorithms development and implementation 45%.
Requirements — strong programming experience (python), machine learning experience, knowledge of tactile sensing is a plus, knowledge of ml-based manipulation controllers is a plus (e.g. reinforcement learning, imitation learning)
Contact — Cheng Pan, [email protected]
To apply, please include a short motivation for this project, as well as a copy of your CV and transcripts.
Sim-to-Real Transfer for Robotic Manipulation via Policy Distillation and Domain Randomization (Master Thesis)
Outline: This project aims to develop a robust and generalizable policy for robotic manipulation using Reinforcement Learning (RL), transferable from simulation to the real world.
Background:
For robotic manipulation, policies trained using RL can result in more general and robust dexterous skills. However, transferring these policies from simulation to the real world—known as the sim-to-real gap—presents challenges:
State Representation Mismatch: In simulation, full state information (e.g., object and manipulator poses) is available, whereas in the real world, only partial observations such as RGB images and robot proprioception are accessible. To bridge this gap, we need to distill the learned policy into one that can operate using real-world observations.
Behavioral Mismatch: The behavior of the robot in simulation often differs from that in the real world. Domain randomization is necessary during training to account for these discrepancies and improve policy transferability.
Work Package:
In this project, we will first train a policy using RL for a robotic manipulation task, leveraging privileged information during training. Domain randomization techniques will be applied to mitigate the sim-to-real gap. Once the policy is trained, we will distill it into a version that relies only on RGB images and proprioception. Finally, we will evaluate the policy on a real-world robotic system.
literature review about most recent related work 10%, simulation for robotic manipulation 40%, algorithms development and implementation 50%.
Requirements — strong programming experience (python), machine learning experience, knowledge of simulation for robot, knowledge of ml-based manipulation controllers is a plus (e.g. reinforcement learning, imitation learning)
Contact — Cheng Pan, [email protected]
To apply, please include a short motivation for this project, as well as a copy of your CV and transcripts.
Improving Policy via Expert Feedback for Robotic Manipulation Tasks (Master Thesis)

Outline: This project aims to improve robotic manipulation policies by incorporating expert feedback or corrective suggestions when the policy makes mistakes.
Background: Learning robust policies for complex manipulation tasks remains a challenge, as learned policies often fail in subtle or safety-critical ways. Rather than refining reward functions (in Reinforcement Learning) or randomly collecting more demonstrations (in Imitation Learning), a more effective approach is to query experts for feedback on failure cases. Such feedback can be evaluative (e.g., good/bad), preference-based (e.g., better than another), or corrective (e.g., in the state-action space). While corrective demonstrations provide the most informative guidance, they demand more effort. In contrast, evaluative and preference feedback are less burdensome to provide but may require larger quantities for equivalent performance gains. Exploring this tradeoff between feedback informativeness and expert burden is a key question. Moreover, effectively aligning a pre-trained policy with different forms of expert feedback remains a non-trivial and open challenge.
Work Package:
In this project, we will investigate policy update methods that incorporate different types of expert feedbacks. We aim to evaluate the effectiveness of each feedback type in improving policy performance, with particular attention to the tradeoff between feedback informativeness and the intervention effort required from the expert. The initial phase will focus on implementing and testing these methods in simulated environments. If time and progress permit, we will extend our experiments to a real-world robotic manipulation platform.
literature review about most recent related work 10%, simulation for robotic manipulation 40%, algorithms development and implementation 50%.
Requirements — strong programming experience (python), machine learning experience, knowledge of simulation for robot is a plus, knowledge of ml-based manipulation controllers is a plus (e.g. reinforcement learning, imitation learning)
Contact — Cheng Pan, [email protected]
To apply, please include a short motivation for this project, as well as a copy of your CV and transcripts.
Data Augmentation for Robust Policy Learning for Robotic Manipulation (Master Thesis)

Outline: This project aims to improve the generalization capability of robotic manipulation policies learned from expert demonstrations by leveraging data augmentation techniques.
Backgroud: Learning robotic manipulation policies from tele-operated demonstrations is often constrained by limited data, leading to poor generalization and out-of-distribution problems. To mitigate this issue, data augmentation is employed to enhance policy robustness by generating synthetic variations of the original data. These augmentations span object spatial poses, object types, camera viewpoints, environmental appearances, and different robot embodiments, thereby enriching the training set and improving the policy’s adaptability to unseen scenarios.
Work package: In this project, we will begin by reimplementing recent data augmentation algorithms within a simulated environment. Building upon these foundations, we will then explore the development of novel augmentation methods. If time and progress allow, we will optionally extend our work to a real-world robotic setup.
literature review about most recent related work 10%, simulation for robotic manipulation 40%, algorithms development and implementation 50%.
Requirements — strong programming experience (python), machine learning experience, knowledge of simulation for robot and data augmentation is a plus, knowledge of ml-based manipulation controllers is a plus (e.g. reinforcement learning, imitation learning)
Contact — Cheng Pan, [email protected]
To apply, please include a short motivation for this project, as well as a copy of your CV and transcripts.
(Master Thesis) Vision-based state estimation for Soft Continuum Robot in the unstructured environment
Soft continuum robots exhibit exceptional motion flexibility and reachability due to their inherent compliance, but their theoretically infinite degrees of freedom pose significant challenges for accurate pose estimation. While vision-based methods enable high-resolution state estimation, their performance degrades in unstructured environments where occlusions—particularly those arising from human-robot interaction—obstruct visual feedback. This project aims to overcome this limitation by integrating an inertial measurement unit (IMU)-based proprioceptive system to capture the robot’s internal state with high precision, even during complex interactions. The proprioceptive data will serve as ground-truth labels to train and validate a vision-based deep learning model, enabling robust 3D pose estimation under partial visual occlusion. The outcome will advance the deployment of soft continuum robots in collaborative settings, ensuring reliable operation in occlusion-prone scenarios.
This project aims to develop a learning-based visual estimation algorithm that utilizes dual-view cameras to achieve state estimation for soft continuum robots, ultimately enabling robust performance in partially occluded human-robot interaction scenarios.
Workpackages: 10% camera-based sensing system design, 20% soft arm kinematics modelling, 70% learning-based state estimation algorithm design.
Requirement: 1. deep learning algorithm background (ResNet, LSTM and Transformer), 2. robotic system dynamics background, 3. matlab and python programming experience.
Contact: [email protected] (Guanran Pei)
To Apply: please send email with CV, transcripts.
Online Learning of Dynamic Control for Soft Manipulators (Master Thesis)
Advisor(s): Qinghua Guan, Hao Ma, Cheng Pan
Supervisor(s): Prof. Josie Hughes, Prof. Melanie Zeilinger, Michael Muehlebach
Introduction
Soft robots offer notable advantages over rigid robots in terms of flexibility and compliance, which facilitate safe and robust interactions with environments. These characteristics make them ideal for diverse applications, such as medical contexts and bionic robotics. However, due to the absence of precise models and the time-varying nature of their system dynamics, achieving optimal control performance on soft robots remains a significant challenge. With the rapid development of machine learning, we now have various learning-based methods to achieve precise pose control of soft robots. Nevertheless, in practice, we have found that the (off-line) well-trained control policies often become ineffective upon deployment due to time-varying system dynamics, which lead us to rethink the traditional “sampling-training-deployment” paradigm in machine learning.
The rise of online learning can effectively enable models to adapt to changing system dynamics. Recent studies have shown that in online learning, even when using an approximate (or even linear) model, it is possible to ensure a sublinear convergence of the regret. Additionally, online learning demonstrates high learning efficiency and stability in both simulations and complex real-world systems.
In this project, we will adopt gradient-based stochastic online learning to achieve precise pose control of a soft manipulator. The cable-driven soft robot arm comprises three independent modules (about 0.2m for each module), and each module is actuated independently with three cables. More details of the robot setup, such as structural and mechanical description, can be found in our previous work. We will first establish an approximate model of the system, then learn both feedforward and feedback controllers in an online manner, which enable the soft arm to perform a series of acrobatic demonstrations. Finally, we will compare our approach with some existing offline control algorithms to evaluate the performance in terms of learning efficiency, handling distribution shifts, and tracking accuracy.
Requirements
- Highly motivated for the topic
- Programming experience (Python, PyTorch, Matlab)
- Knowledge of machine learning, convex optimization and dynamic systems
- Knowledge of reinforcement learning is a plus
- Practical experience in robotics applications is a plus
- Experience in vision systems is a plus
Contact (please cc all emails)
Qinghua Guan, [email protected], EPFL
Hao Ma, [email protected], ETHZ
Cheng Pan, [email protected], EPFL
To apply, please include a short motivation for this project, as well as a copy of your CV and transcripts.
Imitation Learning / Inverse Reinforcement Learning for Dexterous Robotic Manipulation (Master Thesis)
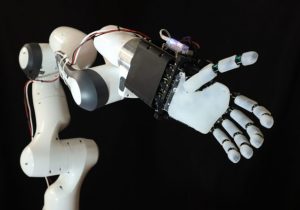
Outline
The goal of this project is to learn control policies for robotic hand manipulation tasks from a set of human expert demonstrations using inverse reinforcement learning and the IsaacSim simulation environment.
Motivation
Dexterous robotic manipulation tasks, like grasping different objects, are challenging control tasks due to the many degrees of freedom of a robotic hand and the variability of materials involved. Reinforcement learning with GPU-accelerated simulators like IsaacSim offers a promising solution, but sparse reward functions (e.g., only rewarding task completion) hinder efficient optimization. Hand-crafting dense rewards is difficult and often leads to suboptimal behavior. On the other hand, learning from human expert demonstrations via imitation learning or inverse reinforcement learning (IRL) can help to effectively guide policy optimization. While offline imitation learning approaches, such as behavioral cloning, are simple to implement, they often suffer from poor generalization due to covariate shift. The key problem is that the imitating policy performs poorly on states that were not encountered in the training data. In contrast, IRL allows to effectively incorporate new samples collected in simulation, which leads to improved generalizability. Moreover, IRL enables learning from state-only observations, potentially eliminating the need for teleoperation and simplifying the process of collecting expert data.
Milestones
- Simulation for robot hand based on IsaacSim.
- Extract human hand pose using a VR headset, and collect demonstration data.
- Develop imitation learning algorithm to learn a policy for the manipulation task.
- Add domain randomization to simulation, if necessary.
- Implement whole pipeline in real-world tests using a robot arm and multi-finger robot
hand.
- Combine imitation learning with RL to improve upon experts’ performance.
Requirements
We look for motivated students with a strong background in machine learning and coding. Furthermore, experience with ROS and robotic simulation is a plus.
References:
[1] Pan, Cheng, Kai Junge, and Josie Hughes. “Vision-Language-Action Model and Diffusion Policy Switching Enables Dexterous Control of an Anthropomorphic Hand.” arXiv preprint arXiv:2410.14022 (2024). https://vla-diffu-switch.github.io/
[2] Eze, Chrisantus, and Christopher Crick. “Learning by Watching: A Review of Video-based Learning Approaches for Robot Manipulation.” arXiv preprint arXiv:2402.07127 (2024).
[3] Hejna, Joey, and Dorsa Sadigh. “Inverse preference learning: Preference-based rl without a reward function.” Advances in Neural Information Processing Systems 36 (2024).
[4] Goecks, Vinicius G., et al. “Integrating behavior cloning and reinforcement learning for im-proved performance in dense and sparse reward environments.” arXiv preprint arXiv:1910.04281 (2019).
This project will be supervised by Prof. Josie Hughes, Prof. Maryam Kamgarpour, Cheng Pan ([email protected]), and Andreas Schlaginhaufen ([email protected]).
Contact: [email protected], [email protected],
Advancing proprioceptive sensing for squid-like swimming robotics (Thesis)

Summary: Advancing soft robotic swimmers requires integrating proprioception to sense motion without external aids, enhancing their adaptability and autonomy. Previous work presents an approach embedding pressure sensors in soft underwater structures, paired with learning-based methods to reconstruct shape and assess swimming performance. Robust proprioceptive sensing is demonstrated on a soft robotic squid. Extending this, we propose a fully sensorized robotic swimmer, incorporating embedded sensing across its tentacles and body to enable self-awareness of movement, improving control and performance without reliance on external systems like cameras. We also consider the possibility of integrating decentralized control for adaptive control maneuvers when the morphology changes (i.e. structure and shape of robot changes through damage).
References:
https://ieeexplore.ieee.org/abstract/document/10121999
https://www.nature.com/articles/s41467-024-54327-6
Workload: Programming (Python), Machine learning, Real-world robot testing, Hardware integration
Contact:[email protected], [email protected]
Adding steering to a parametric robotic swimming (Thesis)

Summary: A scalable, parametric design for bio-inspired robotic swimming fish enables adaptation across sizes and fluid environments. By leveraging minimal actuation and flexible but strong materials, the design stores and releases energy for bio-inspired swimming behavior. We would like to add a steering mechanism and integrate electronics into the fish. Experimental validation includes parametric design optimization, frequency response analysis, and field tests, showcasing adaptability to environments from small rivers to large lakes. This approach provides a versatile framework for designing swimming robots for applications such as environmental monitoring and ecological research, emphasizing efficiency and scalability across diverse contexts.
Workload: Programming (Python), Real-world robot testing, Robotic hardware design & integration
Contact: [email protected]
LLM-FoldIt, a Large Language Driven approach to robotic fabric folding
Summary: Deformable object manipulation (DOM) for robots has a wide range of applications in various fields such as industrial, service and health care sectors. However, compared to manipulation of rigid objects, DOM poses significant challenges for robotic perception, modeling and manipulation, due to the infinite dimensionality of the state space of deformable objects and the complexity of their dynamics. In this thesis, you will leverage the embedded physics intuition of Large Language models to create a policy for fabric handling and folding. The thesis aims at publication in top robotics journals.
References:
https://arxiv.org/abs/2208.10552
Workload: 50% Software development (computer vision), 50% Real world robotic testing and deployment
Contact: [email protected]
Visual Language Action models for Safe Collaborative Robots
Summary: Robotics has long been promising to come close to humans and support them in their daily living tasks (DLT). However, to do so, we require non-trained individuals to be able to give instructions to robots, and robots that can interact safely with humans. Visual Language action models provide a powerful tool to instruct robots through language but do not guarantee the safety of the generated policy. To ensure a safe deployment in close contact with people, we need to be able to deploy these algorithms on inherently safe robotic systems. In this thesis, you will train and deploy a Visual Langage Action Model on the Helix soft continuum manipulator, and demonstrate its capabilities on assistive, close contact tasks. The thesis aims at publication in top robotics journals.
References: https://openvla.github.io/
Research path:
- Define a family of trajectories for DLT and collect an Image-Action-Goal dataset.
- Train a Visual Language Action model
- Test and characterize the behavior on the real system
- Perform a demonstration of the acquired robot capabilities on the DLT
Workload: 70% Software development, 30% Real world robot deployment
Contact: [email protected], [email protected]
Bio-inspired Robotic Flower: A Lightweight Environmental Information Collection Unit Summary: Global environmental change, particularly rising temperatures, is causing alpine glaciers to retreat, severely impacting ecosystems and human societies. Understanding and monitoring biodiversity changes in glacial ecosystems is essential, especially regarding the relationship between insects and plants, which serve as key indicators of biodiversity and environmental change. Currently, data collection is conducted manually, limiting the number and scope of samples. There is an urgent need for new methods to improve data collection, analysis, and responses to ecosystem changes. Sensors applied in robotics, such as cameras, barometers, temperature sensors, and acoustic sensors are considered to hold great potential for environmental monitoring and data collection. Based on these sensors, we aim to design a lightweight workstation incorporating a biomimetic flower. This station is intended to attract and capture insects while simultaneously collecting environmental sounds, images of animals, and basic environmental information such as temperature and humidity, all for assessing biodiversity in the ecosystem.
Research path: 1. Biomimetic flower design for attracting and capturing insects.
- Raspberry Pi shield design for multi-sensor integration.
- Code development for biomimetic flower and multi-sensor platform.
- Outdoor experimental testing of the robotic station’s performance and environmental data collection.
- Processing and analyzing outdoor experimental data using AI tools to assess environmental species diversity.
Workload: 20% Literature review, 50% Hardware design and testing, 30% Programming and data processing
Contact: [email protected]
Wearable devices to enhance sensations for robotic hands (Semester/Thesis)
Summary: Wearable devices and smart gloves are revolutionizing human-machine interaction and robotic control. This project aims to develop wearable devices to enhance the sensing capability of robotic hands. Our goal is to gain in-depth understanding of human behaviour and human-machine-environment interfaces. The focus will be on innovative sensor integration (force, bending, temperature, proprioception, etc.), comfortable ergonomic design (wearables like gloves for both human and robot), and real-time data transmission and interaction with robotic hands.
Workload: 20% Sensor/actuator design and fabrication, 30% Wearable device integration and development, and 50% Software and data analysis. Required experience in computer vision (CV).
Contact: Benhui Dai ([email protected])
Chewing robot with mechanism design, sensing, and control (Semester/Thesis)
Summary: The process of chewing food is achieved through the up-and-down movement of the jaw and the shearing movement of the teeth. Develop a 6 DOF chewing robotic platform, including mouth, jaw, and tooth. The goal is to simulate the mechanical movements of humans chewing by robots and monitor this process by tactile sensors and cameras. What’s more, artificial saliva and a soft robotic tongue will be embedded into the system to provide a biomimetic oral environment for better food-robot interaction.
Workload: 50% design and fabrication, 50% control
Contact: Benhui Dai ([email protected])
Robotic cutting mechanism for semi-autonomous extraction of underground cabling (Thesis)
Summary: As the network of underground cables continues to grow, so do the difficulties associated with maintenance. Often cable ducts contain multiple sizes and types of power/communication lines (copper cables can regularly be >10cm in diameter), leading to challenges if a specific cable has to be replaced and damage to others needs to be avoided. This project will focus on developing a method to cut these cables that is both lightweight and compact, which can be integrated onto a small-scale robot. The goal is to transform typical, manual cutting methods into a portable, teleoperated or autonomous form, so that cutting can occur inside the duct rather than only at manhole entry points. Please apply if you have a strong mechanical/mechatronic background and are interested in mechanism design.
Workload: 10% Literature Search, 60% Design and prototyping, 30% Experimental validation (rough percentages)
Contact: Kyle Walker ([email protected])
Multi-modal compliant manipulators for unmanned marine robots (Thesis)
Summary: This project will investigate the use of naturally compliant manipulators for mobile, floating-base robots, which can be used for both classic manipulation of objects or to anchor the floating-base to a nearby structure by means of a “mode” (stiffness) change. The target use case will be for marine surface vehicles, however the design should be applicable to subsea vehicles as well. Both the physical manipulator design and programming teleoperated/autonomous control algorithms will be key aspects of the work. The end goal is to realise a working prototype and demonstrate this in a set of experiments – previous experience working with robots in a marine setting is beneficial but not crucial.
Workload: 10% Literature Search, 30% Design and prototyping, 30% Control, 30% Experimental validation (rough percentages)
Contact: Kyle Walker ([email protected])
Image-based terrain sensing for FLEXIV (Thesis)
Summary: FLEXIV (FLEXible Inspection Vehicle) is a two-track mobile robot with adaptable features, leveraging track flexibility and a real-time adaptive controller to navigate various terrains. It excels at adaptive slope climbing, stepping down, and recovery, guided by an IMU-based feedback control system. This project aims to develop an image-based controller for FLEXIV, utilizing onboard camera imagery for environment detection for better driving adaptation. It involves integrating the camera, ensuring data transfer and processing, and conducting thorough robot testing.
Workload: 50% Software development, 50% Robot testing and data collection
Contact: Sareum Kim ([email protected])
Image-based terrain sensing for FLEXIV (Thesis)
Summary: FLEXIV (FLEXible Inspection Vehicle) is a two-track mobile robot with adaptable features, leveraging track flexibility and a real-time adaptive controller to navigate various terrains. It excels at adaptive slope climbing, stepping down, and recovery, guided by an IMU-based feedback control system. This project aims to develop an image-based controller for FLEXIV, utilizing onboard camera imagery for environment detection for better driving adaptation. It involves integrating the camera, ensuring data transfer and processing, and conducting thorough robot testing.
Workload: 50% Software development, 50% Robot testing and data collection
Contact: Sareum Kim ([email protected])
Machine learning approaches for reliable multimodal sensory interfaces (Thesis)
The human skin is capable of detecting multiple sensory stimuli in a selective manner. Artificial sensory interfaces attempt to mimic the multisensory features of our human skin, but classifying responses when multiple stimuli are present remains a challenge. With 3D printing methods, conductive sensory patterns can be integrated into inert substrates, mimicking the way sensory receptors are positioned into human skin. The final goal of the project is to exploit data-driven machine learning based approaches, to enable classification and localization of an applied sensory stimulus upon a 3D printed E-skin interface, even when multiple stimuli are simultaneously present.
Workload: 10% Literature search, 50% Prototyping, 30% Programming and data curation, 10% Thesis Writing
Contact: Antonia Georgopoulou ([email protected])
Design and data analysis of soft optical fiber sensor for proprioceptive sensing (Thesis/Semester)
Proprioception is our body’s ability to sense its position and movement in space. We’re working on developing a soft sensor that uses light to detect bending motion and location within a single flexible fiber. The setup consists of a light emitter on one end and a color sensor on the other. As the fiber bends or deforms, the color sensor detects changes in the transmitted light, providing data about the movement. Our goal is to optimize the design of this soft optical fiber sensor to deliver the most accurate and responsive data. By analyzing the collected data with machine learning, we aim to enhance the sensor’s capabilities for proprioceptive sensing applications.
Workload: 40% Design and fabrication 40% Data analysis 10% Literature search 10% Writting
Contact: Haewon Jeong ([email protected])
Study and Implementation of Autonomous Energy Solutions for Mobile Robotic Applications (thesis)
Energy autonomy is a critical challenge in mobile robotics, limiting operation time and effectiveness in prolonged tasks, particularly in remote or resource-constrained environments. This thesis aims to study, analyze, and implement energy harvesting and storage systems to enable self-sustained robotic operations. By leveraging renewable energy sources such as solar, wind, or biomass, the goal is to design and demonstrate a practical energy autonomy solution for low-tech mobile robot platforms. The research will provide insights into the feasibility, efficiency, and integration of various energy solutions in robotic systems.
Possible sustainable energy sources to study more extensively are :
- Digestion/fermentation of biomass
- Digestion/fermentation in aqueous environments
- Wind
- Solar
- Kinetic energy storage from robot motion
Workload: 30% literature review and comparison of different energy solutions, 30% prototype design, 30% tests.
References
- Towards enduring autonomous robots via embodied energy | Nature
- “Gastrobots”—Benefits and Challenges of Microbial Fuel Cells in FoodPowered Robot Applications
- Row-bot: An energetically autonomous artificial water boatman | IEEE Conference Publication
- Power solutions for autonomous mobile robots: A survey – ScienceDirect
Contact: Arnaud Klipfel ( [email protected] )
Robotic Stomach Design (thesis)
Digestive malfunctions are linked to a variety of health conditions, including metabolic disorders, brain lesions, and gastrointestinal diseases. Current research in digestive systems lacks a reliable, controlled method to replicate the physical and mechanical processes of the human stomach. This thesis aims to design and prototype a robotic stomach that mimics the motions and environmental conditions of human digestion. By reviewing existing artificial stomach designs and integrating advancements in soft robotics, the research will create a minimalistic model suitable for replicating the mechanical digestive motions.
- State of the art review
- Mechanical design and fabrication
- Actuation
- Tests
Workload: 30% literature review, 30% prototype design, 30% tests.
Contact: Benhui Dai ([email protected]), Arnaud Klipfel ([email protected])
Sensitivity improvement and calibration of tactile sensor with hall-effect sensors
Summary: We have developed a soft tactile sensor by using a magnet and a hall-effect sensor. This sensor detects external stimuli by measuring changes in magnetic flux caused by the displacement of the magnet due to external forces. In this project, we aim to enhance the sensor’s sensitivity through design modifications or changes in the soft substrate material. The second objective is to investigate and calibrate the correlation between the improved sensor’s signal and the applied force. Through this project, you will learn the mechanism of soft sensors and magnet-based tactile sensors. In addition, you can acquire basic data processing skills and experience in sensor calibration.
Workload: 5% literature study, 45% design and fabrication (CAD, 3D printing, and silicone fabrication), 35% programming and data post-processing (Python and Arduino), 10% Experimental setup
Contact: Sudong Lee [sudong.lee (at) epfl.ch]
Feedback control of the cable-driven spherical joint
Summary: We have developed a cable-driven spherical joint with a wide workspace and 3 degrees of freedom (rotation). Currently, this joint is capable of open-loop position control based on an analytic model or a model trained using machine learning (supervised). In this project, we aim to embed a sensor such as IMU into the joint and complete a closed-loop system to enhance position control accuracy. Through this project, you will gain knowledge of the fundamentals of motor control and basic closed-loop control.
Workload: 10% literature study, 45% programming and data-processing (Python and Matlab), 40% control, 5% Experimental setup
Contact: Sudong Lee [sudong.lee (at) epfl.ch]
Vision-based Configurations Estimation of Soft Continuum Manipulators (Thesis)
Summary: Soft continuum manipulators, like those modeled after elephant trunks, offer greater safety and flexibility because they can deform to absorb impacts and have virtually unlimited movement possibilities. These features make them ideal for interactions in unstructured settings. However, controlling these manipulators precisely is challenging due to their extensive deformability. The piecewise constant curvature model helps in effectively sensing and managing their movement.
For configuring soft manipulators, various sensing systems including external motion capture and internal IMU-based systems are used, which show good accuracy but have limited sensing capabilities. Vision-based systems, potentially offering unlimited sensing capabilities, are expected to provide more accurate configuration reconstructions. Deep learning techniques are useful for identifying object shapes, and this study aims to develop a neural network to define and reconstruct the configuration of a specific soft robot named “Helix v1” based on these identified shapes, even in visually obstructed, unstructured environments.
Link to proposal: https://drive.google.com/file/d/1-bAx0HVkEPJ4X6GTsJZVfePo3m5Jr6XJ/view?usp=drive_link
Link to previous soft sensing research: https://drive.google.com/file/d/1crSa5Z6a9zsTq8MjV8qEY5D2P5GE0Q0i/view?usp=drive_link
Workload: 30% hardware, 70% software
Contact: Guanran Pei ([email protected])
[filled] Control / Learning / (Haptic) teleoperation on a dexterous robotic hand (Thesis Project)
TL;DR:
A thesis project to perform some control/learning/teleoperation using the ADAPT Hand v2. Details and directions up to discussion.
Summary:
The ADAPT Hand v2 is an anthropomorphic robotic hand developed in this lab. However, the control of such a hand for robotic tasks are non-trivial given the complexity of manipulation and the robot itself.
Recently the hand has acquired tactile sensors in its fingers and thumb, and a teleoperation system using the Apple Vision Pro headset (See video).
We have several projects lined up with all potential to roll them out as master thesis projects.
1. Shared control using tactile feedback with the sensorized robotic hand to assist kinematics based teleoperation.
2. (Potentially bimanual) Dexterous manipulation leveraging immitation learning through real world data collection.
3. Using haptic feedback to control not only the position but also the force of the interaction of the robot hand.
If you also have ideas related to this we can discuss!
Skills involved / would be nice if you are confident or touched upon even a few:
– Data collection, processing
– Robotic systems integration (not really to integrate systems but have experience and intuition on working with complex systems with multiple processes and parts etc)
– Robotic hardware (in the sense that you will be working with a physical robot)
– Programming with Python
Contact: Kai Junge ([email protected])
Whegs for our GOAT (Thesis or Semester Project)
Summary: Our GOAT(Good Over All Terrain) robot would be delighted to obtain a set of new compliant wheel-legs to increase its operational range, robustness and efficiency. Your project involves evaluating existing compliant wheel-leg mechanisms and designing and prototyping a compliant wheel-leg mechanism. Please apply if you have prior experience in mechanism design, prototyping with non-rigid, compliant materials and are fascinated about mobile, outdoor robots.
Workload: 20% Literature research, 50% Prototyping and design, 30% Experimental validation ( these are arbitrary percentages 😉 )
Contact: Max Polzin ([email protected])
Parachute for our GOAT (Thesis or Semester Project)
Summary: Our GOAT(Good Over All Terrain) robot would be delighted to augment its flying capabilities with gliding as gliding offers increased efficiency for controlled aerial descend. For this, it is your task to adapt and equip our GOAT with an RC parachute. Please apply if you have prior experience in rapid prototyping and servo control and are fascinated by flying/gliding robots.
Workload: 30% Prototyping and design, 30% Control, 40% Experimental validation ( these are arbitrary percentages 😉 )
Contact: Max Polzin ([email protected])
Drowning our GOAT (Thesis or Semester Project)
Summary: Our GOAT (Good Over All Terrain) robot can swim, fly and drive. It is time for it to venture into new realms and go diving. Your task will be to waterproof the GOAT’s electronics, design a prototype buoyancy system and showcase the feasibility of underwater locomotion. Please apply if you have prior experience working with mechanical prototyping and working with water and electronics.
Workload: 15% Literature research, 55% Prototyping and design, 10% Control, 20% Experimental validation ( these are arbitrary percentages 😉 )
Contact: Max Polzin ([email protected])
[filled] Tendon-Driven Lightweight Robotic Arm for Agricultural Applications (Semester)
Summary: Develop a tendon-driven 7-DoF robotic arm with two-to-three end effectors used in harvesting, such as scissors and grippers. The goal is to minimize joint weight and inertia generated during fast motion. It can be based on the current robotic arm we have and modify it accordingly. Workload: 90% Design, 10% Control
Contact: Paul Cheng ([email protected])
[filled] Motion Stabilization of a floating robot (Semester)
Summary: Analyze and mitigate vibrations caused by a robot moving on a rope. Develop a control approach and mechanical damper to reduce oscillation or explore other methods. The closest scenario is similar to [ https://doi.org/10.1016/j.engstruct.2022.115527] or cable cart, but on a smaller scale with a robot involved. Simulation with an appropriate control method may suffice. The main goal is to stabilize the real robot in its desired position and orientation.
Workload: 60% Modeling and Control, 40% Hardware Design.”
Contact: Paul Cheng ([email protected])
[filled] Analyze and cancel out vibrations caused by the robot moving on a rope.
Develop a control approach and mechanical damper to reduce oscillation (or explore other methods). The situation is similar to but on a much smaller scale and with a robot on it. Simulation with a proper control method might be sufficient. The final goal this the stabilize the real robot in the desired position and orientation.
Workload: 60% Modeling and Control, 40% Hardware Design
Contact: Paul Cheng ([email protected])
[filled] Vision and Motion Training for Harvesting Robotic Arm (Thesis)
Summary: We have a mobile robotic arm designed for harvesting strawberries. We aim to implement a learning-based approach to navigate the robot arm to reach the target position and perform harvesting. Motion data will be captured through teleoperation. The goal is to explore ways to expedite the harvesting process.
Workload: 70% Programming, 30% Hardware Design
Contact: Paul Cheng ([email protected])
Control a soft arm with its twin (Semester/Thesis)
Summary: The inverse kinematics of a soft arm are complex and costly for real-time control. However, the physical world acts as an unparalleled simulator in terms of speed and realism. This is why we use a reduced-scale physical twin to control a larger-scale soft arm robot. Naturally, there are some discrepancies between the two arms, which is precisely what we aim to resolve.
Workload: 90% Programming, 10% Hardware Design, 20% Experimental test, 60% Programming for control, 20% Modeling
Contact: Qinghua Guan ([email protected])
3D printed sensor inspired by the human skin (Semester/Thesis)
Background: Human Skin Sensing
Human skin sensing relies on an intricate network of receptors and neurons embedded within the skin. These receptors vary in their functions, structures, arrangements, and receptive fields. The neural structure not only transmits sensory signals to our brain but also preprocesses this information. It can even influence human behavior through low-level conditioned reflexes. Together, these elements shape our perception of the environment.
Project Goal:
The aim of this project is to develop a multi-functional sensor system that integrates multiple receptors and reconfigurable neurons. This system will investigate the synergistic effects of different sensors and neurons working in concert.
Workload: 70% Hardware Design, 20% Programming for control, 10% Modeling
Contact: Qinghua Guan ([email protected])
Simulation or physics modeling for underwater swimming soft robots using (Thesis)
Summary: Simulating underwater soft structures is challenging. The field has not been explored as much compared to computational fluid dynamics analysis of rigid structures. We have a squid-inspired swimming robot that swims using its 4 soft tentacle arms. We would like to close the simulation-to-reality gap for this robot. Please apply if you have strong simulation or physics-modeling skills.
Workload: Simulation 80%, Analysis 20%
Contact: Nana ([email protected])
[filled] Exploring the embodiment of a soft sensor (Semester/Thesis)
Summary: We want to explore how the controllability of robots change if we have different embodiments of a soft sensor. This project will involve fabrication of a soft strain sensor and testing. Please apply if you have strong mechatronics and embedded systems skills.
Workload: Sensor fabrication 30%, Experiments and system integration 70%
Contact: Nana ([email protected])
Developing a buoyancy bladder for soft swimming robots (Semester/Thesis)
Summary: We have a number of soft swimming robots that need buoyancy control. Currently they are attached to a big floating platform. Your job would be to develop a buoyancy bladder that can be integrated to an existing swimming robot. If you are good at hardware design and fabrication and have previous underwater mechatronics experience, please apply.
Workload: Hardware design and testing
Contact: Nana ([email protected])
[filled] Arts and Soft Robotics (Semester/Thesis)
Summary: This is an open-ended project. We want you to design and build an interactive arts display using soft robotic components or ideas. The underlying aim is to delve into the potential of soft robots in the entertainment field or the potential for them to positively affect human life. Once the piece is built, we will conduct user studies on the human-robot interaction. Creative individuals with prior mechatronics and building experience are welcome.
Workload: Design and Fabrication 70%, User studies and analysis 30%
Contact: Nana ([email protected]) Please have a rough idea of your arts display before contacting!
[filled] Chewing robot mechanism design and control
Summary: The process of chewing food is achieved through the up and down movement of the jaw and the shearing movement of the teeth. Develop a simple chewing robotic system, including mouth, jaw and tooth. The goal is to simulate the mechanical movements of humans chewing by robot, and monitor this process by sensors and camera.
Workload: 50% design and fabrication, 50% control
Contact: Benhui Dai ([email protected])
[filled] Pneumatic soft robotic actuators for healthcare (Semester/Thesis)
Summary: Soft robots are made from highly flexible materials that mimic the properties of living organisms, which allows them to adapt to complex environments and friendly interactions. In this project, our goal is to learn the principles of soft robotics, focusing on the structural design of novel actuators, their fabrication with curing and 3D printing, and their control with pneumatic devices.
Workload: 40% Design and fabrication, 30% Hardware, and 30% Control
Contact: Benhui Dai ([email protected])
Anthropomorphic robotic hand augmentation and design space exploration (Thesis)
Summary: With our approach for parametric design and modular actuation, we can create skeletal robotic hands rapidly (<1 day) with high functionality and dynamic capabilities. We want to explore how the hand behaviours evolve with the morphology by replicating and generating and testing diverse hand designs, including primate hands. Additionally, the project would involve augmenting the hand with naturalistic features, such as a soft skin and tactile sensors. You project would involve mechanical design, 3D printing/rapid prototyping, experiment design and analysis. Please apply if you are interested in robotic manipulation and developing integrated systems.
Workload: 50% design and fabrication, 20% modelling and control, 30% experiment design and analysis
Contact: Kieran Gilday ([email protected])
[filled] Implementation and test of a morphology agnostic controller for legged robots using Reinforcement Learning and Generative AI (semester)
Summary : The goal of this project is to adapt and transfer a controller from one morphology to another. Supposing that we have a controller for a given design and task, how can we generate a controller for another design? Current approaches merely retrain the controller in model-free settings or use a different model corresponding to the new design. This is very data expensive and does not re-use anything from what we already have. A main issue in the controllers that are designed in Robotics now is that they are always very specific, single-use, disposable, and are not reusing prior knowledge efficiently and exploiting other controllers that we have on hand.
The proposed approach is to use Reinforcement Learning to adapt a controller using a Generative Model, more specifically a GAN. Conditioned on the morphology and joint locations, the GAN could generate adapted reference trajectories for the target design.
Apply if you are interested in learning about RL, using RL gyms, generative models. You should have coding experience in Python, and some basic understanding of Deep Learning.
workload: 80% implementation of python code and tests, 20% literature review, research for modifications
Contacts: Arnaud Klipfel ([email protected])
[filled] Data collection and processing of plant electro-physiological signals (summer project/semester)
Summary : Plants respond to external stimuli in different ways, these responses can be measured or detected using electro-physiological sensors. If proper signals are collected and suitable models are built, it would be possible to use plants as sensors. Using electrophysiological sensors your goal will be to set up an experimental platform to record these signals and collect a dataset in different light conditions. If time allows, we will build a generative model to predict the light condition changes based on the plant internal state.
Workload : 30% set up of sensor, and plants, 30% data collection, 40% result analysis
Contacts: Arnaud Klipfel ([email protected])
[filled] Wearable devices to enhance sensations for robotic hand (Semester/Thesis)
Summary: Wearable devices and smart gloves are revolutionizing human-machine interaction and robotic control. This project aims to develop wearable devices to enhance the sensing capability of robotic hands. Our goal is to gain in-depth understanding of human behaviour and human-machine-environment interfaces. The focus will be on innovative sensor integration (force, bending, temperature, proprioception, etc.), comfortable ergonomic design (wearables like gloves for both human and robot), and real-time data transmission and interaction with robotic hands.
Workload: 40% Sensor/actuator design and fabrication, 30% wearable device integration and development, and 30% Software and data analysis
Contact: Benhui Dai ([email protected])
Building Adaptive Controller for Rolling Robot (Summer Project)
Summary: The Rolling Robot project focuses on the development of a flexible and soft 1-D locomotion platform designed to navigate complex terrain using adhesive locomotion. To enhance adaptivity in locomotion, we aim to implement sensors and controllers capable of detecting upcoming terrain geometry and ensuring stable locomotion. Your role will involve modifying the design of the existing rolling bot, designing controllers for adaptable locomotion, and conducting robotic experiments to validate performance.
Workload: 20% Prototyping and design, 50% Experimental validation and data collection, 20% Modeling and Simulation
Contact: Sareum Kim ([email protected])
Cartesian Robots in a wet lab: tracking bacteria growth (Thesis/Semester)
Summary: To lower the access barrier to lab automation we developed a cartesian robot that can pick and place laboratory labware such as petri dishes and, by using computer vision, can assess how different bacteria colonies grow. The robot is currently deployed in a real wet laboratory at UNIL. The candidate will implement new computer vision strategies to track bacteria growth and will improve software and hardware components.
Workload: 40% hardware, 60% Software
Resources: https://www.epfl.ch/labs/create/create-lab/lab-spin-offs/ + more upon request
Contact: Vincenzo ([email protected]) & Francesco (francesco.stella@epfl@ch)
Automating light scattering (Semester)
Summary: Light scattering is a technique used to examine the unique properties of protein solutions that don’t behave as expected. To do this effectively, scientists need to test the proteins at various concentrations. However, manually adjusting these concentrations can be a long and error-prone process. This project aims to simplify this task by automating the process of mixing protein samples using a dual syringe system. The system will be built in the course of the project using existing technology that is already used in the lab.
More info will be given upon request.
Workload: 25% Mechanical design, 25% Fabrication, 50% Experimental
Contact: Vincenzo ([email protected])
Autonomous Navigation Integration in Cleaning-Bot for Efficient Path Cleaning (Semester)
Summary:
In the framework of the Swiss CAT+ project, we have developed a concept for the transfer of chemical samples based on a fleet (or swarm) of mobile mini-robots developed locally with ROS and designed around the typical shape of the sample. They are equipped with Ultrasonic sensor to measure their position in the lab. We plan to have about 10 of these mini-robots running in a track suspended above the scientific instruments. The track and the robots already physically exist. The transfer between the scientific instruments and the mini-robots in their track will be handled by 6-axis cobots (Universal Robots 5e or 10e) assisted by a set of industrial cameras for precise positioning.
The objective of this project is to implement an already developed navigation algorithm, originally designed for a similar robot, into the Cleaning-Bot. This integration aims to utilize the Cleaning- Bot’s existing sensor systems to achieve efficient and autonomous cleaning along a predefined track. The challenge lies in adapting and optimizing this existing navigation algorithm to fit the specific hardware configurations and cleaning requirements of the Cleaning-Bot.
OSS. Previous ROS knowledge is highly desirable
Deliverables:
- a) Algorithm Adaptation: Study the existing navigation algorithm and understand its compatibility with the Cleaning-Bot’s sensor systems.
- b) Software Integration: Implement the navigation algorithm into the Cleaning-Bot’s software framework, ensuring seamless integration with its hardware.
- c) Customization and Optimization: Customize the algorithm parameters to optimize the Cleaning-Bot’s path planning, obstacle avoidance, and area coverage capabilities.
- d) Testing and Validation: Conduct extensive testing in various environments to validate the performance of the Cleaning-Bot with the integrated navigation system. Adjust and finetune the algorithm based on real-world feedback and performance data.
Contact:
Edy ([email protected]) & Vincenzo ([email protected])
Development of a Battery Exchange System Using a 6-Axis Robot(Semester)
Summary:
In the framework of the Swiss CAT+ project, we have developed a concept for the transfer of chemical samples based on a fleet (or swarm) of mobile mini-robots developed locally with ROS and designed around the typical shape of the sample. They are equipped with Ultrasonic sensor to measure their position in the lab. We plan to have about 10 of these mini-robots running in a track suspended above the scientific instruments. The track and the robots already physically exist. The transfer between the scientific instruments and the mini-robots in their track will be handled by 6- axis cobots (Universal Robots 5e or 10e) assisted by a set of industrial cameras for precise positioning.
This project aims to develop a prototype system that automates the battery exchange process for a mobile robot using a 6-axis cobot from Universal Robots. The current mobile robot uses a fixed battery system that requires manual replacement upon discharge. An automated system for battery exchange would significantly enhance the robot’s operational efficiency.
OSS. Previous ROS knowledge is highly desirable
Deliverables:
- a) Design of Removable Battery Module: Develop a modular battery system similar to those used in hand drills, which can be easily detached and attached to the robot.
- b) Development of Exchange Mechanism: Utilize a 6-axis Universal Robot to create a mechanism that can autonomously remove a discharged battery from the mobile robot and replace it with a charged one.
- c) Programming and Automation: Program the Universal Robot for precise movements required for the battery exchange process.
- d) Testing and Refinement: Test the prototype under various scenarios to ensure reliability and safety. Refine the system based on feedback.
Contact:
Edy ([email protected]) & Vincenzo ([email protected])
6-month paid robotics internship opportunity
More information here: Internship In Wind Turbine Control
Contact: [email protected]
[closed] Designing a modular robot for simulating cell growth and division in fluid environments (Thesis)
Summary: This project aims to develop modular robots that simulate cell growth and division using a combination of soft materials and/or polymers. The focus will be on designing and fabricating these modular robotic units, intending to replicate the fundamental processes of cell development. Operating in a fluid environment, such as water, the robots will emulate the dynamic nature of real cells. The project requires significant mechanical design and fabrication skills to ensure the successful construction of these robotic units. The research outcomes have the potential in offering new insights into cellular behavior and inspiring innovative technological applications.
Workload: 50% Mechanical design, 50% Fabrication
Contact: Nana ([email protected])
Examining collaboration between multiple Cartesian robotic arms (Thesis)
Summary: To accomplish diverse manipulation tasks in environments like laboratories or kitchens, the use of dual robotic arms becomes essential. While programming and synchronizing 6-DOF articulated robotic arms pose challenges, employing simpler yet versatile systems like Cartesian platforms often suffices for numerous tasks. The lab’s current two-arm Cartesian setup has demonstrated high reliability in automating lab tasks such as unscrewing caps, pipetting, and dispensing.
This project aims to explore collaboration beyond two cartesian robotic arms. Investigating horizontal or vertical stacking methods can prove viability of a ‘continuous manufacturing line’, while examining how multiple robotic arms (3, 4, or more) can share the same workspace can prove beneficial for execution of highly complex tasks.
Your responsibilities will involve testing various stacking concepts, with real-life demonstration of the best configuration across a series of tasks. This project will require design and building of additional arms and end-effectors but will also require robot-arm programming and exploration of viable control methods. This project has high potential for publication in robotics journals.
Link to previous research: https://drive.google.com/file/d/1E-8BRuCfi-gVaQx2MU9WtCLMqsCOznSF/view?usp=sharing
Link to videos:
https://drive.google.com/file/d/1E-fPgmKiFfA_UAA22IgYzuZ2xN6rB_tC/view?usp=sharing
https://drive.google.com/file/d/1E-zj12UVV84gPPo1B9oSZM7rDngKlSxB/view?usp=sharing
Workload: 50% hardware, 50% software
Contact: Stefan ([email protected])
Autonomous Tethered TriPod for Enhanced Biomass Quantification in Dense Forests (Thesis)
Summary: Accurate quantification of forest biomass is essential for understanding carbon sequestration and ecosystem health. Traditional methods, however, are often labor-intensive and subject to human error. This project aims to design and implement an autonomous motorized tripod system capable of traversing along a tether and utilizing an onboard laser scanner for precise biomass measurements. The system will feature ground anchoring for stability during data acquisition and a roller mechanism for seamless repositioning. You will be responsible for developing the mechanical design of the tripod, integrating a laser scanner, and programming the movement and data processing algorithms. The project will culminate in field trials to demonstrate the system’s efficacy and potential publications in leading environmental and robotics research outlets.
Workload: 70% Mechanical design and integration, 30% Field testing
Contact: Max ([email protected])
Enhancing passive walking in the PAWS quadruped with embodied contact sensing (Thesis)
Summary: Biological systems display an incredible diversity in behaviors and motion capabilities. It has been shown that for most tasks, only a subspace of the possible poses is used. We propose to exploit minimal feedbacks from contacts at the paws to develop bio-inspired controllers that exploit the embodied passive properties of the PAWS robot. In this thesis you will start by integrating contact sensors in the PAWS quadruped robot, and then link the sensor readings into minimal control inputs to achieve diverse yet stable locomotion strategies. In the thesis we will continue optimizing the design, manufacturing and control of a biomimetic cheetah with a reduced set of actuators. Potential publication of results in top Robotics venues.
Link to prior research: https://www.researchsquare.com/article/rs-3195331/v1
Workload: 70% Mechatronics design, 30% Control design
Contact: Francesco ([email protected]) & Sudong ([email protected])
Exploiting dynamics for fast soft robots (Thesis)
Summary: Soft robots are celebrated for their ability to efficiently store energy in their bodies, and efficiently releasing them during repetitive motions . We propose to exploit this capability to generate the most energy efficient manipulator, able to perform highly dynamic movements with minimal energy consumption. In this thesis you will start by estimating the eigenfrequecies of the Helix manipulator thanks to the embedded proprioceptive sensing. You will then merge the eigenfrequency excitations into a higher level controller to perform efficient periodic motions. Potential publication of results in top Robotics venues.
Link to prior research: https://www.nature.com/articles/s44182-023-00004-7
Workload: 80% control, 20% Mechatronics design
Contact: Francesco ([email protected]) & Qinghua ([email protected])
Soft arm with high load capability: designing, building and modeling (Thesis)
Summary: Leveraging the designability of architectured material/structure, develop a soft manipulator with inertia compliance and also high load capability
-3D Printing of architected arm structure with deliberate mechanical properties.
-Build a tendon-driven robot with soft structure and a rotating basement
-Build the open-loop control of the robot based on mechanical modeling
Workload: 60% hardware, 40% Software
Contact: Qinghua ([email protected])
Soft sensor with multi-mode and programmable sensing (Thesis)
Summary: Develop a sensor with multi-mode sensing(shearing/compression) ability based architectured lattice material. Lattice materials have various mechanical properties. By involving different mechanical responses of lattice materials, the sensor can achieve different sensitivity to different .
-Design and 3D Printing of architected lattice foams
-Design and build capacitive (or resistance/optical ) sensors (including the PCB design for the signal collecting) with programmed lattice structures to achieve different sensing property and modes in different areas.
-Design and build capacitive (or resistance/optical ) sensors (including the PCB design for the signal collecting) with multi-mode sensing with shearing, twisting and compression based on multi-layer lattice structures.
Workload: 80% hardware, 20% Software
Contact: Qinghua ([email protected])
Electrostatic adhesion sheet and Characterization (Thesis)
Summary: Fabricate a centimeter-scale electrode and develop a circuit to generate adhesion force (for grasping applications) via electrostatic.
– Make the circuit to generate high voltage and optimize the circuit in compact
– Design patterns for the electrode
– Characterize normal and shear forces according to the input voltage
Workload: Fabrication (20%), Electronics (50%), and Experiment (30%)
Contact: Sudong ([email protected])
Design soft skin with special patterns for adhesive force (Thesis)
Summary: Design soft skin for a rigid robot hand having electrostatic adhesion sheet. We are going to develop patterns and structures of the skin to amplify or optimize electrostatic effects for manipulation.
– Design and make soft skin with silicone
– Embed the electrostatic adhesion sheet
– Test and verify the effects of the patterns and electrostatic forces in grasping applications
Workload: Design (35%), Fabrication (35%), and Experiment (30%)
Contact: Sudong Lee ([email protected])
(Master thesis) Surgeon test bed : Self-healing phantom for suture practice
In collaboration with CyRIS Lab in Max Planck Institutes (https://is.mpg.de/cyris)

Description — Suture training is essential in medical training of surgeons. However, it is hard to monitor and assess suture quality using the current suturing pad which is normally made of silicone. Since quantitative measuring of suture placement, damage and recovery time is absent. Thus developing a robotic phantom that is capable of self-healing and sensing is needed so that it can measure damage, suture placement and recovery time. By using self-healing hydrogel with electrical impedance tomography, we are aiming to measure the resistance change of the full surface and reconstruct the image of damage such as cutting, suture placement, etc and also monitoring the recovery time of hydrogel. At the end of the project, the developed phantom will be tested by surgeons and surgical robots in Max Planck Institutes for user study.
30% Design and fabrication of phantom, 20% Programming of microcontrollers, and 20% Image reconstruction of damage, 20% User study with surgeons
Requirements — Prototyping skills (3D printing, molding), electronics skills (microcontroller), programming skills (python, MATLAB)
Contact — Haewon Jeong ([email protected])
To apply, please include a short motivation for this project, as well as a copy of your CV and transcripts.
Design and control of miniature continuum robots for neurosurgery (Thesis)
Summary: Soft continuum robots can reduce surgery invasiveness with safer approaches and low force interactions. Following conversations with practicing neurosurgeons, we want to develop a novel robot combining concentric tube robots and tendon-driven continuum robots for a simple to control system with guaranteed safety during operations. This project involves:
- Developing scaled prototypes using 3d printing and other fabrication techniques
- Developing position/tendon actuation and control systems
- Characterising the system using our sensorised brain phantom
Workload: Design/fabrication (50%), Control systems (40%), and Experiment (10%)
Contact: Kieran ([email protected])
[closed] Scaling up underwater swimming soft robots (Thesis)
Summary: Sea creatures exhibit amazing maneuverability underwater. Many soft fish-like robots exist that are capable of navigating underwater complex environments. However, scaling these robots up to larger sizes pose challenges and have been relatively unexplored. Using materials such as carbon fiber rods, the goal of this thesis is to create a large (>2m), light-weight, soft swimming robot and then to analyze performance capabilities.
Workload: Design 20%, Fabrication 40%, and Experiment/Analysis 40%
Contact: Nana ([email protected])
[closed] Simulation for underwater swimming soft robots using DiffPD (Thesis)
Summary: DiffPD is a fast differentiable simulator for soft-body learning and control applications. In this thesis, you will create a simulation for soft underwater swimming robots using DiffPD which will help close the simulation-to-reality gap with our robot hardware.
See here for more information about DiffPD: http://diffpd.csail.mit.edu/
Workload: Simulation 80%, Analysis 20%
Contact: Nana ([email protected])
[closed] Large-scale data capture and online optimization of structures in water (Thesis)
Summary: Previously, we have used a robot scientist to automatically optimize a paper airplane shape so it flies a specified distance when thrown. Robot scientists are particularly useful in that they can collect a lot of data autonomously. In a similar way, we want to see if we can create a closed-loop platform where we gather feedback from fluid dynamics using PIV to optimize a shape underwater autonomously. Your thesis will involve hands-on setup creation, experiments, and optimization.
See a related paper here: https://www.nature.com/articles/s41598-023-31395-0
Workload: Design/Fabrication 40%, Experiment 40%, Optimization 20%
Contact: Nana ([email protected])
Concentric tube robot for neurosurgery (Thesis)
Summary: Developing a miniaturised concentric tube robot that has additional tendon driven steering at the tip for various neurosurgery applications.
Workload: 50% Design and fabrication, 50% Control and Modelling
Contact: Kieran Gilday ([email protected])
Hand Evolution Analysis (Thesis)
Summary: Using our single print approach for hand manufacture, we want to explore how the passive properties and morphology has evolved with species/time. To do so, this project will involve creating benchmarking methods and analysis, and exploring different hand designs and structures.
Workload: 50% Experiment design and analysis, 50% Fabrication and design
Contact: Kieran Gilday ([email protected]) & Cheng Pan ([email protected])
[Temporarily closed] RoboCup @Home MAKE Project — Software Engineering (Semester)
Summary:
RoboCup @Home is a MAKE Project where we aim to build a home service robot to participate in the international robotics competition: RoboCup. The aim of this project is to work on the software systems of the robot. Software tasks will be around navigation and behavioural tree of the robot.
In both cases, the student should have some level prior experience in relevant fields, as the project requires practical knowledge to integrate state of the art technologies. Specific project directions will be discussed with each student based on their interest and past experience.
Workload:
– 80% technical development / robotic integration
– 20% decision making and planning of the project with other team members
Contact:
Max Polzin ([email protected])
Synergy Based Quadruped (Thesis)
Summary: In previous projects, we have used the concept of motor synergies to create an underactuated quadrupedal robot that exploits passive behaviours for robustness. In this project we aim to improve the mechatronics to improve the walking speed, and also investigate further the actuation and emergent properties.
Workload: 50% Mechatronics and design, 50% Control
Contact: Francesco Stella ([email protected])
Closed-loop Control of Soft Robotic Manipulators (Thesis)
Summary: Developing closed-loop control algorithms for soft robotic manipulators using IMU data. This will leverage our 1m long compliant robot arm that has a large workspace and range of options.
Workload: 80% Control. 20% Hardware
Contact: Francesco Stella ([email protected])
Electrostatic adhesion finger (Thesis)
Summary: Develop the electronics and electrodes to integrate electroadhesion into robot fingers. The project will then explore the characterization of this, and how it can be combined with other mechanical properties (e.g. locking/jamming), and how it can be used to aid control and interactions with objects.
Workload: 50% Electronics, 50% Mechanism design & implementation
Contact: Sudong Lee ([email protected])
Elastic Morphing Wheel to Operate in Extreme Environments (Thesis/Semester Project)
Summary: Design and implement an elastic morphing wheel that improves our GOAT (Great Over All Terrain) robot’s ability to safely operate in challenging natural terrains in extreme environments.
Workload:70% Design and fabrication, 30% Experiments
Contact: Max Polzin ([email protected])
Exploiting Bistability to Operate in Extreme Environments (Thesis/Semester Project)
Summary: Design and implement a mechanism that allows our GOAT (Great Over All Terrain) robot to morph its shape to safely operate in challenging natural terrains in extreme environments.
Workload:70% Design and fabrication, 30% Experiments
Contact: Max Polzin ([email protected])
[closed] Developing distributed tactile sensing on a robot hand (Thesis)
Summary: Ditributed large are tactile sensing is essential for robust manipulation. Starting from our anthropomorphic robot hand, this project will explore the mechatronic integration of tactile sensors receptors into the hand, and investigate how this can be used for sensory motor control.
The project will begin from this custom dexterous hand, and modify the design to integrate hall effect sensors repurposed for tactile sensing. This work will lead to one of the world’s first dexterous hand with integrated distributed sensing.
The student should have a good understanding and intution/experience on:
- Mechanical design using FDM 3D printing
- Electrical design and IC components
- Simple PCB design
- Low level signal processing
Workload: 80% Mechatronics integration, 20% Sensory Motor Control
Contact: Kai Junge ([email protected])
[closed] Cartesian Robots in a wet lab: tracking bacteria growth (Semester)
Summary: To lower the access barrier to lab automation we developed a cartesian robot that can pick and place laboratory labware such as petri dishes and, by using computer vision, can assess how different bacteria colonies grow.
The robot will be deployed in a real wet laboratory at UNIL. The candidate will finish to implement the computer vision program following the needs of the UNIL laboratory and will deploy the robot to study what can be improved software and hardware wise.
Workload: 40% hardware, 60% Software
Contact: Vincenzo Scamarcio ([email protected]) & Francesco Stella (francesco.stella@epfl@ch)
[closed] Wireless Charging System for Autonomous Mobile Platforms (Semester)
Summary: In the framework of the Swiss CAT+ project, we have developed a concept for the transfer of
chemical samples based on a fleet (or swarm) of mobile mini-robots developed locally with ROS. The project aims to develop a charging system for these mini-robots, utilizing wireless charging
technologies, such as inductive coils. The mini-robots would be able to charge their batteries on
several stations situated on key positions on the track.
Workload: 70% Hardware, 30% Software
Contact: Vincenzo Scamarcio ([email protected]) & Edy Mariano ([email protected])
[closed] Robot Laboratory Cleaner (Semester)
Summary: In the framework of the Swiss CAT+ project, we have developed a concept for the transfer of
chemical samples based on a fleet (or swarm) of mobile mini-robots developed locally with ROS. The project aims for the enhancement and integration of our existing mini-robot to create an
autonomous cleaning robot, adept at removing dust on the dedicated track. This enhanced robot
will take advantage of its existing navigation and sensory capabilities, enabling seamless operation
without disrupting the routines of other robots.
Workload: 80% Hardware, 20% Software
Contact: Vincenzo Scamarcio ([email protected]) & Edy Mariano ([email protected])
[closed] Rescue-bot (Semester)
Summary: In the framework of the Swiss CAT+ project, we have developed a concept for the transfer of
chemical samples based on a fleet (or swarm) of mobile mini-robots developed locally with ROS. The project aims for the enhancement and integration of our existing mini-robot to create an
autonomous breakdown-robot, designed to promptly detect and relocate any malfunctioning robots
to a designated safe zone.
Workload: 80% Hardware, 20% Software
Contact: Vincenzo Scamarcio ([email protected]) & Edy Mariano ([email protected])
[closed] Hydrodynamic simulation of a swimming robot (Thesis/Semester)
Summary: Developing a hydrodynamic simulation of a soft swimming robot using commercial software or other.
Workload: 100% Simulation
Contact: Nana Obayashi ([email protected])
[closed] Cartesian Robots in a wet lab: tumors pick & placing & analysis (Semester)
Summary: Working toward the goal of personalized healthcare, we developed a low-cost cartesian robot that can efficiently pick and place mice cancerous tissue explants, by using computer vision and innovative pneumatic grippers.
The robot is ready to be deployed in a real wet laboratory at EPFL to assess its performance. The candidate will study the architecture of the existing robot to propose possible software and hardware changes and will evaluate its performance while executing the tissue explant workflow in a real biological laboratory.
Workload: 30% Hardware, 70% Software
Contact: Vincenzo Scamarcio ([email protected]) & Francesco Stella (francesco.stella@epfl@ch)
Design and manufacturing of a fully-fledged soft manipulator for in-house care (Thesis)
Summary:
In this thesis you will optimize the design of the soft manipulator presented in https://arxiv.org/pdf/2211.10188.pdf , to target real-world applications, such as in-house care. The goal of the thesis is to build a bigger (around 3m long), stronger, yet safe soft manipulator, equipped with embedded sensors and actuation. We look for students passionate about rapid prototyping, CAD and eager to build the new generation of soft robots. Potential publication of results in top Robotics venues.
Workload:80% design optimization and manufacturing, 20% performance evaluation and demonstration
Contact:
Francesco Stella ([email protected])
Understanding human preferences on manipulators in human-robot interaction (Thesis)
Summary:
Robots are still largely confined to controlled environments, far from the human reach. In the last decades the research community put a strong effort to design robots able to interact safely with humans. However, limited study have evaluated the human preference when it comes to close human-robot interactions. In this thesis you will study and compare the human acceptance between traditional rigid robots, collaborative robots, articulated and continuum soft manipulators with real-world tests and user-studies. We search for students eager to answer the question: what kind of robot do we really want around?
Workload: 30% Experiment design, 40% User study, 30% Data analysis.
Contact:
Francesco Stella ([email protected])
Animal behavior to robot design: a methodological framework for computational design of robot structures from animal synergies (Thesis)
Summary:
While biological systems display an incredible diversity in behaviors and motion capabilities, it has been shown that for most tasks, only a subspace of the possible poses is used. We propose to exploit these emerging principles from animal motor control as inspiration to guide robot design. In this thesis you will start by extracting such synergistic motions from animal videos and data-bases. Hence, you will develop a computational design method to translate the emerging synergies into precise robot specifications. Finally, you will transform the simulation results into the design of a fully fledged biomimetic robot. In particular, the thesis will be focused on continuing and optimizing the design, manufacturing and control of a biomimetic cheetah with a reduced set of actuators. Potential publication of results in top Robotics venues.
For reference see link: https://ieeexplore.ieee.org/stamp/stamp.jsp?arnumber=8373731
Workload:
80% design optimization and manufacturing, 20% performance evaluation and demonstration
Contact:
Francesco Stella ([email protected])
Setting a robot fleet control system for the Swiss CAT+ chemical sample transfer system (Thesis/Semester)
Summary:
In the framework of the Swiss CAT+ project, we have developed a concept for the transfer of chemical samples based on a fleet (or swarm) of mobile mini-robots developed locally and designed around the typical shape of the sample. For localization, they are equipped with LIDAR IMU and wheel encoders. We plan to have about 10 of these mini-robots running in a track suspended above the scientific instruments. The track and the robots already physically exist. We also already implemented the ROS Navigation Stack. The transfer between the scientific instruments and the mini-robots in their track will be handled by 6-axis cobots (Universal Robots 5e or 10e) assisted by a set of industrial cameras for precise positioning. Each 6-axis cobot will be considered as a station. The fleet of mobile mini-robots will be controlled within the track via the ROS framework by the laboratory scheduler and should be autonomous to systematically assign a free mini-robot to a requested station or to deliver a sample.
OSS. Previous ROS knowledge is highly desirable
Deliverables:
- a. To make a scientific literature review for fleet control
- b. To develop, within the framework of the ROS, a complete control system for a fleet of 10 mobile
- mini-robots, 10 induction charging bases and 5 Universal Robots stations.
- c. To establish a full simulation (ideally in Gazebo) based on the existing track form using the
- control software developed in b.
- d. If time permits, start the actual implementation of the developed control system in the Swiss
- CAT+ environment.
Contact:
Vincenzo Scamarcio ([email protected])
Developing a complete solution for robotic chemical commercial bottles manipulations (Thesis)
Summary:
In the Swiss CAT+ project, we are developing a robotic module to standardise chemical solids from different types of commercial bottles up to 2 kg into homogeneously shaped 20 ml screw-capped plastic containers. The first step in this standardisation is the gripping of all commercial chemical bottles by a 6-axis cobot (type Universal Robot UR3e or UR5e). These bottles can have various shapes (cylindrical, round, square) and materials (glass, hard plastic, soft plastic such as PET) and weights ranging from 10 g to 2 kg depending on the density of the chemical product. Once the bottles have been seized, they must be kept stable and secured for subsequent operations such as pouring the contents into a standard container or allowing a sampler to enter the bottle and take a chemical sample.
Deliverables:
- a. To review the scientific literature in the field of robotic safe gripping of variable shapes and
- materials.
- b. To review the existing solutions available on the market.
- c. Select and acquire the most suitable tool.
- d. If no convincing solution exists, design and develop a suitable prototype gripper.
- e. Program the 6-axis UR cobot to work with the chosen gripper.
- f. Validate through a series of reproducibility tests with different commercial bottles, the quality of
- the gripping (systematicity, stability in case of robot movements with different accelerations…).
Contact:
Vincenzo Scamarcio ([email protected])
[closed] Cartesian Robots in a wet lab: dip and spray (Semester)
Summary:
The limit of what is achievable in a laboratory experiment is frequently defined by the researcher’s willingness to spend time on a repetitive task. Robots are more efficient than humans in this area, therefore, we want to modify two different cartesian robots to create layer-by-layer films. The first robot will perform the ‘dipping method’ (lab-scale substrates, up to 20 layers) (Already done in this semester) the latter will automate the ‘spray method’ (up to 200 layers) (To be done in this semester, focus of the project). The final objective is to find the optimal parameters to improve the film thickness error, found by using some characterization techniques
Workload (split of type of work):
- 40% Hardware design and construction
- 40% Control of system
- 20% Characterization + Optimization
Contact:
Vincenzo Scamarcio ([email protected])
How well can a robot handshake? (Thesis x2 students most likely)
Summary:
The project is to investigate, to what extent can a robot fool a human in a handshaking task; i.e.: a Turing test for robotic handshaking. There are many layers and directions to this project, and the specific details of the project will be discussed based on the student’s interests expertise. Here are some directions.
– Make a bio-inspired passive hand. By covering it with multiple layers (thin gloves, ski gloves, etc), at what point will humans be able to not detect the hand is a robot or human?
– How can we understand (and replicate in the future) human-human handshaking? With a passive hand with a large array of tactile sensors, can we obtain “sensor synergies” from the handshaking motion?
– What does the passive stiffness of the wrist play a role to convey the “human-ness” in hand-shaking tasks?
– If we add active tendons (motorise some aspects of the hand), to what extent does twitching or slight gripping convey the “human-ness” in the hand-shaking task?
Workload:
– Fabrication of hand/sensors: 60%
– Developing test methods and experimental protocols for human tests: 10%
– Conducting the aforementioned experiments: 30%
Contact:
Kai ([email protected])
Sensorizing the environment – Developing physical twins for robotic manipulation (Thesis)
Summary:
Robotic manipulation at its heart is the interaction between the robot and the environment. To assess the quality of manipulation and train robotic manipulators in real life, a sensorized “object” which can “feel” how the robot interacts with it can be a useful tool. This project aims to lay the groundwork on creating sensorized “objects” with abilities (including but not limited to) such as: localization of contact, detection of forces, orientation and acceleration measurement, etc. Specific tasks of what this environment will be is to be discussed. Current ideas include a “cube” which the robot can manipulate in-hand and handling of tools such as kitchen tools.
Some links for related technologies:
https://arxiv.org/pdf/1803.00628.pdf
https://ieeexplore.ieee.org/stamp/stamp.jsp?arnumber=9762135
https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=9706272
The project requires a multidisciplinary skillest – mechanical design, fabrication, microcontrollers, coding and analysis.
Workload:
– Exploration of technologies to develop the physical twin: 40%
– Developing and (some)characterisation of the twin: 60%
Contact:
Kai ([email protected])
(Closed) Tactile Sensor development (Thesis/Semester)
Summary:
Sensing technologies are essential to develop intelligent robots that can interact and respond to the environment. Commercial sensors usual are engineered well to have reliable, repeatable, and often precise measurements, but can be difficult to integrate into novel hardware as they are constrained by their geometry or other properties set by the manufacturer. In this project, there are two directions.
One is to investigate and explore a variety of sensing technologies which can be developed in house, mostly focusing on tactile sensing. This is an exploratory project, with the aim for the student to try different technologies to see their feasibilities and pros/cons for future robotic implementation. Some starting points include: EIT tactile skins, hydrogel tactile skin, re-implementation of ReSkin (tactile sensing through Hall effect sensors), developing conductive silicone, and combinations of the aforementioned.
Another is to apply existing (or possibly new) tactile sensing technologies explored in the lab to apply them on robotic hands. This would include a lot of trial and error in prototyping the correct shape and manufacturing technique for the application, but also ensuring stability and simplicity in the design such that the sensor can robustly function while the robot is in operation. Design of PCB modules to read the sensors is also another necessary step, although not the priority.
Prior experience with mechatronics prototyping is recommended but not strictly necessary.
Workload:
– Exploration of options “out there”: 20%
– Testing and prototyping different sensors: 60%
– Combining (or rejecting) certain sensors to finalise on a design: 20%
Contact:
Kai ([email protected])
(Closed) RoboCup @Home MAKE Project (Semester)
Summary:
RoboCup @Home is a MAKE Project where we aim to build a home service robot to participate in the international robotics competition: RoboCup. The aim of this project is to work on the software systems of the robot. Software tasks will be around navigation and behavioural tree of the robot.
In both cases, the student should have some level prior experience in relevant fields, as the project requires practical knowledge to integrate state of the art technologies. Specific project directions will be discussed with each student based on their interest and past experience.
Workload:
– 80% technical development / robotic integration
– 20% decision making and planning of the project with other team members
Contact:
Kai ([email protected])
Worming up: Ascending a taut tether with a soft robot to capture atmospheric measurements
Summary:
A kite can be used to capture atmospheric measurements for environmental monitoring. It is of interest to capture data along its tether. Despite their simple design cable stockings can hold large loads. In our lab, we are building tendon-driven soft robot structures which can deform under load and are actuated. These soft robots follow a similar design pattern to cable stockings. The goal of this project is to modify our soft robots to ascend on a taut tether. The robot will then be evaluated in comparison to a conventional wheel based robotic line ascender. The student should have prior experience in 3D printing and rapid prototyping.
Workload:
– 15% literature review
– 30% design of soft robotic line ascender
– 35% fabrication of soft robotic line ascender
– 20% evaluation of soft robotic line ascender
Contact:
Max Polzin ([email protected])
Towards Spider-Robot
Summary:
Aerial robots have advantageous locomotion in free space and do not require to interact with their environment while moving. However, this freedom of motion comes at a reduced locomotion efficiency (with typical flight times in the range of minutes). Ground vehicles on the other side are continuously interacting with their environment requiring advanced perception and controllers to move stable. In this project, we explore hybrid locomotion of a tethered robot which exploits swinging dynamics to preserve energy while moving and limited interactions with its environment, e.g. when forming new attachments. The student should have prior experience in rapid, mechanical prototyping and fabrication.
Workload:
– 10 % literature review
– 20 % narrowing down scenario
– 35% prototype concepts
– 35% evaluation of implemented concepts
Contact:
Max Polzin ([email protected])
Design of a power system for tethered robots
Summary:
In our lab, we are developing robots that are intended to operate in extremely harsh conditions, e.g. on glaciers, caves or tropical forests, where conventional operation modes (connectivity, power, locomotion) face severe drawbacks. Virtually all robots are tethered at one point in their life, be it for debugging or extended duration experiments. Thus tethers are vital and therefore our robot systems are continuously connected through tethers by design. A tether can provide communication, power and safety. The student will design a tether management system which meets these criteria. The tether management system will be deployed to a dangling, rappelling robot intended to explore subglacial cavities. The student should have prior experience with power electronics, communication links and mechanical design.
Workload:
– 30 % research on available components and component selection, e.g. power, communication
– 40% design of sensorized, actuated winch mechanism
– 30% characterization and evaluation of mechanism
Contact:
Max Polzin ([email protected])
Anchor point estimation for actuated, dangling robots
Summary:
A tethered, rappelling bicopter can be used to explore unknown, complex environments e.g. glacial crevasses or tree canopies. Its tether can provide a communication link, power and safety. Depending on its past trajectory the tether can form intermediate anchor points in the environment. These anchor points influence the dynamic behaviour of the robot. From the observed dynamic behaviour of the robot, i.e. its swinging motion, we can estimate the location of the last intermediate anchor point. With an estimate of the last intermediate anchor point, it is feasible to plan a trajectory to successfully detach from said anchor point. The student will develop a simple simulation to capture the described dynamics of the system. Further, the student develops an algorithm to estimate the tether length below the last anchor point for our tethered bicopter. The develop algorithm is evaluated in simulation and on the real robot.
Workload:
– 30% develop simulation
– 40% develop/test algorithm in simulation
– 30% implement algorithm on real system
Contact:
Max Polzin ([email protected])
Learning ROS with ROSbloX
Summary:
The Robot Operating System (ROS2) is becoming the de facto standard in programming complex robotic systems. However, getting started with ROS (in Python or CPlusPlus) can be challenging and overwhelming, particularly when starting with no prior knowledge and learning self-paced. In our Lab, we have developed ROSbloX to ease the entrance into the ROS world for students with no prior knowledge in ROS. In this project, the student will evaluate the quality of our available ROSbloX, e.g. for Lidars, cameras, GNSS systems, IMUs. Further, the student will define metrics to assess how ROSbloX simplify the introduction of novel students to ROS. Prior knowledge of ROS2, Docker, Linux, Single Board Computers is of advantage. You get the chance to take over responsibility for an open source project and to continuously contribute to its future development.
Workload:
– 20% understand problems faced by students when working with ROS
– 15% familiarise with existing ROSbloX
– 25% define metrics to assess qualtiy of ROSbloX
– 25% data collection through survey to apply developed metrics
– 15% improve/advance idea behind ROSbloX
Contact:
Max Polzin ([email protected])
Advanced control of a rappelling, tethered bicopter
Summary:
Tethering robots can be advantageous in numerous scenarios. A tether can provide a reliable, high-bandwidth communication link, safety and power. A rappelling, tethered bicopter has been designed to retrieve ice samples in a glacier. The platform is self-stabilising. However, depending on the flown path, the stabilisation can be sped-up by developing and implementing novel control algorithms. The student will analyse the system and implement a simulation to capture the observed behaviour. Afterwards, the student will come up with novel control strategies to stabilise the robot faster. The control strategies are evaluated in simulation and on the real robot.
Workload:
– 25% understanding dynamics of the system
– 25% implementing simulation to capture system dynamics
– 25% developing novel control algorithms
– 25% implementing novel control algorithms in simulation and on real robot
Contact:
Max Polzin ([email protected])
Visual data logging in field robotics
Summary:
Many field robots are equipped with either stereo or monocular cameras. Often processing their image streams (rectifying, running machine learning inference, logging) poses the highest load on a robot’s onboard computer. The bandwidth of onboard computers is usually limited and enough resources must be available for mission-critical tasks. In this project, several image processing pipelines are implemented and benchmarked to select an optimal pipeline to log visual data (either onboard or remote). The image processing pipelines of particular interest are Nvidia’s hardware accelerated NITROS image processing pipeline, the default CPU-only ROS2 image processing pipeline, and finally the ZED Stereo camera’s pipeline implemented in the ZED camera’s SDK. The student should have prior experience working with ROS2, Docker, Linux, Single Board Computers (ideally Nvidia Jetson).
Workload:
– 20% selection of (feasible) image processing pipelines
– 40% implementation of image processing/logging pipelines
– 40% implementation of benchmarking metrics
Contact:
Max Polzin ([email protected])
Environmental Sensing with a Soft Manipulator on a Robotic Line Ascender
Summary:
Biodiversity is a measure of our ecosystem’s health. Particularly in mountainous regions, the migration of low-altitude species to higher altitudes is an indicator of the speed of a changing climate. Monitoring biodiversity, particularly studying smaller species, e.g. insects, and plants is meticulous work. Robots provide a means to automate these tasks partially. However, the turbulence of thrusters prevents the application of uncrewed aerial vehicles. In this project, the student builds up on previous work in our lab to expand our tethered robot platform with a soft manipulator such that it can measure biodiversity in our backyard. This is a robotics project. It involves designing the hardware, programming and testing it.
Workload:
– 20% Exploring available concepts
– 30% Hardware design and implementation
– 30% Software and control algorithm design and implementation
– 20% Experiments
Contact:
Max Polzin ([email protected])
[closed] Optimal stiffening of a fish tail (Thesis preferred)
Summary:
Being able to actively control the stiffness of a soft structure will allow us to build more capable soft robots, in particular for bioinspired underwater robots that harvest maneuvering energy from the fluid environment. We have previously created “pouches” that we can insert into silicone structures that can stiffen them in different ways. The goal of the project would be to find the best design for these pouches so we can efficiently stiffen or soften a fishtail on demand. The tail should be implemented on robotic hardware for testing the capabilities.
Workload:
– Design and fabrication: 40%
– Analysis and characterization of stiffening: 60%
Contact:
Nana Obayashi ([email protected])
[closed] Design and sensorization of a robotic sea turtle (Thesis/Semester)
Summary:
Development of sensory and control systems for an underwater swimming sea-turtle robot. This includes imaging, water quality and other sensory feedback. We will also explore how we can use this information to enable autonomous exploration.
Workload:
75% experimental (design, fabrication, experimental testing), 25% control/simulation
Contact:
Nana Obayashi ([email protected])
[closed] Evolutionary and regenerative exploration of falling paper morphology (Thesis/Semester)
Summary: Robotic investigation of how passive structure shapes or morphology (such as helicopter seeds) came to be. We will look into evolutionary and regenerative algorithms to reverse engineer how these structures were optimized by nature. Large scale robotic experimentation will also be used.
Workload:
50% experimental (design, fabrication, experimental testing), 50% optimization, learning, algorithm development
Contact:
Nana Obayashi ([email protected])
[closed] Robotic art in the fluid environment (Thesis/Semester)
Summary:
Is there a way to emulate emotion using robots in the fluid environment? An example (although not in fluids) would be to investigate reactions from robotic arm by changing the impedance of the arm based on human pose in dancing. This is an exploratory project idea. Please contact if you are interested!
Workload:
10% Literature review, 50% experimental (design, fabrication, experimental testing), 40% optimization, learning, algorithm development
Contact:
Nana Obayashi ([email protected])
[closed] Robotic phenotyping using Farmbot for co-optimization of crop environmental impact and nutritional value (Thesis)
Summary:
Climate change, ever-increasing population and imbalanced dietary requirements poses a significant challenge for conventional crops and agricultural methods.The aim of the project is to set up the cartesian Farmbot as robotic phenotyping system and develop full physical automation of seeding, environmental control, harvesting and the assessment of the nutritional value of the crops using the cartesian ‘farm bot’. The data generated will be used to have efficient growing methods.
The project requires multidisciplinary skills – mechanical design, fabrication, microcontrollers, coding and data analysis.
Workload:
30% Setup hardware for data acquisition
40% Software algorithms and sensor calibration
30% Data analysis
Contact:
Shiv Katiyar ([email protected])
[closed] Robotic platform for investigation of flocculation in beverages (Thesis/Semester)
Summary:
During the beverage formulation process it is often investigated how developed food product (e.g. coffee) interacts with other beverages like milk. With variation in beverages (e.g. dairy or plant based milk) or even in their formulation, significantly different behaviour in terms of colour, flocculation, sedimentation or foaming of the resulting mixture is detected. Acquired information is used for the objective assessment of the resulting mixture but more importantly as a metric for the further optimization of the constituent ingredients (milk, coffee etc.).
Goal of this project is to develop a robotic system which is able to repeatedly combine two manually prepared beverages, mix them if necessary and keep the temperature constant. Resulting beverage will be then assessed using computer vision methods primarily for the flocculation and phase separation. Assessment of sedimentation, foaming, color or other relevant metric will be explored if possible.
The robot design will be based on the frame of the 3D printer and with the gripper which needs to be designed, such system can repeatability and reliably perform pick, place, pour and mix tasks. Integration of other necessary equipment (e.g. temperature control or camera) has to be done within this constrained environment.
There are no requirements considering computer vision methods, but it is preferred that assessment should be performed using Python and preferably OpenCV library, but other suggestions are most welcome.
Workload:
– 40% design and building of robotic system
– 60% implementation of image processing pipelines
Contact:
Stefan Ilic ([email protected])
Robotic Simulation Toolkit for Education (Thesis/Semester)
Summary:
Educational Robotics helps students of all ages familiarise and expand their knowledge of robotics and programming. while learning other cognitive skills.Given the physical form of the robot and its control system, it is particularly promising to make robotic systems adaptable to tasks and the environment. This project will aim to use robotic simulation for morphology and computational thinking education.
https://gears.aposteriori.com.sg/
Workload:
- 20% Explore education robotic elements
- 30% Design learning activities
- 50% Experiment and analysis data
Contact person: Alan Wu ([email protected])
Robotic Education with AI guidance (Thesis/Semester)
Summary:
Educational Robotics helps students of all ages familiarise and expand their knowledge of robotics and programming. while learning other cognitive skills. This project will aim to use AI to give guidance and suggestions to students instead of human instructors. The task for experiment subjects will be building a robotic gripper. The AI can give advice to experiment subjects when they are facing problems. We compare the learning performance between human assistants and AI assistance.
Workload:
- 20% Explore learning outcome evaluation methods
- 30% Refine learning activities and define evaluation process
- 50% Experiment and analysis data
Contact person: Alan Wu ([email protected])
Animal behavior to robot design: a methodological framework for computational design of robot structures from animal synergies
Summary: While biological systems display an incredible diversity in behaviors and motion capabilities, it has been shown that for most tasks, only a subspace of the possible poses is used. We propose to exploit these emerging principles from animal motor control as inspiration to guide robot design. In this thesis you will start by extracting such synergistic motions from animal videos and data-bases. Hence, you will develop a computational design method to translate the emerging synergies into precise robot specifications. Finally, you will transform the simulation results into the design of a fully fledged biomimetic robot. In particular, the thesis will be focused on the design, manufacturing and control of a biomimetic cheetah with a reduced set of actuators. Potential publication of results in top Robotics venues.
For reference see link: https://ieeexplore.ieee.org/stamp/stamp.jsp?arnumber=8373731
Workload:
- 10% Extraction of existing synergies from videos and open-source databases of animal motion (Computer vision, Inverse Kinematic and order-reduction methods)
- 10% Development of a computational method for mechanical design specifications (Evolutionary algorithms)
- 80% Design and testing of a cheetah robot (Mechatronic design)
Contact person: Francesco Stella
IMUblock: A modular and ready-to-go solution to the pose estimation problem of soft robots
Summary: Due to the inherent compliance, soft robots are able to deform in infinite degrees of freedom. Moreover, the limited availability of physically compatible sensors, makes the shape estimation of soft robotic systems extremely challenging. In this project you will develop the modular and scalable solution – IMUblock – to this problem by leveraging IMU technology and discretized models of soft robots. The IMUblock will then be evaluated experimentally on a growing, extendable continuum soft manipulator. Potential publication of results in top Robotics venues.
For reference see link: https://link.springer.com/chapter/10.1007/978-3-030-71151-1_48
Workload:
- 50% Design of a modular, wireless IMU sensor (Rapid Prototyping, Electronic design)
- 20% Embed a filter based on reduced orders of soft robots (PCC) in the IMUblock (C++, Python, ROS)
- 30% Test the novel sensor solution on existing soft manipulators.
Contact person: Francesco Stella, Max Polzin
Soft Robotic Toolkit for Education
Summary: Educational Robotics helps students of all ages familiarize and expand their knowledge of robotics and programming. while learning other cognitive skills. There are many modular educational robots in the market but there is a missing piece, soft component. The aim of this project is to develop a toolkit with several soft components such as soft actuators.
Workload:
- 20% Explore soft robotic elements
- 30% Design several modular soft robotic components
- 30% Manufacture
- 20% Testing
Contact person: Yi-Shiun Wu
Cartesian Robot with custom gripper and computer vision
Summary: Laboratories are ripe for automation as they are semi-structured. Cartesian robots offer precision motions, yet typically rigid end effectors are used. By combining a cartesian robot with a compliant gripper and computer vision and modular equipment, we want to explore the complexity of tasks that can be accomplished.
Workload:
- 40% Hardware design and construction
- 20% Interfacing electronics
- 40% Control of system and computer vision
Contact person: Stefan Ilic, Vincenzo Scamarcio
Cartesian Robots in a wet lab: dip and spray
Summary: The limit of what is achievable in a laboratory experiment is frequently defined by the researcher’s willingness to spend time on a repetitive task. Robots are more efficient than humans in this area, therefore, we want to modify two different cartesian robots to create layer-by-layer films. The first robot will perform the ‘dipping method’ (lab-scale substrates, up to 20 layers) the latter will automate the ‘spray method’ (up to 200 layers). The final objective is to find the optimal parameters to improve the film thickness error, found by using some characterization techniques.
Workload:
- 40% Hardware design and construction
- 40% Control of system
- 20% Characterization + Optimization
Contact person: Vincenzo Scamarcio
Fabrication and characterization of a variable stiffness soft structure
Summary: Being able to actively control the stiffness of a soft structure will allow us to build more capable soft robots, in particular for bioinspired underwater robots that harvest maneuvering energy from the fluid environment. In this project, you will explore techniques that are used to achieve variable stiffness for soft silicone structures, such as an underwater soft tentacle. The aim for this project is to investigate mechanisms for high stiffness variation, characterizing the structural behavior, and if successful, implement on robotic hardware for maneuverability demonstrations.
Related references:
- https://link.springer.com/chapter/10.1007/978-3-030-25332-5_6
- https://www.liebertpub.com/doi/full/10.1089/soro.2019.0034
Workload: 20% mechanical design, 50% design iteration, exploration, and fabrication, 30% prototyping with microcontrollers
Contact person: Nana Obayashi
Exploration of emergent limit cycles of floating objects in water
Summary: To design better robots that exploit the fluidic environment such as water, it is important to study the bio-inspired interactions between morphologies. Non-contact manipulation is seen in nature, for example in tool usages by marine animals. This project involves the development of an experimental setup for manipulating objects in water using soft structures and exploring the emergent behaviors of these objects. It was previously seen that certain “limit cycles” can be observed from non-contact manipulation of floating objects using a structure similar to a soft fin. This will be a highly exploratory project on characterizing the emergent limit cycles to help us understand how we can design robots that exploit the fluid environment for a given task.
Related references:
Workload: 20% mechanical design, 60% design iteration, exploration, and fabrication, 20% prototyping with microcontrollers
Contact person: Nana Obayashi
Robotic phenotyping for co-optimization of crop environmental impact and nutritional value
Summary: Food production and agriculture are facing enormous challenges due to factors such as climate change, ever-increasing population and imbalanced dietary requirements. This poses a significant challenge for conventional crops and agricultural methods. Agri-robotics opens the potential for mass direct in-field phenotyping of crops under true farm conditions. The aim of the project is to set up the cartesian farmbot as a robotic phenotyping system and develop full physical automation of seeding, environmental control, harvesting and the assessment of the nutritional value of the crops using the cartesian ‘farm bot’.
The project requires multidisciplinary skills – mechanical design, fabrication, microcontrollers, coding and data analysis.
Workload:
- 30% Setup hardware for data acquisition
- 40% Software algorithms and sensor calibration
- 30% Data analysis
Contact person: Shiv Katiyar
Topographic terrAin Modeling for Agricultural Robots (TAMAR)
Type: Semester Project
Summary: Robust rough terrain navigation of uncrewed ground vehicles enables their usage for novel agricultural applications, especially in environments where the usage of traditional farming machinery is impossible, e.g. autonomous harvesting in steep vineyards or orchards. However, testing uncrewed ground vehicles (UGV) on natural slopes is a cumbersome and potentially dangerous task. In this project, a simulation of the slopes of a Swiss vineyard is developed to evaluate novel designs for agricultural robots. The simulation a) imports topological information provided by the Swiss Federal Office of Topography and b) includes a data-driven traction model for UGVs maneuvering on steep terrain. The accuracy of the developed simulation is validated experimentally.
Keywords: Terrain simulation, data-driven modeling, mapping
Workload: 15% literature research, 30% experiments, 55% simulation development
Contact Person: Max Polzin
Topologically constrained planning for robots operating in precipitous environments (TOP-ROPE)
Type: Semester Project / Master Thesis
Summary: Tethered rappelling uncrewed ground vehicles (UGV) have potential applications in future agricultural systems, especially where the terrain prevents the usage of traditional systems, e.g. autonomous harvesting in steep vineyards or orchards. While a tether connected to a UGV expands its operating area to steep slopes, it imposes additional constraints when planning feasible paths for said UGV. In this project, novel path planning algorithms which consider the constraints imposed by a tether connected to a UGV are developed.
Keywords: Path planning, robotic navigation
Workload: 20% literature research, 35% simulation experiments, 45% thinking
Contact Person: Max Polzin
Anchor deployment and Collection for Tethered Robots Exploring Steep Slopes (ACTRESS)
Type: Semester Project / Master Thesis
Summary: Uncrewed ground vehicles (UGV) have potential applications in future agricultural systems, e.g. automatic harvesting, phenotyping, weed control and pest management. Agricultural terrain is generally challenging to maneuver in, especially when driving on slopes such as in steep vineyards and orchards. A UGV can be equipped with a winch and tether to a) expand its maneuverable space and b) to improve its recovery capabilities from catastrophic failures. The maneuverable space of a UGV which is connected to an anchor point by a tether differs from the maneuverable space of an untethered one. In this project a dynamic anchoring system is developed to be deployed and retracted autonomously by a UGV, to maximize its maneuvering capabilities.
Keywords: Mechatronics prototyping
Workload: 10% literature research, 50% mechanical design, 40% experiments
Contact Person: Max Polzin
Automated Robot Testing In Steep Terrain (ARTIST)
Type: Semester Project / Master Thesis
Summary: Improving the maneuverability of uncrewed ground vehicles (UGV) on natural slopes enables novel applications of UGVs in agriculture, e.g. autonomous harvesting in vineyards or orchards. However, testing UGVs and novel algorithms on natural slopes is a cumbersome and potentially dangerous task. Thus, a platform to simulate driving on changing slopes with different surface textures is developed. The platform alters the direction of the gravitational force acting on the systems under test. Altering the direction of the gravitational force requires lifting and pulling respectively pushing the systems under test with a constant force. In this project, a system is designed and implemented to exert a varying force on a UGV.
Keywords: Dynamic systems, motor control
Workload: 35% system design, 40% experiments, 25% control
Contact Person: Max Polzin
Fabrication and characterisation of a soft sensorized fingertip
Type: Semester Project
Summary: Tactile sensing is key to achieving robust dexterous manipulation when using robot hands. Previous methods of tactile sensing include using cameras to measure the deformation of soft material and attaching integrated PCB electronics on fingertip. In this project, you will explore methods of using 3D printable soft conductive filament to manufacture a fingertip sensor which can be used directly from the print. The aim for this project is to investigate different morphologies of 3D printed sensors (provided with a few starting points), measure/understand their response, and if successful implement it on a robot finger.
Keywords: Soft sensors, mechatronics prototyping
Workload: 15% mechanical design, 50% design iteration, exploration, and fabrication, 30% electronics
Contact Person: Kai Junge
Topology optimization for soft electronic skins
Type: Semester Project
Summary: Soft electronic skins (E-skins) capable of tactile pressure sensing have the potential to endow robotic systems with many of the same somatosensory properties of natural human skin. In this project, you will first develop computational methods to optimize the relation between topology and sensitivity for a grid of soft pressure sensors. Hence, the simulation results will be brought to real life, evaluating manufacturing possibilities and limitations arising from 3D printing and casting techniques. Finally, the design performance will be evaluated on a specific application such as safe human-robot interaction, dexterous manipulation, or guided rehabilitation.
Keywords: Soft sensors, optimal design, mechatronics prototyping
Workload: 60% simulation and optimization , 30% system design and experiments, 10% proof of concept application
Contact Person: Francesco Stella
Low-cost, sensorized, finger prosthetics for developing countries
Type: Semester Project
Summary: The World Health Organization estimates that, in the developing world, there are 40 million amputees, and only 5% of them have access to any form of prosthetic care. Several initiatives, by academic and non-profit organizations community, have already tried to leverage rapid prototyping techniques to propose a solution to this problem. In this project you will contribute to this collective knowledge, developing a parametric design of a finger prosthetic with embedded tactile sensors that can be quickly personalized and 3d-printed. The design will then be quantitatively tested and validated. Finally, if the design process is successful, the design will be sent and evaluated by amputees in Mali.
For reference: Limbs International, “Why Limbs,” [Online]. Available: https://www.limbsinternational.org/why-limbs.php. 2015.
Keywords: Prosthetics, embedded sensors, prototyping
Workload: 80% design , 20% experimental validation
Contact Person: Francesco Stella
IMU sensor fusion for soft robotics
Type: Semester Project / Master Thesis
Summary: Due to the inherent compliance, soft robots are able to deform in infinite degrees of freedom. Moreover, the limited availability of physically compatible sensors, makes the shape estimation of soft robotic systems extremely challenging. In this project you will combine discretized models of soft robots, such as the constant curvature model, with state of the art sensor fusion algorithms. The algorithm will then be evaluated experimentally on a growing, extendable 3D printed continuum body structure with embedded IMUs.
For reference, see link.
Keywords: Soft robotics, Kalman filtering, IMUs
Workload: 80% algorithm design , 20% experimental validation
Contact Person: Francesco Stella
Control optimization and steering of underwater swimmers
Type: Semester Project
Summary: There are several simple soft underwater swimmer platforms that are of interest. One focus of the project will be the optimization of actuation control for the underwater swimmers. We will also investigate different methods of controlling the trajectory of the swimmer (eg. drag-based, differential thrust, etc) and explore how we can use this to enable autonomous exploration.
Keywords: Soft robotics, optimization, control, computer vision, electronics
Workload: 60% control/simulation, 40% experimental (design, fabrication, experimental testing)
Contact Person: Nana Obayashi
Underwater object manipulation with air bubbles
Type: Semester Project / Master Thesis
Summary: Development of experimental setup for manipulating objects/debris underwater leveraging air bubbles or soft structures. We take inspiration from sea creatures, such as dolphins and whales that use “bubble nets” to capture prey. We will also investigate methods for simulating these complex solid-fluid interactions.
Keywords: Manipulation, computer vision, prototyping, electronics, sensing, control, simulation
Workload: 75% experimental (design, fabrication, experimental testing), 25% control/simulation
Contact Person: Nana Obayashi
Agricultural Robotics: Robotic optimization of plant growing conditions
Type: Semester Project / Master Thesis
Summary: Using a cartesian robot (farmbot) we want to develop feedback control based on computer vision to assess plant growth and optimize conditions through running robotic growing experiments. Can we make plants grow faster, and can be predict their performance from early stage growth?
Keywords: Feedback control, optimization, agricultural robotics, computer vision
Workload: 75% experimental (design, fabrication, experimental testing), 25% control/simulation
Contact Person: Shiv Katiyar
‘Robotic Scientist’ Intelligent automation of experimental analysis (titration)
Type: Semester Project / Master Thesis
Summary: Develop the hardware, control and computer vision to intelligently automate titration experiments. Many experiments require the use of burette to perform titration, where the colour change is used to indicate when the experiment should be terminated. Currently this is highly manual and there are significant problems with repeatability and reliability. Automating this process will be highly impactful, and also enable more intelligent methods to be explored.
Keywords: Mechatronics prototyping, computer vision, control
Workload: 60% design and implementation , 20% computer vision, 20% control
Contact Person: Stefan Ilic
Mechanism for Growing Robots
Type: Master Thesis
Summary: Biological systems show a significant ability to change and alter their structure through growth. A number of mechanisms for growth have been developed for robotic structures. Here, we want to develop mechanisms that allow for plant-inspired growth – i.e. structures that can ‘grow’ and subdivide, to allow us to create large scale structures through growth.
Keywords: Mechatronics prototyping, control
Workload: 80% design and implementation , 20% control
Contact Person: Shiv Katiyar
Design and fabrication of sensorized bioinspired robots hands (Semester/Full Masters Project)
Summary: Starting for biological inspiration, use novel 3D printing technologies and casting to rapid fabricate robotic hands with incorporated soft sensors. Investigate the design optimization of the sensor placement, and utilize multi-body, multi-material FEA based simulators to optimize control.
Keywords: Bio-inspired robotics, soft sensors, control, design optimization.
Workload: 75% experimental (design, fabrication, experimental testing), 25% control/simulation
Agricultural Robotics: Robotic optimization of plant growing conditions (Semester/Full Masters Project)
Summary: Using a cartesian robot (farmbot) we want to develop feedback control based on computer vision to assess plant growth and optimize conditions through running robotic growing experiments. Can we make plants grow faster, and can be predict their performance from early stage growth?
Keywords: Feedback control, optimization, agricultural robotics, computer vision
Workload: 75% experimental (design, fabrication, experimental testing), 25% control/simulation
Optimization of Robotic Sea Turtle Flipper (Morphology and Control) (Semester/Full Masters Project)
Summary: The development of soft swimming robots is particularly challenging due to the interactions of the soft body with the fluid. Here, we want to leverage modelling techniques and data-driven methods to optimize the design of the flippers for a sea-turtle and also the controllers.
Keywords: Manipulation, computer vision, sensing, feedback, optimization, learning
Workload: 75% experimental (design, fabrication, experimental testing), 25% control/simulation
Sensorization of a Robotic Sea Turtle (Semester/Full Masters Project)
Summary: Development of sensory and control systems for an underwater swimming sea-turtle robot. This includes imaging, water quality and other sensory feedback. We will also explore how we can use this information to enable autonomous exploration.
Keywords: Sensing, control, computer vision, electronics.
Workload: 75% experimental (design, fabrication, experimental testing), 25% control/simulation
Evolutionary Design of Soft Sensors (Semester/Full Masters Project)
Summary: The design of soft sensors for tactile perception significantly affects their performance. Using new fabrication techniques for soft sensors, we will develop evolutionary approaches to optimize the design for different tasks.
Keywords: Sensing, control, optimization, 3D printing, fabrication
Workload: 50% experimental (design, fabrication, experimental testing), 50% optimization, learning, algorithm development
Wearable Sensorized Gloves (Semester/Full Masters Project)
Summary: utilizing our novel fluidic soft sensors and knitted sensorized sensors, develop gloves which perform on-board real-time sensor processing. In addition incorporate activ efunctionality – e.g. control adhesion, or actuation
Keywords: Sensing, control, optimization, fabrication
Workload: 75% experimental (design, fabrication, experimental testing), 25% optimization, learning, algorithm development