









Summary
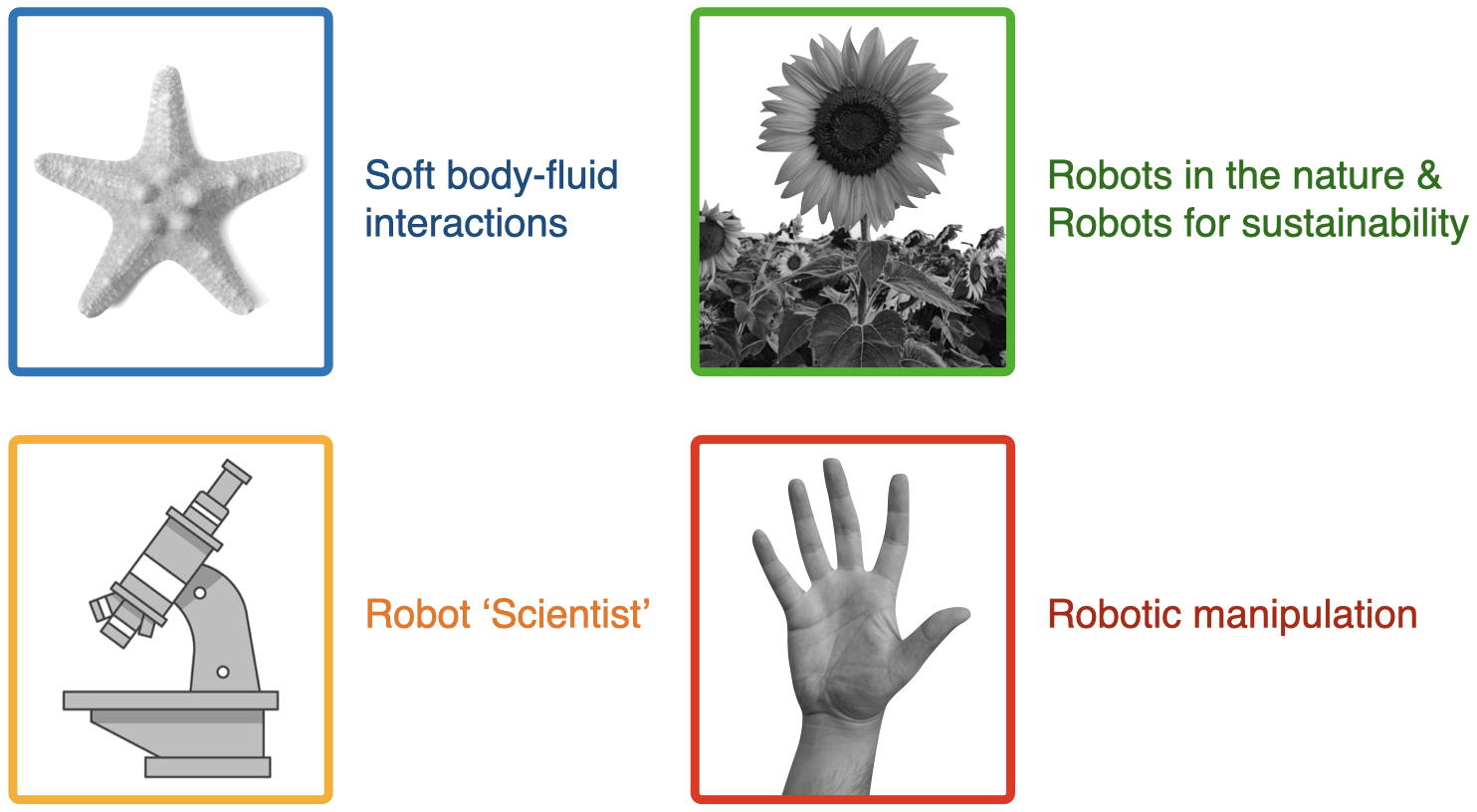
At the CREATE Lab, we look at a how to design better robots for the future in a variety of applications and scenarios. In particular, we are interested in how to design the ‘body’ of the robot, and how it can be most effectively used (soft robotics being a big theme). Largely our projects can be associated to four (or a combinations of) directions.
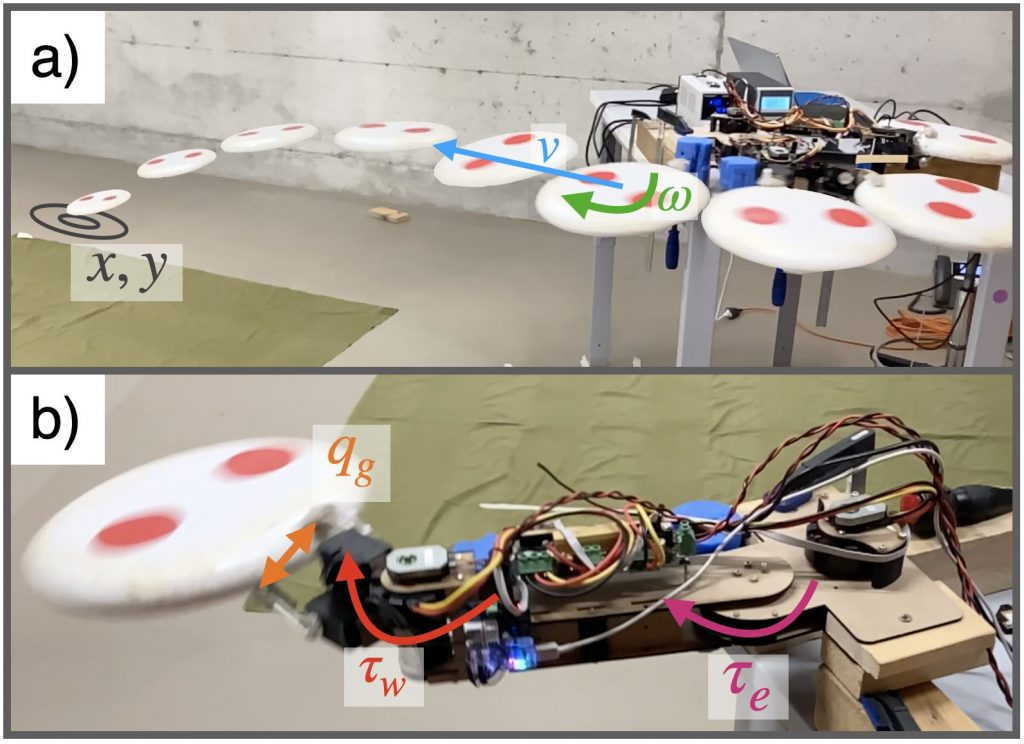
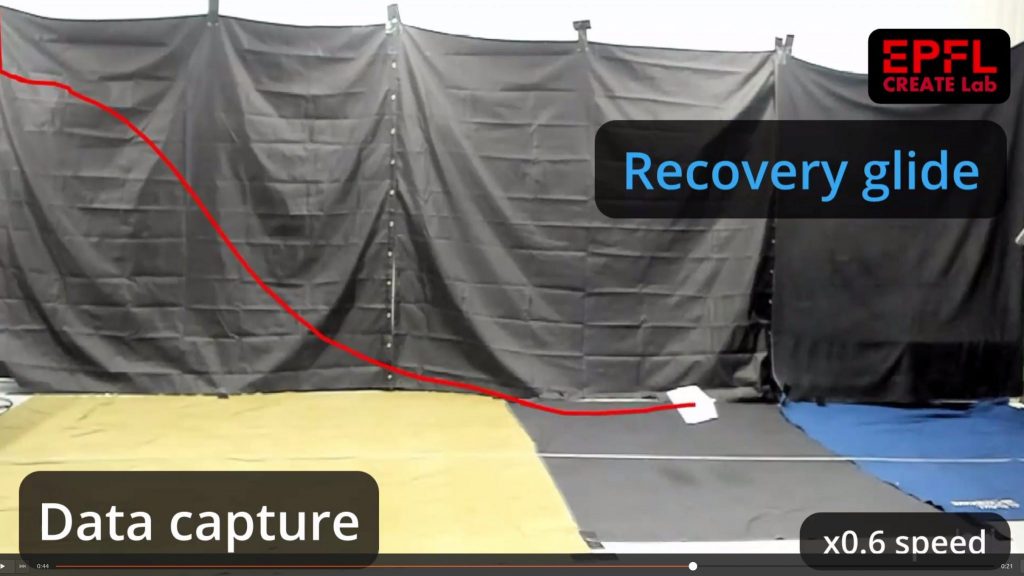
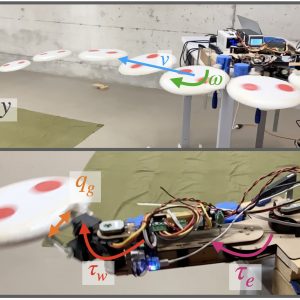
Soft body-fluid interactions: To understand and leverage the complex behaviour of the robot-fluid interactions, through novel robot design, experimentation, modelling, and optimisation.
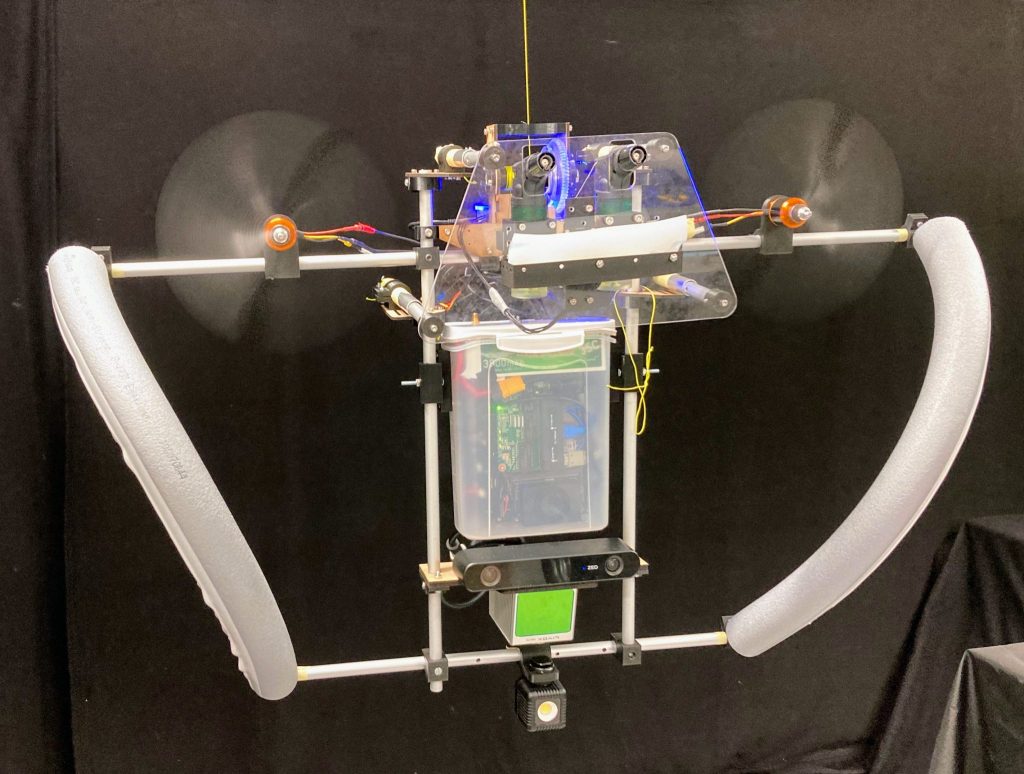
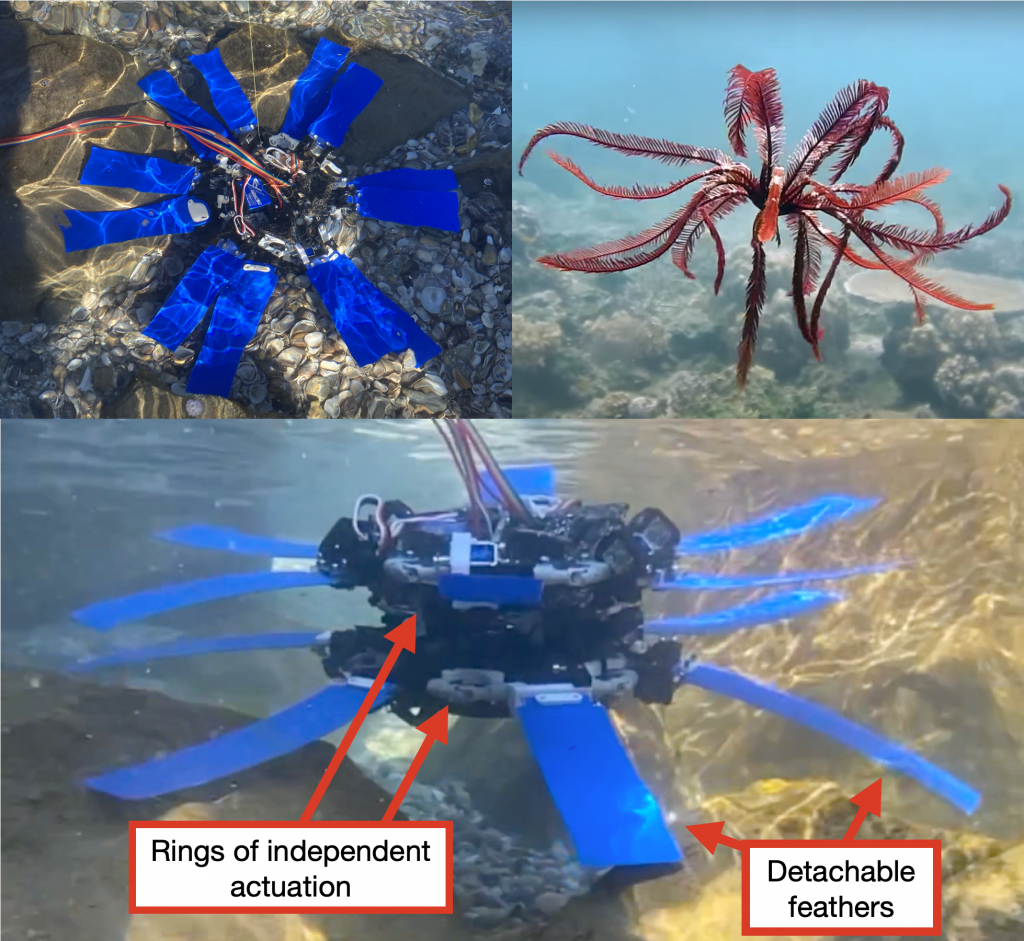
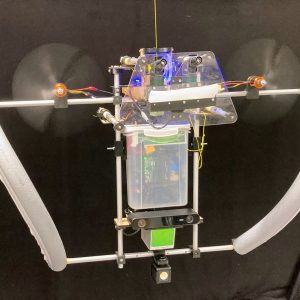
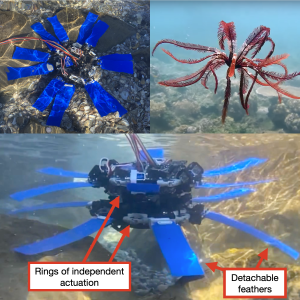
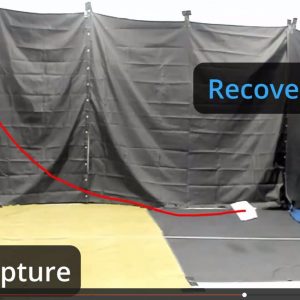
Robots in nature/sustainability: Designing and modelling robots to mimic/understand biology (plants) / Designing robots to be deployed in the wild.
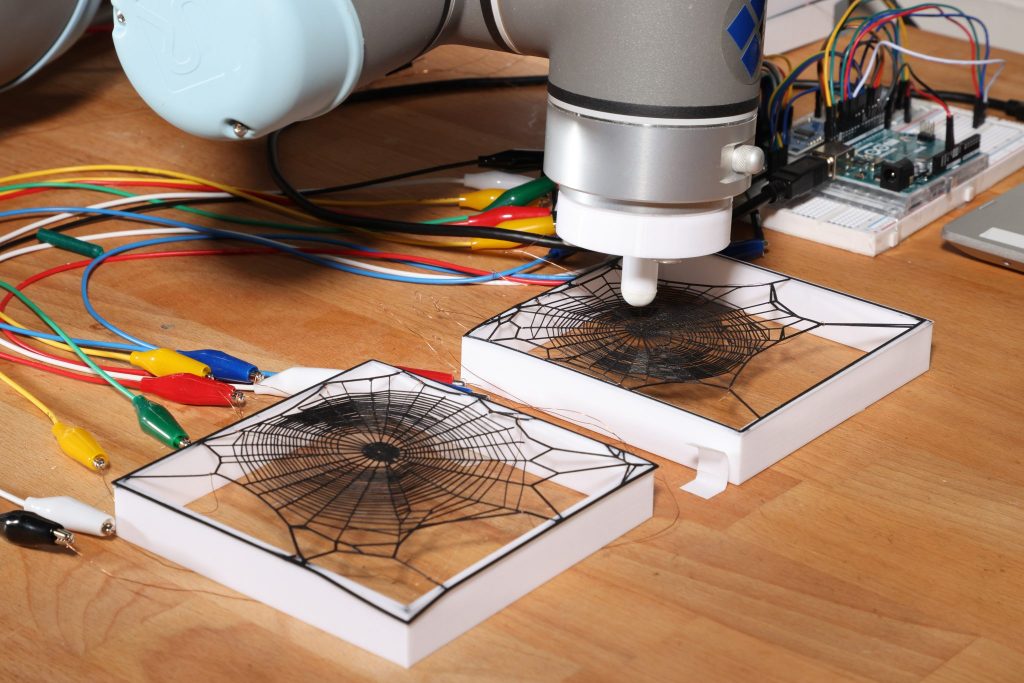
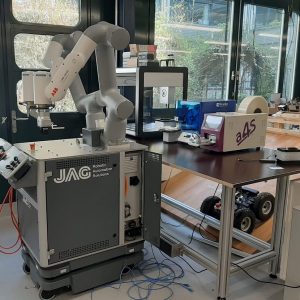
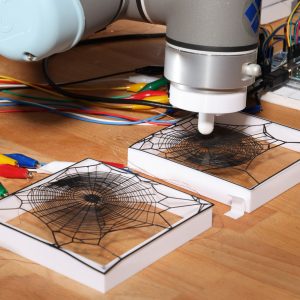
Robot ‘Scientist’: How can we use robots to explore scientific questions / How can robots be used most effectively for lab automation.
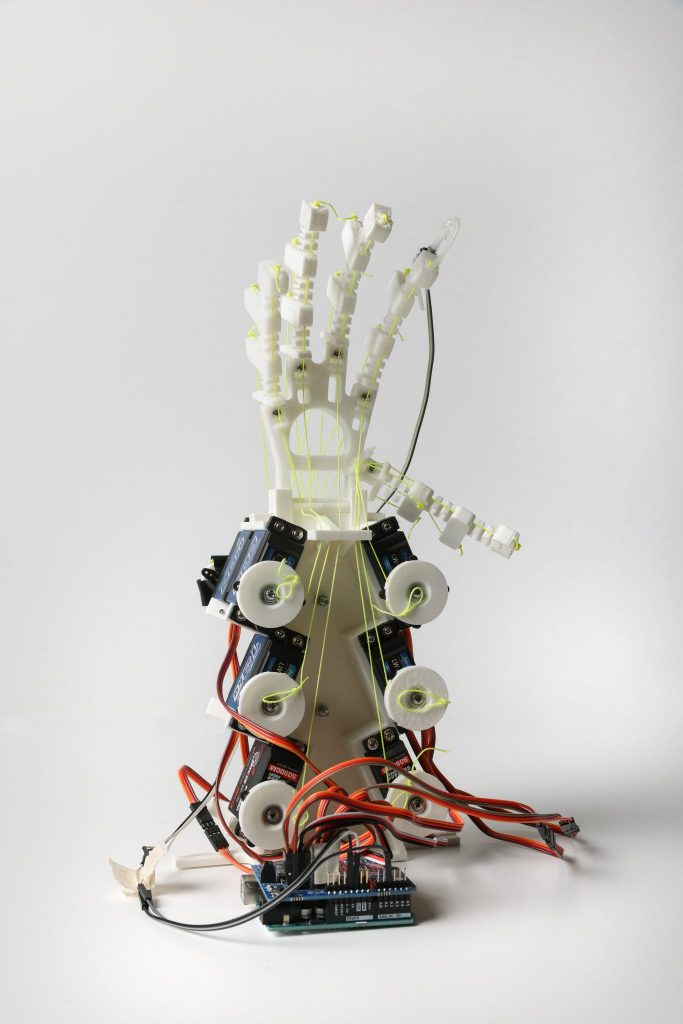
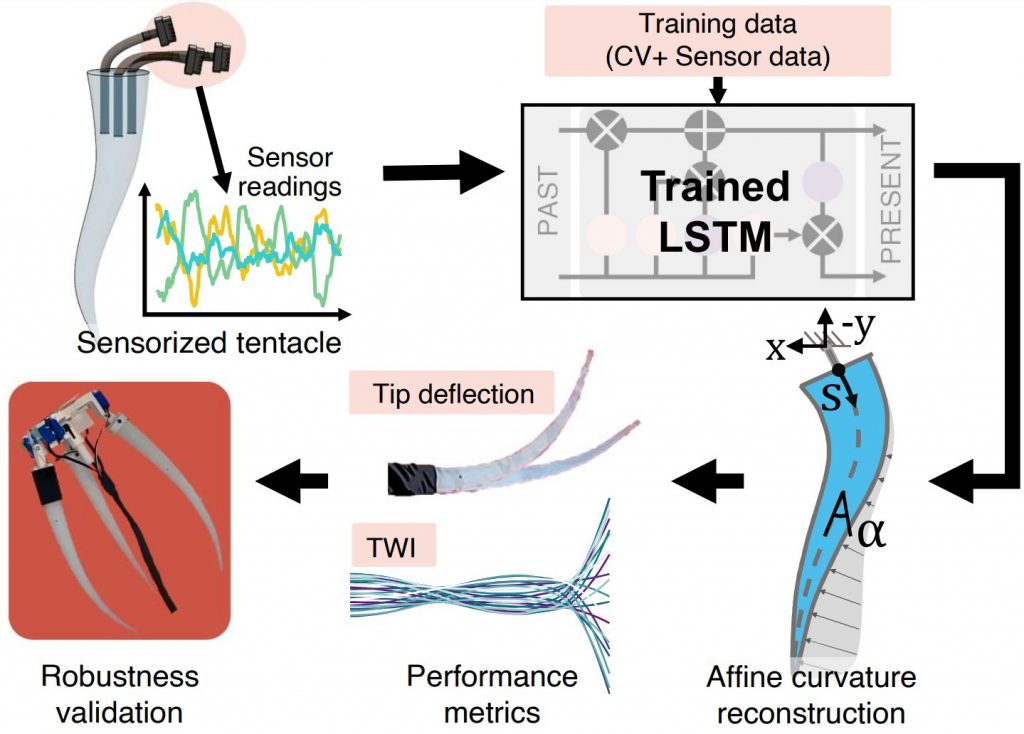
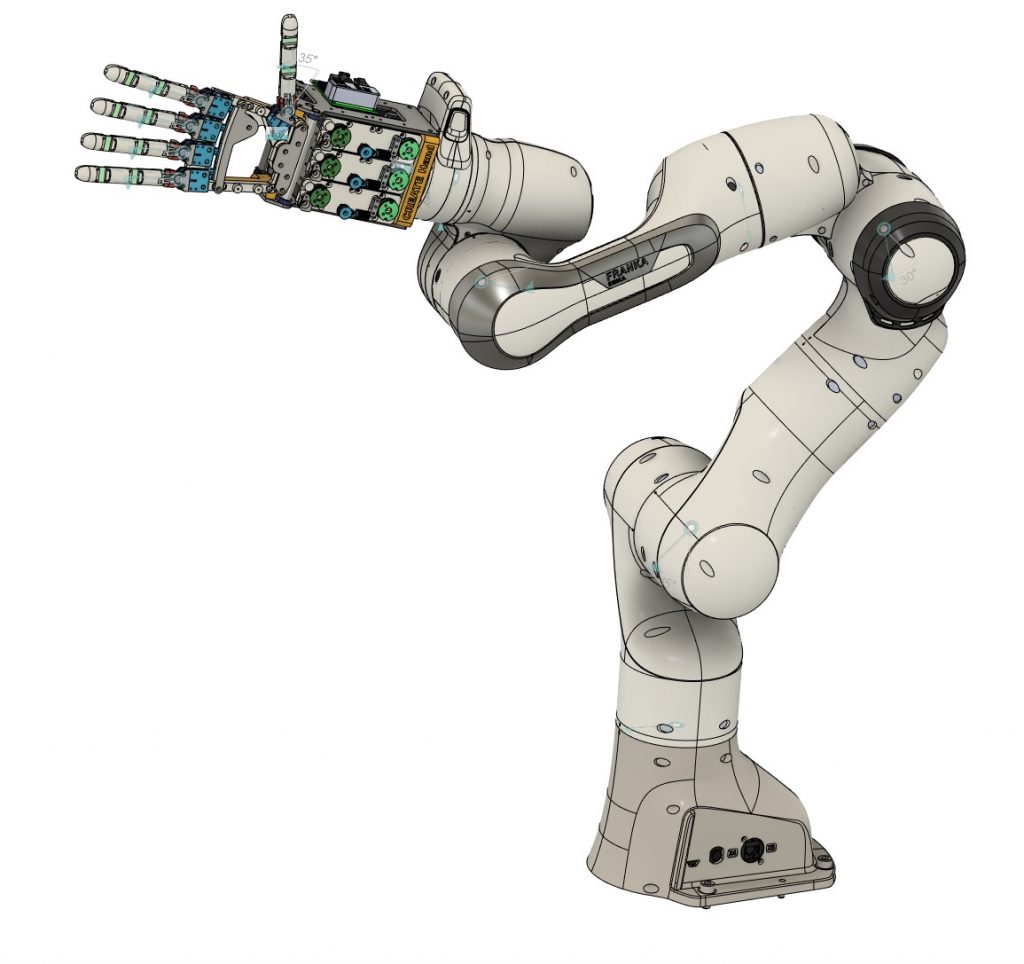
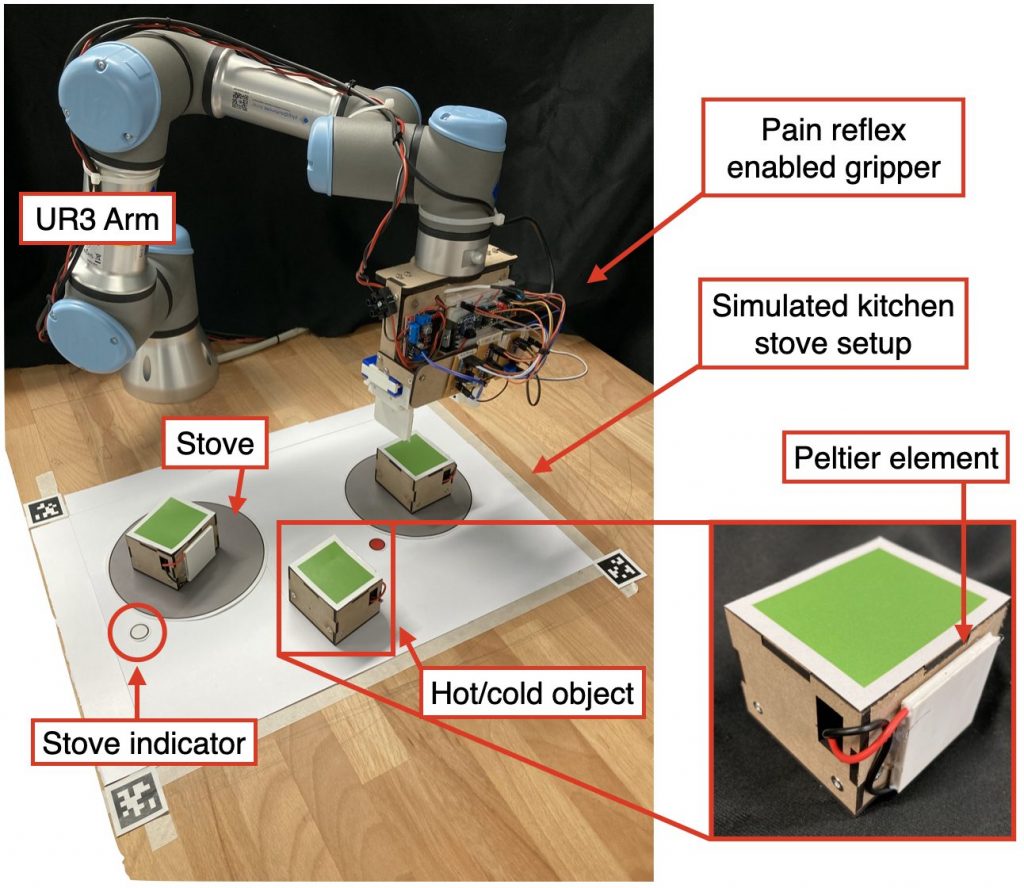
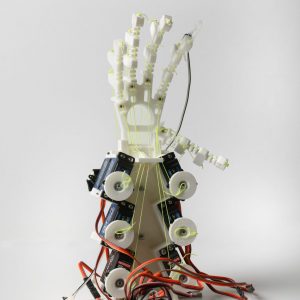
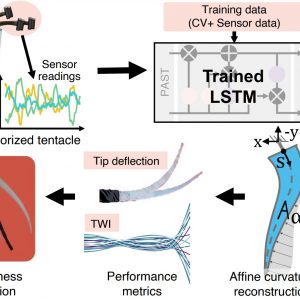
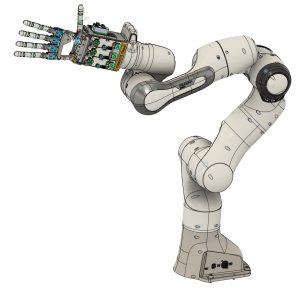
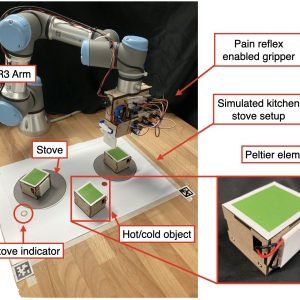
Robotic manipulation: Novel design and fabrication of robotic manipulators with a focus on the mechanics and distributed sensing. Understanding how the body of the manipulator can be leveraged to simplify control.