



Design, fabrication, and control of dexterous hands
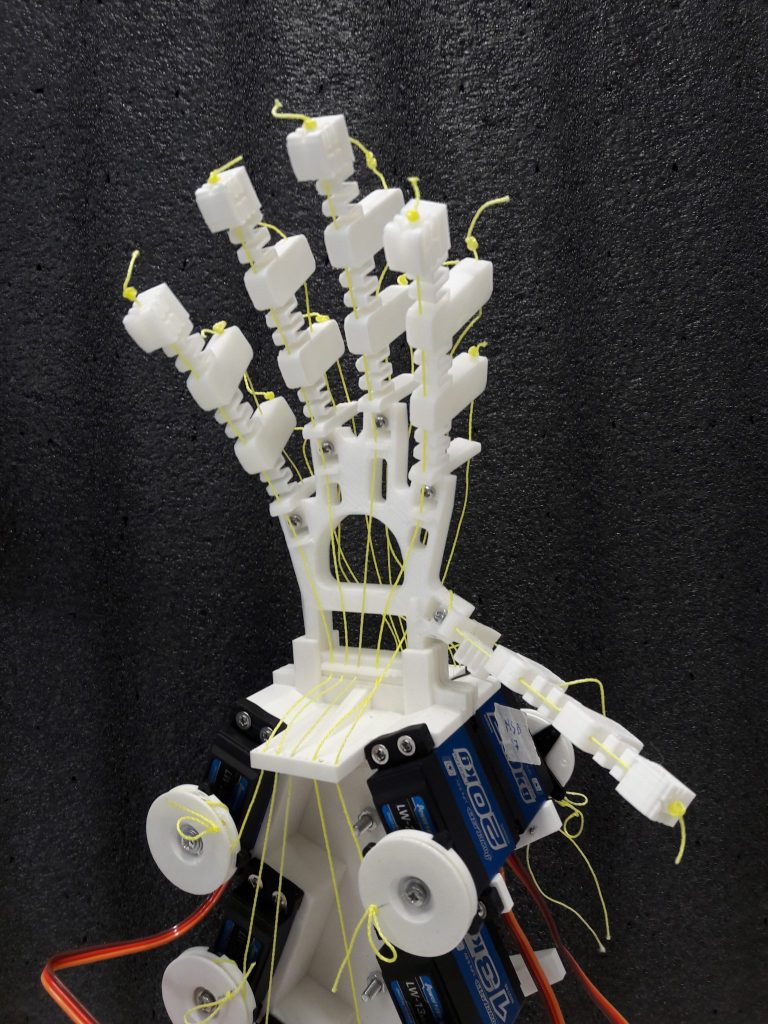
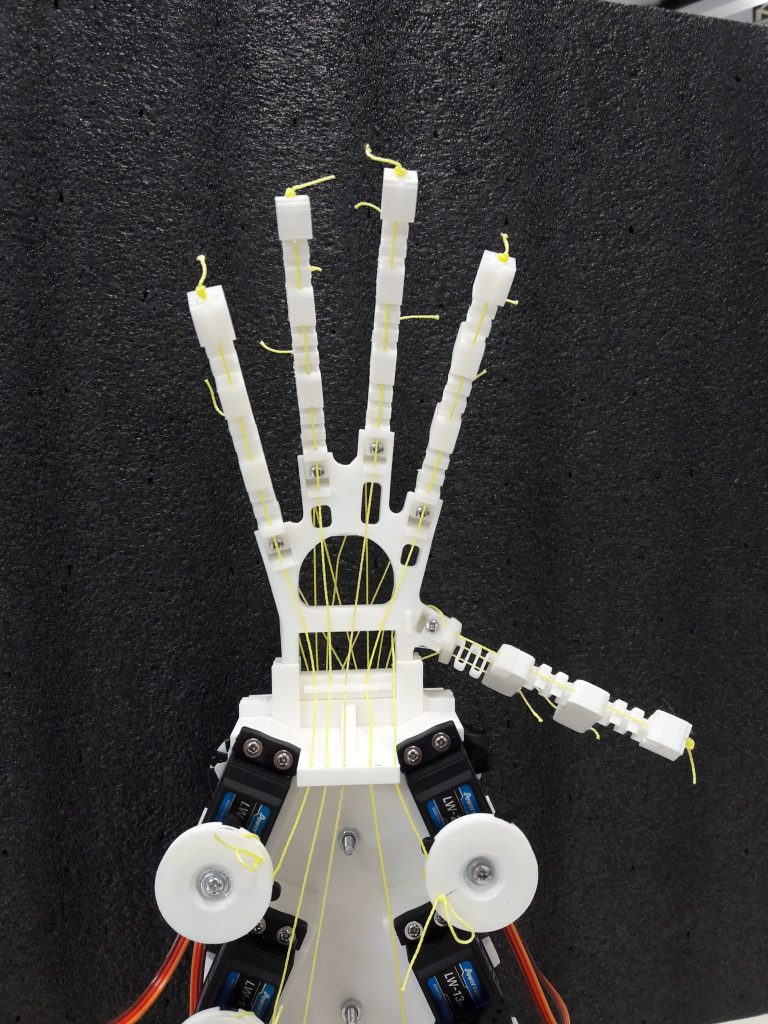
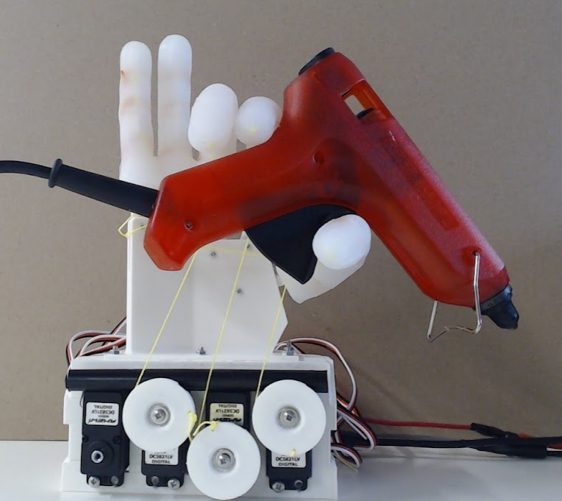
Robotic dexterous manipulation is integral for the development of robots that can aid human tasks, and is an ongoing research topic for decades. However, replicating a manipulation system resembling our human hands on robots is a highly challenging task due to the complexity both in the hardware and software. In this project, we approach this problem through the design and fabrication of tendon actuated soft-rigid robotic hands with integrated sensors, and the controller necessary for robust manipulation. Three driving motivations are: 1) how can we design the mechatronic system (body) by taking into account the controller (brain); 2) how can we reduce the complexity in the actuation and control by clever mechanical design with bio-inspiration and computational optimisation; and 3) how do we create repeatable, reliable, and robust soft-rigid mechanical structures and sensors.