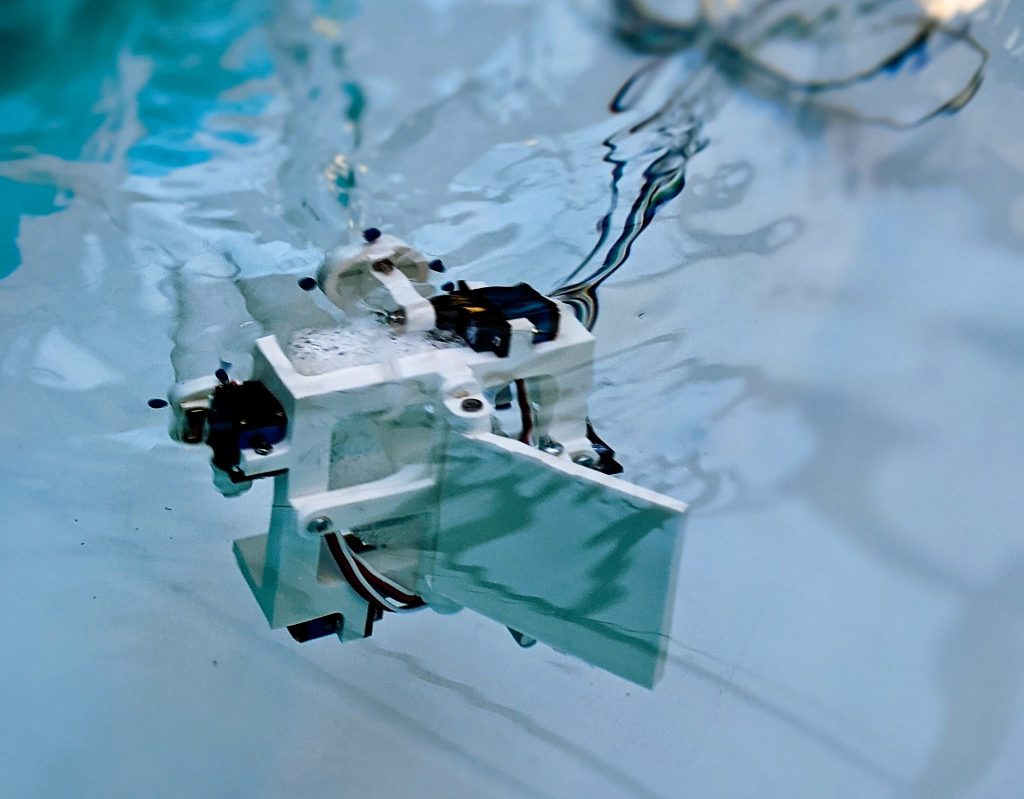

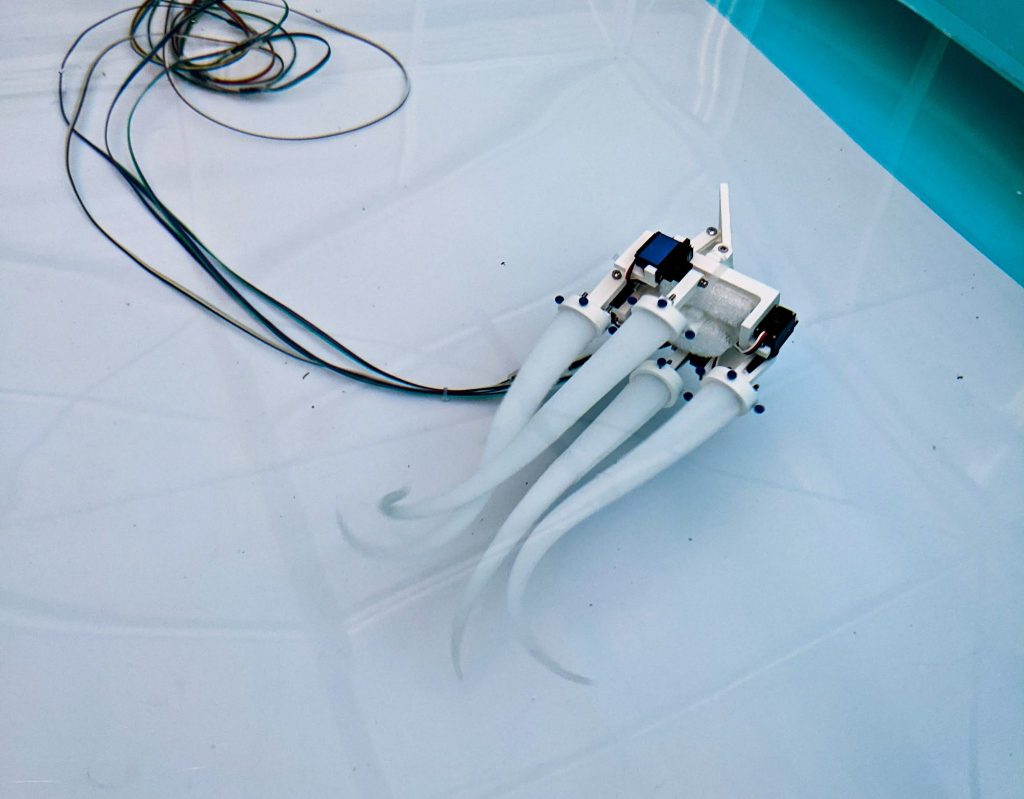


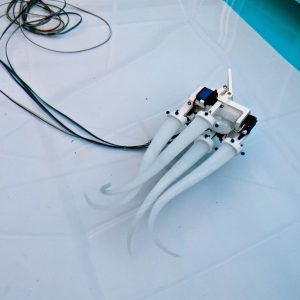
Soft underwater swimmer
The simulation of the soft body-fluid interactions is challenging, can be computationally expensive, and there often remains a significant gap between the simulated and real world behaviors. Data-driven model-based approaches show significant potential, however, we need efficient methods which scale and require minimal experimental data to capture a large design space. In this project, we investigate a passively actuated soft swimming robot. We propose a method leveraging ‘low-cost’ physics-based simulation to achieve a better quantitative match with the experimental results. We aim to understand how the design and control parameters influence the performance of our robotic swimmer.
