DeepLabCut
DeepLabCut™ is an efficient method for 3D markerless pose estimation based on transfer learning with deep neural networks that achieves excellent results (i.e. you can match human labeling accuracy) with minimal training data (typically 50-200 frames).
We demonstrate the versatility of this framework by tracking various body parts in multiple species across a broad collection of behaviors. The package is open source, fast, robust, and can be used to compute 3D pose estimates.
This package is collaboratively developed by the M.W. Mathis Lab and us at EPFL (releases prior to 2.1.9 were developed at Harvard University). More information can be found at the project website!
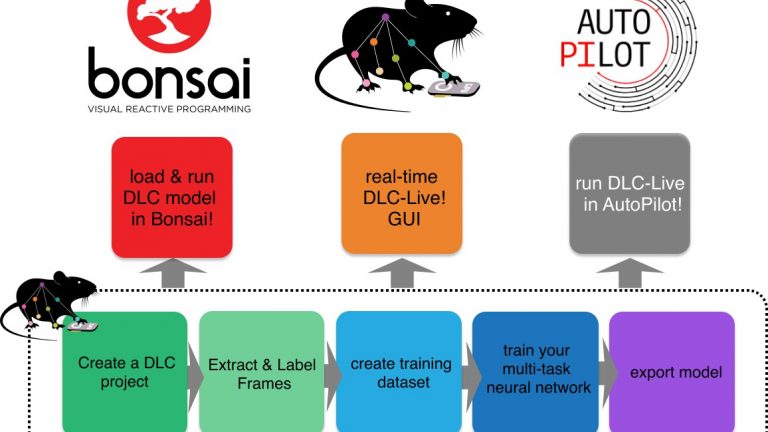
DLC-live!
DeepLabCut-Live! performs pose estimation in real time and allows closed-loop feedback on behavior. The code is here and the paper here.
This package is collaboratively developed by the M.W. Mathis Lab and us at EPFL. More information can be found at the project website!
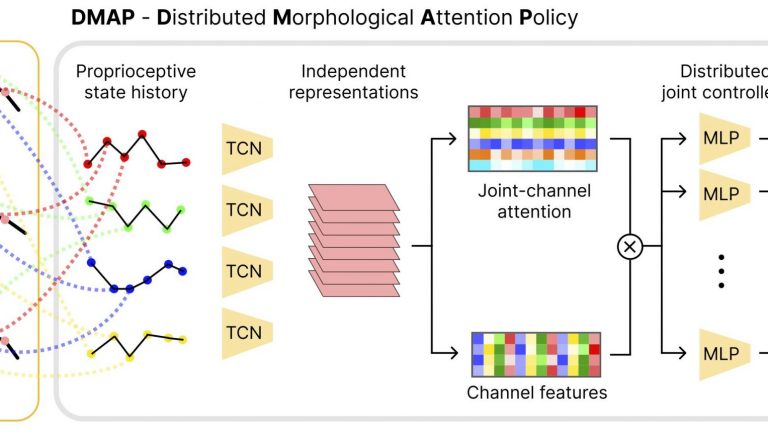
DMAP: a Distributed Morphological Attention Policy for Learning to Locomote with a Changing Body
DMAP is a network architecture that can be used to train Deep Reinforcement Learning agents to solve adaptive motor control tasks. We showcase DMAP in challenging locomotion tasks, in which agents of different shapes learn to walk with variable body parameters.
DMAP uses an attention mechanism to extract a context encoding from a history of observations and actions. If your agents are struggling with a motor control problem, in which the environment dynamics depend on unobservable variables, DMAP might be the solution you are looking for!
This repository is developed and maintained by the Mathis Lab at EPFL. More information can be found at the project website! (https://amathislab.github.io/dmap/)