Physics-Informed and Graph Neural Networks
Spatiotemporal graph neural networks (STGNNs) are among the state-of-the-art methods in machine learning for time series processing. STGNNs use message passing on spatial graphs to propagate information among nodes (time series) and to condition forecasts. One of the main challenges is designing message-passing mechanisms that are effective at propagating information over long spatial and temporal ranges. The project aims to design methods that enable long-range propagation using virtual nodes, i.e., by modifying the original graph by inserting nodes that can act as hubs for message passing.
Requirements:
- Experience in Python and PyTorch
- Familiar with graph and time series processing.
Keywords: graph neural networks, spatiotemporal data, time series forecasting.
You can apply by directly contacting Andread Cini by email on [email protected].
Description
This project explores graph neural network (GNN) models as efficient surrogates for incompressible fluid flow simulations. Using shear flow data from Polymathic AI, students will implement and benchmark GNS/MeshGraphNet, E(3)-GNN, and GMN architectures. The goal is to evaluate long-range rollout performance and generalization to new initial and boundary conditions.
Requirements
Python programming, machine learning knowledge, and familiarity with GNNs or CFD are recommended.
Keywords: Graph neural networks, Physics prior, Fluid mechanics
You can apply via SiROP or directly contact Vinay Sharma.
Reconstructing time-varying graph signals is a critical challenge in graph machine learning and graph signal processing, with various applications such as missing data imputation in sensor networks and time-series forecasting. Effectively addressing these tasks requires accurately capturing the spatio-temporal information inherent in these graph signals. Current methods, however, often rely exclusively on either graph signal processing methods or graph neural networks, limiting their ability to fully leverage the strengths of both approaches. This project aims to develop a new model for time-varying graph signal reconstruction, integrating the inductive bias from graph signal processing to graph neural networks.
Requirements:
1. Experience in Python and PyTorch
2. Familiar with graph machine learning and/or graph signal processing.
Keywords: Graph neural networks, graph signal processing, time-series reconstruction.
You can apply via SiROP or directly contact Zepeng Zhang.
In this context, traditional physics-based models offer high physical interpretability, but their modeling process is complex and requires expertise. Data-driven models have also been applied with success, though they often lack interpretability or are physically inconsistent.
A promising approach for thermal dynamics modeling involves combining traditional physics-based models together with data-driven models to leverage their respective advantages. The combination itself can be constructed in different ways, each exhibiting its particular characteristics. A preliminary case study on a single building used the EnergyPlus software as the physics-based model, combining it with different data-driven models and showed encouraging results in the context of building temperature dynamics simulation. However, the effect of hybrid combinations at large-scale for multiple buildings still remains underexplored.
This project focuses on exploring the combination of physics-based and data-driven models for building thermal modeling at large-scale. The main objective is to investigate the capabilities of such hybrid models regarding predictive accuracy, physical consistency, and data dependency. The general tasks are as follows:
- Conduct a comprehensive literature review about building energy modeling techniques and hybrid models
- Analyze available large-scale building energy data
- Explore hybrid models for time series regression
- Evaluate proposed methodologies and compare it to a variety of benchmark models.
Prospective candidates are expected to possess a foundational understanding of statistics, optimization, machine learning, and practical experience in programming in Python Knowledge of HVAC systems and building energy modeling is a plus. Interested students are asked to submit an updated CV along with transcripts of academic records.You can apply via SiROP or directly contact Leandro von Krannichfeldt
This project explores how we can use physical and engineering knowledge about structures to better simulate them using neural networks. For some years, graph neural networks (GNNs) have been state-of-the-art methods for surrogates of finite element method (FEM) simulations. While there have been some approaches that use physics-informed loss functions, what the current models lack is the incorporation of physical knowledge directly into the model architecture. This is what we will do here; we will go one step beyond. The student will start from a state-of-the-art graph neural network and apply a physics/engineering inductive bias to improve the performance of the simulator and make it more stable. The goal is to evaluate stable rollouts and simulate dynamic oscillations of simple geometric structures, like composite plates.
Python programming and machine learning knowledge are required. Additionally, familiarity with GNNs or FEM is recommended. You can apply directly by contacting Kevin Steiner.
Machine Learning for Industrial and Engineering Applications
Bainite content is an important descriptor of steel microstructure, but accurately quantifying it in mixed bainite–martensite steels remains highly challenging. In microscope images, bainite and martensite often appear extremely similar, making reliable visual inspection difficult even for experts. In addition, variations in sample preparation and microscope illumination can lead to strong changes in image brightness, contrast, sharpness, and color across datasets. As a result, standard image segmentation approaches often fail because there is no clear boundary between the phases.
This project aims to develop machine learning methods for the automated quantification of bainite fraction directly from microscopy images. The work will involve building and evaluating end-to-end models that can learn robust microstructure representations despite strong dataset shifts caused by different microscope platforms and acquisition conditions. A key objective is to design approaches that generalize across varying imaging domains and provide accurate bainite fraction predictions without relying on manual phase segmentation.
The student will work at the intersection of materials science, computer vision, and machine learning, on a problem with direct industrial relevance.
Requirements:
- Good programming skills in Python
- Basic knowledge of machine learning and deep learning
- Interest in computer vision and image analysis
- Motivation to work on an applied project in collaboration with an industrial partner
Keywords: materials informatics, microstructure analysis, computer vision, domain shift, deep learning, steel microstructures.
To apply, contact: Ismail Nejjar directly at [email protected]
Conformal prediction (CP) is an uncertainty quantification method that uses prediction errors on a calibration set to estimate the uncertainty of predictions for unseen data. Standard CP works well for i.i.d. data, but its theoretical guarantees can break down if the data distribution changes. This project aims at assessing CP methods in the context of data characterized by strong spatial and temporal dependencies. You will work on adapting existing methods to operate on spatiotemporal data and test different methodologies on specific tasks, with a focus on reconstructing missing data from partial observations.
Requirements:
- Good foundations in statistics.
- Experience on working with time series and/or spatiotemporal data.
- Good programming skills (Python).
Keywords: uncertainty quantification, conformal prediction, spatiotemporal data.
To apply, contact Andrea Cini directly [email protected].
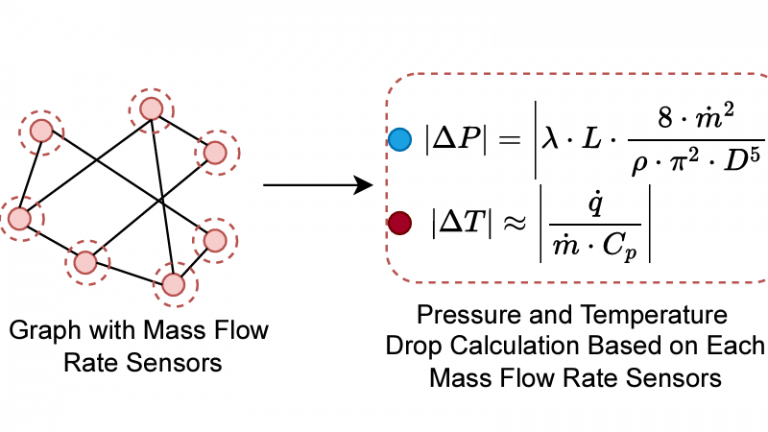
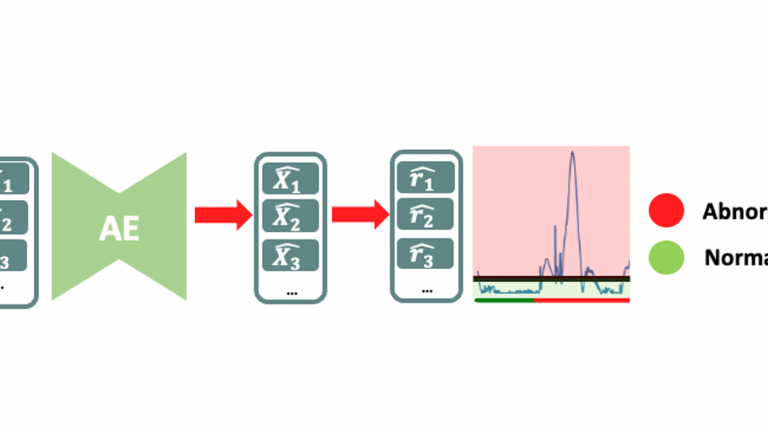
This project aims to develop an agent-based framework for fault diagnosis and root cause analysis in industrial systems. It focuses on overcoming the limitations of supervised approaches by enabling unsupervised fault diagnosis without relying on labeled failure data.
The approach combines Large Language Model (LLM) reasoning with digital twins to allow interactive and iterative analysis of system behavior. By leveraging counterfactual reasoning, the agent can simulate alternative operating conditions to better identify and isolate the origin of faults. This enables a shift from passive anomaly detection toward more interpretable and actionable diagnosis. Ultimately, the project seeks to advance autonomous, data-efficient, and explainable diagnostic systems.
Keywords: Fault Diagnosis, Root Cause Analysis, Unsupervised Learning, Large Language Models, Digital Twin.
You contact Amaury Wei or apply via IS-Academia (project #14319).
Having interpretable and stable simulations is important for industrial applications. Nowadays, machine learning methods for simulating material deformation can produce results on par with finite element method (FEM) simulators. However, the information we recover is often incomplete and bound to the parameters tracked in the dataset eventhough we could infer the missing information with known material laws. This is what we will do in this project; we will incorporate material laws into our neural network. The student will start from a state-of-the-art graph neural network and incorporate the materials constituitive relations into the model itself to accurately predict the material stress. The goal is to evaluate this physics-informed approach with respect to learning the stress as a distinct learning objective.
Python programming and machine learning knowledge are required. Additionally, familiarity with GNNs or FEM is recommended. You can apply directly by contacting Kevin Steiner.
Qualifications
- Background in Computer Science, Data Science, Electrical Engineering, Aerospace Engineering, Robotics, Mechanical Engineering, or a related field
- Strong programming skills in Python
- Familiarity with machine learning, data analysis, and signal processing
- Interest in anomaly detection, fault diagnosis, or predictive analytics
- Strong problem-solving and communication skills
- Knowledge of Graph Neural Networks (GNNs) is a plus.
Keywords: anomaly detection, machine learning, signal processing, UAV, root cause analysis
You can apply by directly contacting Keivan Faghih [[email protected]].

Computer Vision and Multimodal Learning Applications
Recent advances in neural scene reconstruction, such as Neural Radiance Fields (NeRF) and Gaussian Splatting, have significantly improved the performance of downstream tasks, including novel view synthesis and geometric reconstruction. Building on these innovations, multi-modal approaches have been explored to incorporate additional scene attributes such as depth, surface normals, thermal data, and semantic information to enrich existing scene representations. However, current multi-modal methods often rely on a tightly coupled correspondence between RGB data and other modalities, which limits their applicability in uncontrolled, real-world scenarios.
Description:
This project aims to address the challenge of strong cross-modal dependencies in 3D reconstruction, with a particular focus on RGB and thermal imaging. The goal is to develop robust techniques that can establish correspondences between different modalities, or align image features in three-dimensional space, thereby enabling accurate reconstruction without the need for strict pixel-level alignment across modalities.
Objectives:
– Conduct a comprehensive literature review on multi-modal 3D reconstruction techniques, with an emphasis on robustness and cross-modal integration
– Investigate contrastive learning approaches for identifying correspondences between RGB and non-RGB modalities
– Explore strategies for 3D-space feature alignment and rendering-based pose optimization
– Extend the reconstruction framework to incorporate additional modalities, including semantic labels and inputs with weak or no geometric correlation
Keywords: Multi-modal fusion, Visual-based 3D reconstruction, thermal imaging
You can apply by directly contacting Chenghao Xu.
Description
This project investigates the use of detailed Swiss lidar data (swissSURFACE3D) combined with computer vision techniques to extract key building properties at scale. The focus will be on estimating building features such as window-to-wall ratio or building type for further processing in Urban Building Energy Modeling software.
- Conduct a comprehensive literature review about Computer Vision techniques for building parameter extraction
- Investigate suitable settings to train the Computer Vision model in the context of Urban Building Energy Modeling on a large scale
- Explore the proposed methodology in the case of Swiss Lidar data on municipality or city-level
Prospective candidates are expected to possess a foundational understanding of statistics, optimization, machine learning, and practical experience in programming in Python. Experience in Computer vision is highly recommended and knowledge about urban building energy modeling is a plus. Interested students are asked to submit an updated CV along with transcripts of academic records.You can apply via SiROP or directly contact Leandro von Krannichfeldt
Most deep models are trained under a close-world assumption and hence do not possess knowledge of what they do not know, leading to over-confident and inaccurate predictions for unknown objects. Out-of-distribution (OOD) detection, which aims to identify unknown objects, has attracted much attention as it plays a vital role in a variety of applications such as industrial inspection, medical diagnosis, and autonomous driving. One of the primary challenges of effective OOD lies in the wide-existing domain shift in the real world. The testing dataset might have a significant distribution from the training data of deep learning models. Thus, it is even more difficult for the model to distinguish between the domain difference and the OOD objects. In this task, the student is expected to work on the OOD detection task with domain shift. Specifically, we focus on test-time domain adaptation, which focuses on OOD detection during inference time online. The potential application case can be found here: https://www.epfl.ch/labs/cvlab/data/road-anomaly/. Overall, the goal of this project is to improve the OOD performance on new domains through the use of test-time domain adaptation techniques. The student is expected to undertake the following tasks in this project: – explore current test-time domain adaptation methods – improve those methods and modify them for OOD detection.
You can apply via SiROP or directly contact Han Sun.