The AddLidar platform enables researchers at EPFL’s ESO laboratory to efficiently manage, process, and visualize massive airborne LiDAR datasets through a web-based interface. Built on a Kubernetes-based infrastructure, the system automates the pipeline from raw data ingestion to interactive 3D visualization, handling datasets exceeding 100GB with automated compression, conversion, and web optimization.
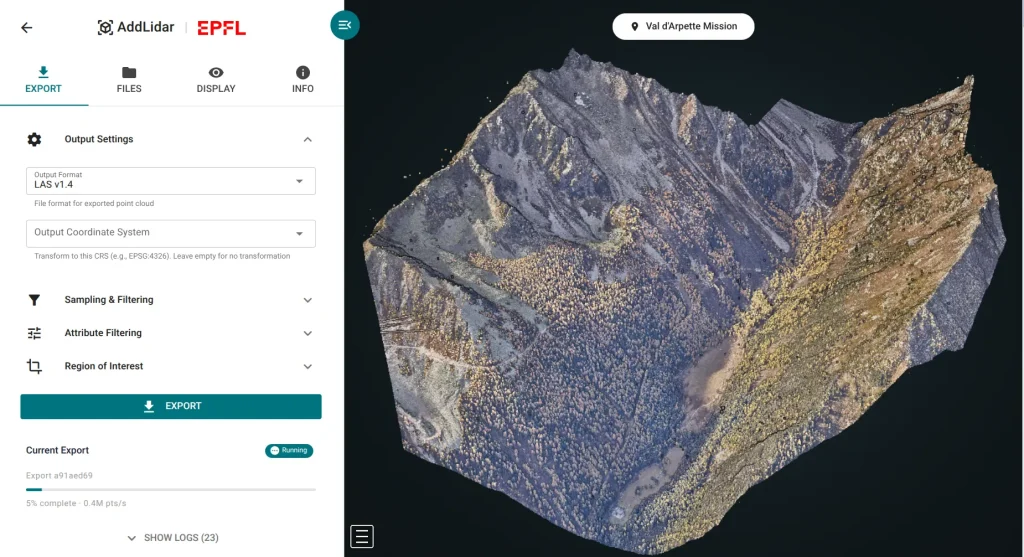
Researchers can upload new missions and manage metadata, while the integrated Potree viewer provides browser-based 3D point cloud visualization with real-time attribute switching between elevation, intensity, and classification layers. The platform features an on-demand processing API that allows users to submit custom filtering and transformation requests through a web form, with WebSocket connections providing live progress updates for long-running jobs.
An automated daily scanning system detects new LiDAR data on network storage, triggering parallel batch processing jobs that compress archives and generate web-optimized octree structures. Supporting both static file downloads and custom processing workflows, AddLidar makes complex LiDAR data management accessible for glaciology and environmental research.
ENACIT4R designed and implemented the complete infrastructure, creating a unified Vue.js application that integrates mission management with the Potree visualization engine through a custom Kubernetes orchestration layer. Key technical innovations include a fingerprint-based change detection system for efficient data synchronization, parallel batch processing with anti-affinity scheduling across 4 compression workers and 2 conversion workers, and a WebSocket-based progress tracking system that provides real-time feedback for processing jobs that can run for hours. The platform addresses the challenge of making 100GB+ point cloud datasets accessible through standard web browsers while maintaining research-grade data quality.