L005———————————————————————————
Friction compensation for a linear motor
Friction is present in all mechatronic devices and for the great majority of these its presence deteriorates the device’s performance. The presence of friction in systems leads to phenomena such as tracking errors, limit cycles and stick-slip motion. It is therefore of great interest to be able to model, identify and compensate friction.
As a manufacturer of high precision linear motors, the Swiss company ETEL is understandably interested in this problem. Projects have been, previously carried out at the Laboratoire d’Automatique in collaboration with ETEL (see previous student projects), to identify the parameters of a friction model for a linear motor.
This project proposes using the previously identified model to compensate the friction. Different compensation schemes will be tested in simulation and on the motor.
The project is proposed in collaboration with the Swiss company, ETEL.
Professor: Roland Longchamp
Type of project: Master
Assistants: Mark Butcher and Alireza Karimi
Student: Charlie Darricau
G021———————————————————————————

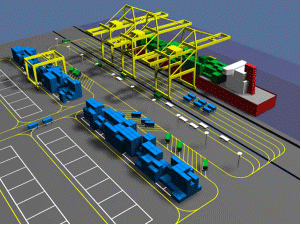
Reduced-scale automated guided vehicles for the transshipment of Containers
The Laboratoire d’Automatique is collaborating with the Numexia Company to develop the next generation of Automated Guided Vehicles (AGVs) for transshipment at container terminals.
This project has two steps:
Step 1) A reduced-scale AGV will be developed using four e-puck mobile robots constituting the four steering axles.
Step 2) The control architecture of the actual AGV will be emulated by coupling adequately the e-puck control systems. The μAGV should also be located in its environment.
MER : Denis Gillet
Type of project: Master
Assistant: Sylvain Rudaz
Student: Jean Etienne Holzeisen
G022———————————————————————————
Control strategy for automated guided vehicles
The Laboratoire d’Automatique is collaborating with the Numexia Company to develop the next generation of Automated Guided Vehicles (AGVs) for transshipment at container terminals.
The aim of this project is twofold. First, the model of the reduced-scale AGV made of e-puck mobile robots will be established. Then, corresponding path planning and tracking approaches will be investigated in simulation. Cooperative versus competitive approaches will be simulated and implemented to show the effectiveness of a solution that permits crossing trajectories. If available, coordination methods will be implemented on a μAGV constituted with four e-puck robots.
MER : Denis Gillet
Type of project: Master
Assistant: Sylvain Rudaz
Student: Jannick Fenner
G013——————————————————————————–
Modeling of meal absorption in diabetic patients
In type-1 diabetes, the pancreas no longer produces insulin. This deficiency should be compensated by an exogenous delivery of insulin. Ideally, this is performed using an insulin pump, which makes it possible to continuously adjust the infusion rate. The insulin profile should be optimized in order to maintain the blood glucose concentration in a reasonable range. From a control point of view, the insulin infusion rate represents the manipulated variable and the blood glucose concentration the controlled variable. However, the relationship between these two variables is not fully understood. It has been shown that numerous factors have a significant influence. A precise quantification of these influences is tedious because of a lack of understanding of the underlying phenomena on one side and the lack of measurements which would make it possible to decouple these effects on the other side.
The most important influence is certainly caused by meals. Indeed, meals usually lead to an important glucose flux in the blood. The quantity and the composition of the meal both have a significant influence on the dynamic behavior of this glucose flux. So far, no model has been developed that takes into account explicitly the meal information (composition + quantity). The goal of this project is to develop such a model.
MER : Denis Gillet
Type of project: Master
Assistant: Nirav Bhatt
Student: Veronika Trottman
L001———————————————————————————
Modeling of a levitation motor
Linear Levitation motors are used for high-precision positioning in photolithography and wafer inspection in semi-conductor manufacturing industries. Levitation motors have only a single moving part with six degrees of freedom so as to reach nanometer resolution. This type of motor ensures long displacements in the x and y axes combined with a short displacement in the z direction. Rotational displacement around all axes can also be achieved. The moving part contains four sets of three-phase coils levitated above a block of permanent magnet arrays. The coil currents can be located in the spatially varying field of magnet arrays so as to provide independent controllable levitation and translation forces.
The objective of this project is to develop a mathematical multivariable model of a levitation motor using dynamic equations of motion of the levitated part. The resulting nonlinear equations will be linearized at different operating points. The coupling effect between different axes and the position dependency of the model parameters will be studied.
This project is done in collaboration with a Swiss industrial partner.
Professor: Roland Longchamp
Type of project: Master
Assistants: Marc Kunze and Alireza Karimi
Student: Vincent Reymond
G024——————————————————————————–
Dedicated controller design for a dual-stage mechatronic system
For improving the resolution of the Very Large Telescope Interferometer (VLTI) by rejecting the atmospheric disturbances on the spatial observations, a mechanical prototype is being developed at the EPFL. The system is made of a double-stage structure. The first stage is a blade guiding structure driven by a high-accuracy nonlinear micro-stepper motor with a precision of 100nm. The second stage mounted on the first one is a fine positioning piezo actuator with a nanometer accuracy. The overall structure is supposed to be able to follow a reference trajectory at very high accuracy (nanometer scale) over a course of 70 mm for frequencies up to 200 Hz.
The EPFL is also involved in the development of an optical differential delay line (DDL), whose purpose is to compensate for the atmospheric perturbation on the Very Large Telescope Interferometer located in Chili. A Permanent Magnet (PM) stepper motor is used to actuate the coarse stage of the DDL. This stepper motor is currently driven by an algorithm based on direct voltage control of its phases, which is not optimal from a power consumption point of view.
Two main activities of this project are:
1) To design a dual-stage controller (traditionally dedicated to dual-stage hard disk drives) for this over-actuated system, the performance of which will be compared to the current decoupled dual-stage SISO design. As the prototype is available, it will be possible to measure, implement and test the algorithms in real conditions.
2) To develop a specific nonlinear controller for the PM motor in order to reach a sub-micron dynamic accuracy and, simultaneously, to ensure fast translation over several centimeters without exceeding the power limitation. This new algorithm will be based on direct current control of the motor. As the prototype is available, it will be possible to measure, implement and test the algorithms in real conditions.
This project is proposed in collaboration with the Observatory of Geneva and the European Southern Observatory in Munich.
MER : Denis Gillet
Type of project: Master
Assistants: Yvan Michellod and Philippe Mullhaupt
Student: Michael Stalder
G027——————————————————————————–
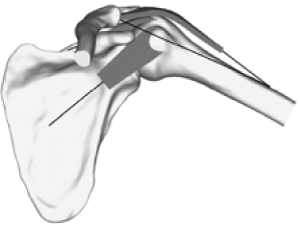
Modeling of a shoulder
To simulate diseases and artificial replacements of the glenohumeral joint, the Joint Biomechanics Group at the Laboratory of Biomechanical Orthopedics (LBO) has developed a finite element model of the shoulder. Computed tomography scans of a normal cadaver shoulder were used to reconstruct the geometry of the scapula and humerus, and dissection of the same shoulder provided muscle origins and insertions. Six muscles were considered: middle deltoid (MD), anterior deltoid (AD), posterior deltoid (PD), supraspinatus (SS), subscapularis (SC), and infraspinatus combined with teres minor (IS).
Even with only six muscles, there are more unknown forces than available equilibrium equations. Until now, this indeterminacy has been solved by assuming constant muscle force ratios. According to EMG measurements, this hypothesis is reasonable for the elevation in the plane of the scapula, but becomes less acceptable for more complex movements.
The aim of this project is twofold. First, a simplified dynamic model of the shoulder will be developed. Then, the problem of an over actuated system will be solved by testing and applying different optimization strategies. This project is carried out in collaboration with Alexandre Terrier (LBO)
MER : Denis Gillet
Type of project: Master
Assistants: Yvan Michellod and Philippe Mullhaupt
Student: Martin Aeberhard
G030——————————————————————————–
Stochastic modeling of the glucose-insulin relationship for diabetic patients
In type 1 diabetes, the pancreas does not produce insulin any longer. This deficiency should be compensated by an exogenous delivery of insulin. Ideally, this is performed using an insulin pump. Such a pump makes it possible to adjust continuously the infusion rate. The insulin profile should be optimized in order to maintain the blood glucose concentration in a reasonable range. From a control point of view, the insulin infusion rate represents the manipulated variable and the blood glucose concentration the controlled variable. However, the relationship between these two variables is not fully understood. It has been shown that numerous factors have a significant influence. A precise quantification of these influences is tedious because of a lack of understanding of the underlying phenomena on one side and the lack of measurements which would make it possible to decouple these effects on the other side.
An additional difficulty for quantification is the variability between patients as well as the variability of one patient at different moments in time. The goal of this project is to develop a model that explicitly accounts for these uncertainties, using stochastic modeling techniques. Both the model parameters and the variability will then be estimated using clinical data.
MER : Denis Gillet
Type of project: Master
Assistant: Klaske Van Heusden
Student: Michael Cubero
L002———————————————————————————
Self-sensing active magnetic bearing
Magnetic bearings are becoming widely used for high-speed motors in many industries. To operate properly, they rely on a suitable control action. This also guarantees safety and improves efficiency.
Classical control of such devices rely on the measurement of the position of the rotor with respect to the stator. This approach has nonetheless the major drawback of requiring a position sensor.
The proposed project studies the possibility of circumventing the need of directly measuring the position. The position can then be extracted from voltage and the current histories that have been applied to the actuator coils.
It is proposed to study nonlinear methodologies to address both, the estimation of the position between the rotor and the rotor, and the stability of the closed-loop system using a well-designed controller. This will then open a vast array of applications and cost improvements of existing magnetic-bearing technology.
The results will be compared and validated through simulation.
Professor: Roland Longchamp
Type of project: Master
Assistants: Gorka Galdos and Philippe Müllhaupt
Student: Roman Amstad
G026——————————————————————————–

Exhibition robot
The aim of this project is to develop a LabVIEW interface to control a LEGO-NXT Robot, which will be used in the context of a forthcoming exhibition at the “Espaces des Inventions” to present the concept of transmission delay. The experience will simulate a transmission from Lausanne to Geneva, from the earth to the moon or from the earth to Mars. The robot control will be based on the remote experimentation setup developed at the Laboratoire d’Automatique. Specific care will be taken to ensure the robustness of the chosen configuration (hardware and software) to minimize the experimentation downtime.
This project has been proposed by the Espaces des Inventions .
MER : Denis Gillet
Type of project: Master
Assistant: Christophe Salzmann
Student: Marc Clapera
B017——————————————————————————–
A state-feedback controller for the Spider-Crane
To improve container transfer rates, a new highly efficient crane named “Spider-Crane” has been designed and its nonlinear controller developed at the Automatic Control Laboratory. In addition, a reduced-order model of Spider-Crane is available. This project contains a theoretical and a practical part.
The theoretical part has two objectives: (i) design a linear state feedback controller for Spider-Crane based on its reduced-order model. (ii) elaborate a dynamic feedback linearization scheme.
The practical part consists in: (i) identifying the physical parameters of the reduced-order model of Spider-Crane and its DC motors. (ii) implementing the controller developed in the fist part in a real-time kernel. (iii) developing the interface and steering aid, if time is available.
Professor: Dominique Bonvin
Type of project: Master
Assistants: Willson Shibani and Davide Buccieri and Philippe Müllhaupt
Student: Gregoire Salamin
G008——————————————————————————–
An adaptive interface for eLogbook mobile users
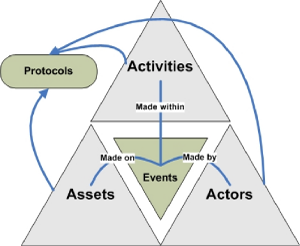
The eLogbook is a collaborative Web-based environment that provides awareness services for its users in order to sustain collaboration and coordination. It consists of an activity-oriented workspace where Actors, engaged in Activities, perform several actions (such as linking, submittal, evaluation, sharing etc.) over stored Assets (i.e. files of any type). Protocols are used to define access rights of Actors over Activities and Assets.
The aim of this project is to develop a special interface for eLogbook mobile users. This interface must take into account the constraints imposed by mobile devices (such as screen size and discontinuous connectivity), when deciding what information to display, when and how to display it. The predefined user profile and the actual context will be taken into account for the adaptation.
MER : Denis Gillet
Type of project: Master
Assistant: Sandy El Helou
Student: Cyril Coquegniot (Exchange)
G015——————————————————————————–
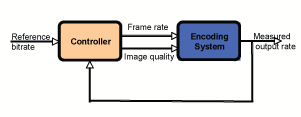
Real-time control of video output rate
Video sent through a network is typically compressed to limit bandwidth usage. The output bit-rate of an encoded video stream depends on its content. The goal of this project is to design a controller capable to adapt in real-time the output rate of a video independently of its content. The control variables are the encoding parameters (frame-rate and spatial compression factor) and the measurement signal is the bit-rate of the encoded video. The control will be implemented to send a virtual 3D scene over a wireless network.
MER : Denis Gillet
Type of project: Semester
Assistants: Damien Perritaz and Christophe Salzmann
Student: David Ingram
G020——————————————————————————–
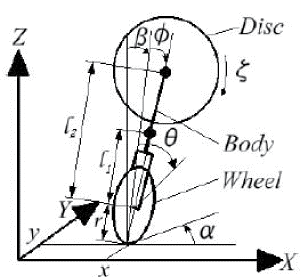
Control of a unicycle robot
The Laboratoire d’Automatique is developing an autonomous unicycle. The system is supposed to stand on a single wheel and move along trajectories. The dynamics have been modeled as a part od a previous project and a simulator is available.
The goal of this project is to control the unicycle in a given posture. The current model being complex and strongly nonlinear, alternative modeling approaches should be investigated. Once an ad hoc model will be available, a high-level controller able to move the unicycle along a trajectory will be designed.
MER : Denis Gillet
Type of project: Semester
Assistants: Damien Perritaz and Yvan Michellod and Sylvain Rudaz
Student: Daniel Block
G017——————————————————————————–
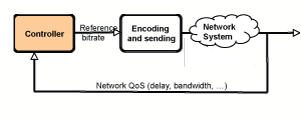
Wireless network model for QoS control
Transmissions over a wireless link are subject to large variations of the network characteristics. The network can be seen as a SIMO (Single-Input, Multi-Output) system. Its input is the sending rate and its outputs are quality of service (QoS) metrics, such as latency, loss rate or jitter. An optimal feedback loop can be implemented for maximizing the QoS. The goal of this project is to obtain a model of the wireless network transmission suitable for control. The early validation of the model and the controller will be done using an existing network simulator.
MER : Denis Gillet
Type of project: Semester
Assistants: Damien Perritaz and Christophe Salzmann
Student: Selma Soraya Aboussaoud
B011———————————————————————————
Nonlinear control of a circular pendulum
This project aims at designing a control strategy for the Furuta pendulum. The Furuta pendulum is a modification of the classical cart pendulum with the cart moving on a circular instead of a linear track. The aim is to maintain the pendulum at a non-equilibrium position, for example, at any angle other than the upright and downward positions. The scope of the project will be to model the system and design an appropriate control strategy.
Professor: Dominique Bonvin
Type of project: Semester
Assistants: Willson Shibani and Philippe Müllhaupt
Student: Fabien Fellay
G019——————————————————————————–
Analysis of a unicycle robot
The Laboratoire d’Automatique is developing an autonomous unicycle. The system is supposed to stand on a single wheel and move along trajectories. The dynamics have been modeled as part of a previous project and a simulator is available.
The goal of this project is to study the controllability and observability of the unicycle. Different actuator alternatives will be investigated. Bio-inspired solutions (moving arms), gyroscopic actuators and their combination will be compared in terms of controllability. For observability analysis, different sensing alternatives for the position and the posture determination will be investigated by simulation and in real conditions.
MER : Denis Gillet
Type of project: Semester
Assistants: Damien Perritaz and Yvan Michellod and Sylvain Rudaz
Student: Xiaolin Wang
G028———————————————————————————
Relevancy-based notification mechanism
Awareness services are essential in collaborative environments as they sustain collaboration and communication. Nevertheless, excessive events notifications might lead to adverse effects such as the decrease in productivity. Thus awareness information should be filtered based on its relevancy for a particular user in a particular context. An event’s relevancy is computed based on explicit as well as implicit input factors. The latter is inferred from the user’s interaction with the environment and so, requires a tracing of the user’s significant actions. The aim of the project is to derive a system model and use Intelligent control techniques to produce a set of relevant notifications for every user.
MER : Denis Gillet
Type of project: Semester
Assistants: Sandy El Helou and Christophe Salzmann
Student: Hajir Roozbehani
L013———————————————————————————
Continuous-time versus discrete-time control design
Consider the following possibilities to design a controller for a real system:
1. Develop a continuous-time model, convert it to a discrete-time model, compute a digital controller and apply it to the real system.
2. Develop a continuous-time model, compute a continuous-time controller, convert it to a discrete-time controller and apply it to the real system.
3. Identify a discrete-time model, convert it to a continuous-time model, compute a continuous-time controller, convert it to a discrete-time controller and apply it to the real system.
4. Identify a discrete-time model, compute a digital controller and apply it to the real system.
The goal of this project is to study and compare these different methods via simulation and application to a flexible-joint system.
Professor: Roland Longchamp
Type of project: Semester
Assistants: Hamid Khatibi and Alireza Karimi
Student: Hamed Shisheh Foroush
L014———————————————————————————

Control of a rocket using gain scheduling
A rocket cannot be controlled using classical control, because of large parameter changes (mass, pressure, …). Hence, a gain-scheduling control technique is used. This technique consists of designing several controllers for fixed operating points and interpolating between them to construct a global gain-scheduled controller. In this project, a new approach based on linear programming will be used. This approach has the particularity of designing local controllers and interpolating between them in one step.
To achieve this goal, the following steps are proposed:
1. Decouple the MIMO model of the rocket to have several SISO models.
2. Linearize the SISO models around different operating points.
3. Apply the method to design the gain-scheduled controllers.
4. Test the controllers in simulation.
Professor: Roland Longchamp
Type of project: Semester
Assistant: Marc Kunze
Student: Saurabh Indra
G029——————————————————————————–
Control of an over-actuated manipulator arm
Robots having more actuated degree-of-freedom than necessary for completely specifying the end-effector position and orientation are called redundant robots. These robots show superior flexibility over classical robots insofar as they can accommodate not only for the end effector task but also for a possible necessary change in shape caused by the appearance of an obstacle or obstruction in the surroundings of the robot. Consider a 5 rotary-joint (5R) over-actuated manipulator realizing a periodic positioning task in 3D space. It is proposed, first, to develop a graphical tool in order to generate any non-trivial integrable surface on which the robot arm will act. Then, it is proposed to design a multivariable controller on this highly-nonlinear system to track any periodic trajectory.
As stated here-above, this project is twofold:
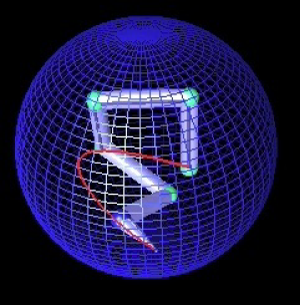
-Creation of a tool to generate any integrable surface, parametrized with 2 variables, using the Bezier or B-splines polynomial surfaces. The equation of which should be differentiable. The created surface will be used to define the working surface of an overactuated robot arm. One of the clear objectives of this subpart is to be able to represent the general part of a vehicle instead of a simple sphere as in the enclosed figure.
-Design of a general MIMO-PD controller (ie. computed torque-like control) for the 5R manipulator joints in order to track any smooth periodic trajectory on the predefined surface.
MER : Denis Gillet
Type of project: Semester
Assistants: Yvan Michellod and Philippe Mullhaupt
Student: Lionel Selosse
G023——————————————————————————–
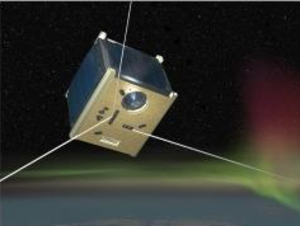
SwissCube attitude determination and control
The SwissCube is a small satellite (1kg) entirely designed by students from different universities in Switzerland.
The SwissCube attitude (orientation) is controlled through magneto-torquers acting through the local earth magnetic field and possibly an additional inertia wheel. The attitude is measured with magnetometers, gyroscopes and sun-sensors. Previous projects already assessed the questions of state feedback control/controllability of the satellite and of state observation (attitude determination) from a rather theoretical point of view.
The aim of this project is to investigate the various available approaches from an engineering point of view, i.e. evaluate what is implementable on the available hardware and how to do it. Important issues will include the interface between observer and controller, the orbit propagator, the embedded magnetic field model, the sensors and actuators.
MER : Denis Gillet
Type of project: Semester
Assistants: Basile Graf and Philippe Müllhaupt
Student: Ahmed Slama
G011——————————————————————————–
Automatic biding in online keyword auctions
The LA is investigating, in collaboration with a startup company, advanced solutions to optimize the bids and the positions of sponsored ads to be displayed by Internet search engines. Top positions may cost up to 5$ a click and attract more visitors than buyers, while low positions may not attract potential customers at all.
The goal of the project is to characterize the auction process on a single keyword from a dynamic systems point of view and to investigate basic optimization strategies for ads placement. The return on advertising spending should be maximized taking into account limited budget and a priori position preferences. The solutions proposed will be validated by simulation and then implemented for testing using the Google AdWords API.
Basic Java or PHP programming skills would be an asset.
MER : Denis Gillet
Type of project: Semester or Master
Contact: Denis Gillet
Student: Jean-Christophe Fillion