La problématique
 Nous avons commencé ce projet en menant une enquête sur le terrain dans une école professionnelle et dans 12 entreprises de logistique. Les observations et les entretiens nous ont permis d’identifier un problème central dans la formation des apprentis auquel nous nous référons en tant que « écart de compétences ».
Nous avons commencé ce projet en menant une enquête sur le terrain dans une école professionnelle et dans 12 entreprises de logistique. Les observations et les entretiens nous ont permis d’identifier un problème central dans la formation des apprentis auquel nous nous référons en tant que « écart de compétences ».
Tout d’abord, l’école est trop théorique. Alors que les enseignants font beaucoup d’efforts afin d’expliquer et de contextualiser des exemples du manuel, les apprentis ne sont pas capables (ou n’ont pas la volonté) de transposer les exemples à leur pratique. Les problèmes et exercices scolaires n’ont pas de sens s’ils ne peuvent pas être reliés à la pratique quotidienne des apprentis. Dans l’ensemble, la théorie n’est pas vue de manière favorable dans cette profession à prédominance « manuelle ».
Sur leur lieu de travail, les apprentis n’ont pas l’occasion d’utiliser les concepts de gestion qui leur sont enseignés à l’école. Les apprentis sont généralement impliqués dans le flux physique des biens : déplacer des cartons, emballer des biens, contrôler divers décomptes, mettre à jour le système de gestion de l’inventaire. Les décisions concernant l’organisation de l’entrepôt, qui demanderait l’application des théories enseignées à l’école, sont prises par le responsable de l’entrepôt ou par le département commercial sans inclure les apprentis dans le processus.
La question de recherche centrale est de trouver dans quelles conditions est-ce que les technologies de l’éducation peuvent être utilisées pour combler cet écart de compétences, c’est-à-dire de rendre possible l’intégration de concepts théoriques dans l’expérience pratique.
L’intervention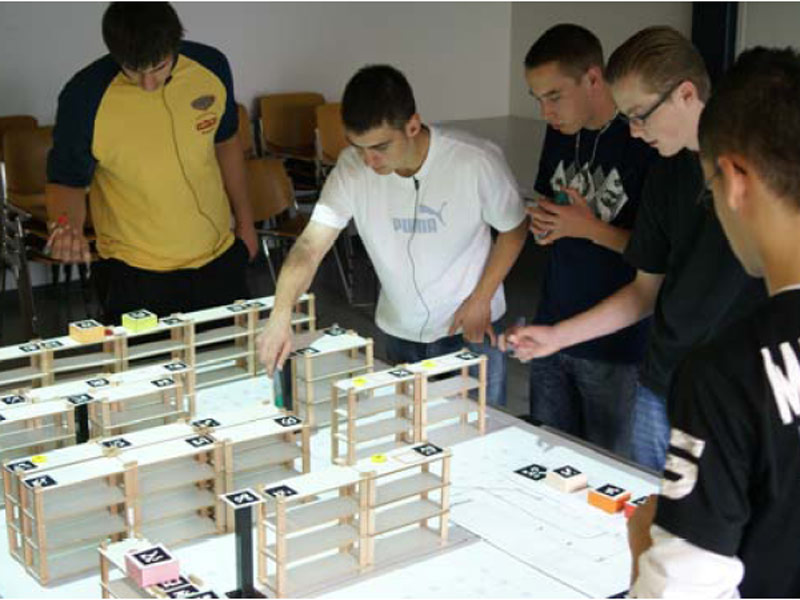
L’intervention que nous proposons consiste à utiliser des modèles réduits d’entrepôts en classe, comme une base pour des exercices de résolutions de problèmes étant proche de la pratique sur le lieu de travail. L’organisation de l’environnement d’apprentissage devrait permettre aux apprentis de mettre en pratique des compétences d’organisation et de gestion, en permettant en même temps aux enseignants de modeler des experts en résolution de problèmes en suivant les principes de l’apprentissage cognitif (Collins, Brown, & Holum, 1991) et du champs d’application (Barab & Duffy, 2000).
Nous suivons l’approche mise en évidence par le collectif Design-Based Research (2003) qui consiste à tester et à construire des théories fonctionnelles qui ont du sens dans un champ d’investigation par un design iteratif et un cycle d’interventions.
Les différents systèmes
TinkerTable
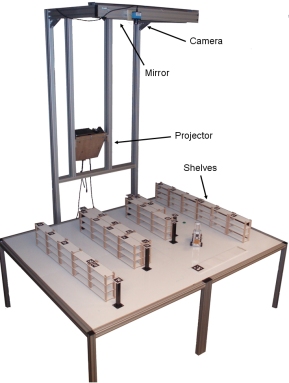
La TinkerTable est un environnement d’apprentissage « de surface » qui permet aux apprentis de construire des modèles réduits d’entrepôts en utilisant des objets physiques tels que des étagères en bois, des plateformes de chargements, des bureaux ainsi que des piliers métalliques, tous à une échelle de 1:16. Le système est constitué d’une table de 2 m sur 1.5 m recouverte par un revêtement type tableau blanc et d’une potence soutenant une caméra, un projecteur et un miroir. La caméra sert à suivre la disposition des objets sur la table et de transférer ces informations à un ordinateur sur lequel tourne une simulation de logistique. La position des objets est obtenue grâce à un marqueur repère (similaire à un code barre en 2D) détecté par le pisteur StudierStube. Le projecteur est utilisé pour projeter des informations sur la table et sur les objets, indiquant par exemple l’accessibilité au contenu de chaque étagère ou déterminant les zones de sécurité autour des obstacles. Une table Tinker est installée et utilisée à l’école professionnelle.
TinkerLamp
La TinkerLamp est une version plus légère et portable de la TinkerTable. Elle consiste en un projecteur et une caméra montés dans un cadre métallique qui est maintenu au-dessus d’une table standard par un support incurvé. Les étagères, piliers et plateformes sont à une échelle de 1:48. Les fonctionnalités de cette petite version sont identiques à part que la taille de l’entrepôt (32 m par 24 m pour la TinkerTable) est limitée à 24 m par 18 m pour la TinkerLamp. 4 TinkerLamps sont actuellement installées et utilisées dans une école professionnelle.
Simulation
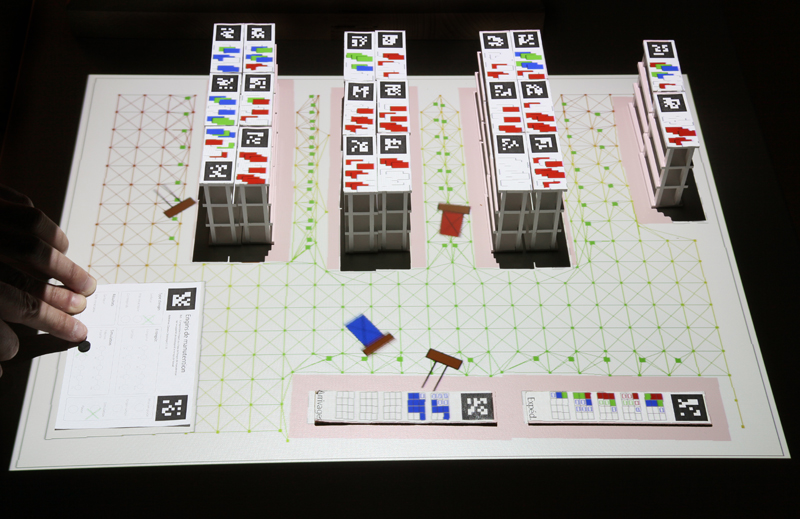
Les apprentis et leurs enseignants peuvent faire tourner des simulations sur leurs modèles d’entrepôts. Les simulations sont faites soit à une vitesse proche de la réalité (jusqu’à 10 x plus rapide) ou dans un mode rapide. En mode proche de la réalité, des chariots-élévateurs sont projetés sur la table et déplacent des boîtes virtuelles dans l’entrepôt. Le contenu des étagères est projeté sur leur dessus et les produits sont différenciés grâce à leur couleur. En mode rapide, chaque jour simulé dure seulement 2 secondes, permettant aux apprentis d’observer l’impact de leur stratégie de gestion d’entreposage sur le long terme, typiquement plusieurs mois ou plusieurs années. Plusieurs paramètres peuvent être adaptés, tel que la demande annuelle de chaque produit, le coût, l’heure des livraisons, la taille des commandes…
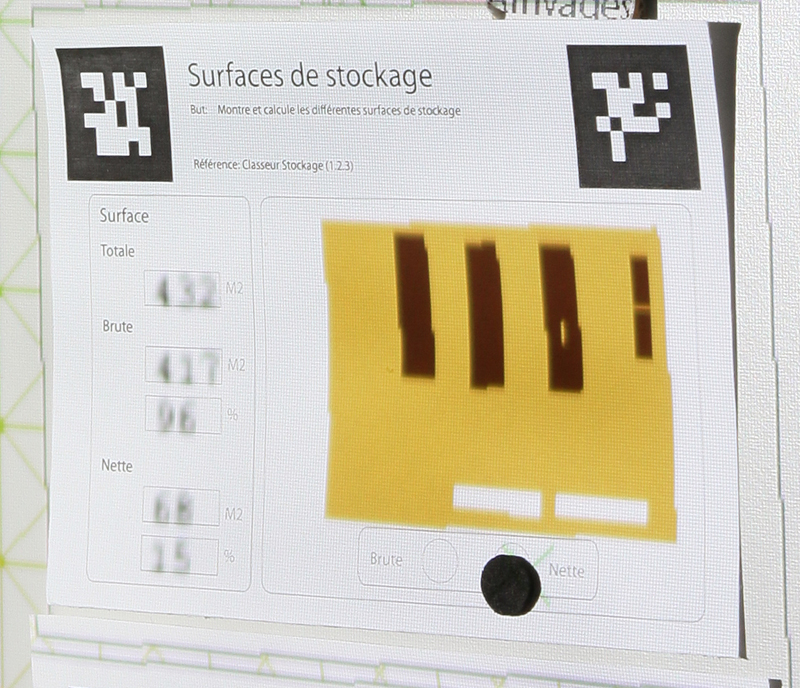
Les TinkerSheets, le dispositif principal pour les apprentis et les enseignants de régler les paramètres et de visualiser l’état de la simulation, sont une interface innovatrice basée sur la représentation d’une feuille de papier. Quatre dispositifs de base sont actuellement implémentés : des boutons et des variateurs linéaires pour les commandes, des zones de textes et de graphiques pour le feedback. Les utilisateurs interagissent avec la feuille de différente manière, en utilisant des jetons physiques (par exemple des aimants) ou un crayon pour dessiner des cercles dans une zone de commandes. Par exemple, si un apprenti désire changer la taille de l’entrepôt, il prend simplement la feuille permettant de régler ce paramètre et dépose un jeton sur le bouton imprimé (un cercle) correspondant à la valeur souhaitée. L’image ci-dessous donne un exemple d’une TinkerSheet montrant les informations à propos de la surface (aussi bien textuellement que visuellement). Deux boutons situés sous la visualisation permettent aux apprentis de choisir si c’est la surface nette ou brute qui doit être dessinée.
|
The TinkerTable |
Simulation running, controlled with a TinkerSheet
A TinkerSheet showing information about surfaces |
The TinkerLamp |

Publications
The Complementarity of Tangible and Paper Interfaces in Tabletop Environments for Collaborative Learning
Zufferey, Guillaume ; Dillenbourg, Pierre (dir.) ; Jermann, Patrick (dir.).
Ph.D. Thesis, EPFL, Lausanne, 2010.
Using Augmentations as Bridges from Concrete to Abstract Representations (PDF)
Zufferey, Guillaume, Jermann, Patrick, Do Lenh, Son and Dillenbourg, Pierre
British HCI 2009, Cambridge (UK), September 1-4, 2009.
TinkerSheets: Using Paper Forms to Control and Visualize Tangible Simulations (PDF)
Zufferey, Guillaume, Jermann, Patrick, Lucchi, Aurélien and Dillenbourg, Pierre
Third International Conference on Embedded and Tangible Interaction, Cambridge (UK), Februar 16-18, 2009.
Tinkering or Sketching: Apprentices’ Use of Tangibles and Drawings to Solve Design Problems (PDF)
Jermann, Patrick, Zufferey, Guillaume and Dillenbourg, Pierre
In: Times of Convergence. Technologies Across Learning Contexts, 2008, p. 167-178 Berlin / Heidelberg : Springer, 2008.
ISBN: 978-3-540-87604-5
A Tabletop Learning Environment for Logistics Assistants: Activating Teachers (abstract)
Zufferey, Guillaume, Jermann, Patrick and Dillenbourg, Pierre
IASTED-HCI 2008, Innsbruck, Austria, March 17-19, 2008.
In: Proceedings of the Third IASTED International Conference Human-Computer Interaction, 2008, p. 37-42 . ACTA Press, 2008.
Films
Embed of video is only possible from Mediaspace, Vimeo or Youtube
Quatre Tinkerlamps utilisés dans une salle de classe de la logistique.
Embed of video is only possible from Mediaspace, Vimeo or Youtube
Une démonstration de l’utilisation de TinkerSheets
Embed of video is only possible from Mediaspace, Vimeo or Youtube
Le TinkerTable utilisé dans une salle de e.