Master Thesis at the German Aerospace Center (DLR) in Munich
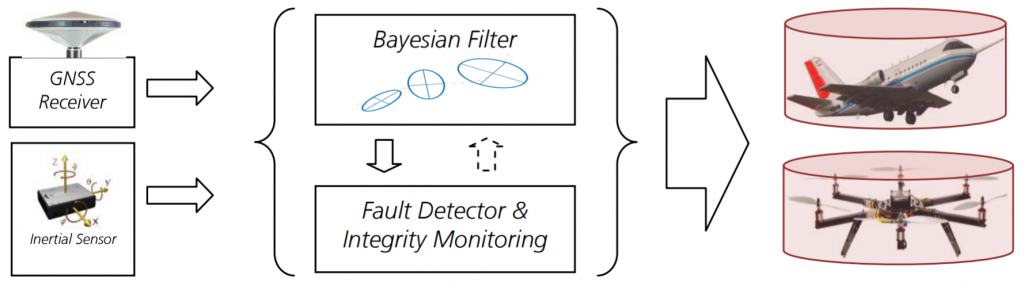
The combination of Global Navigation Satellite System (GNSS) with Inertial Navigation System (INS) has been widely used in order to improve the accuracy of a navigation solution for many transport systems. However, for safety-of-life applications and for future autonomous cars and UAVs, there are other important requirements in terms of integrity, availability or continuity. This task has been already addressed for civil aviation by integrity based systems like SBAS, GBAS or RAIM. However, due to the stringent requirements of new applications and the environment where they operate, standalone GNSS is not enough to provide a safe navigation. In this sense, it is still a remaining challenge to extend the GNSS integrity monitoring to a hybridized GNSS/INS and other sensors solution, especially in the case of low-cost sensors.
Your mission will address one or several of the following points related to the GNSS/INS/+ integration depending on the student background:
- Threat space analysis of possible sensors (Inertial, magnetometer, barometer, …)
- Design of a suitable Bayesian filter to provide realistic confidence intervals
- Analysis of different fault detection strategies
- Derivation of protection levels and integrity risk assessment
- Validation with simulations and real data (e.g. aircraft) the proposed/studied algorithms
- Implementation of proposed algorithms in UAV hardware
Recommended type of project:
Master thesis / Semester project (master students)
Work breakdown:
30% theory, 40% software, 30% experimentation
Prerequisites:
Background in GNSS and Inertial systems, knowledge of Matlab, willing to spend 6 months in Germany
Remuneration:
The student will receive a monthly remuneration to compensate for de-localization costs.
Keywords:
GNSS, INS, Integrity, Fault detection