Evolutionary robotics takes inspiration from natural evolution to automatically design robot bodies and brains (neural networks) and to understand evolution of living systems. From an artificial intelligence perspective, we are interested in open-ended evolution, evolution of multi-cellular soft robots, and evolution of swarming systems. From a biological perspective, we are interested in understanding the evolutionary emergence and principles of cooperation, competition, division of labour, and communication.
We are also interested in promoting the understanding and study of evolution by means of software and hardware educational tools. We developed RoboGen™, an open-source software for the co-evolution of neural controllers and body shapes in physics-based simulations where evolved body parts can be 3D-printed and assembled with low-cost, off-the-shelf electronic components.
Featured Paper
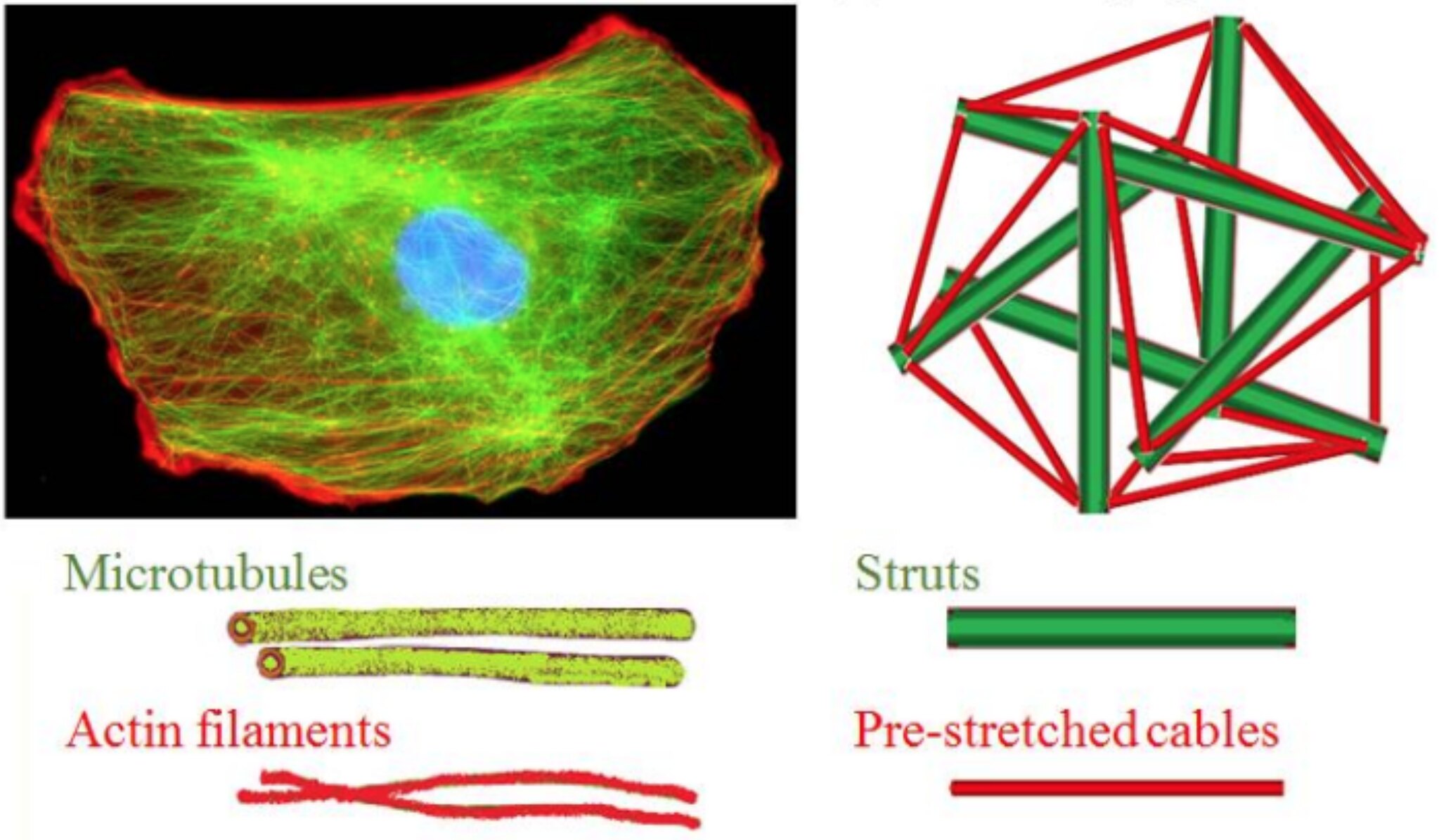
Bio-inspired Tensegrity Soft Modular Robots – Infoscience – link
Embed of video is only possible from Mediaspace, Vimeo or Youtube
Related Publications
2025
Evolutionary Codesign and Fabrication of Tensegrity Joints with Integrated Pneumatic Artificial Muscles
Advanced Intelligent Systems. 2025. DOI : 10.1002/aisy.202500310.2024
Fast ground-to-air transition with avian-inspired multifunctional legs
Nature. 2024. Vol. 636, p. 86 – 91. DOI : 10.1038/s41586-024-08228-9.Co-existence of two selves: Peripersonal space dynamically remaps around two distinct locations.
2024
Co-Design Optimisation of Morphing Topology and Control of Winged Drones
2024. IEEE International Conference on Robotics and Automation (ICRA), Yokohama, Japan, May 13th – 17th, 2024. p. 8679 – 8685. DOI : 10.1109/ICRA57147.2024.10611506.2023
The evolution of behavioral cues and signaling in displaced communication
PLoS Computational Biology. 2023. Vol. 19, num. 3, p. e1010487. DOI : 10.1371/journal.pcbi.1010487.2022
Model Predictive Control of Aerial Swarms
Lausanne, EPFL, 2022.2021
Predictive control of aerial swarms in cluttered environments
Nature Machine Intelligence. 2021. Vol. 3, p. 545 – 554. DOI : 10.1038/s42256-021-00341-y.Variable-Stiffness Tensegrity Modular Robots
Lausanne, EPFL, 2021.Seeking Quality Diversity in Evolutionary Co-design of Morphology and Control of Soft Tensegrity Modular Robots
2021. The Genetic and Evolutionary Computation Conference (GECCO 2021), Lille, France (virtual conference), July 10-14, 2021. DOI : 10.1145/3449639.3459311.2019
Learning Vision-based Flight in Drone Swarms by Imitation
IEEE Robotics and Automation Letters. 2019. Vol. 4, num. 4, p. 4523 – 4530. DOI : 10.1109/LRA.2019.2935377.Inquiry-Based Learning with RoboGen: An Open-Source Software and Hardware Platform for Robotics and Artificial Intelligence
IEEE Transactions on Learning Technologies. 2019. Vol. 12, num. 3, p. 356 – 369. DOI : 10.1109/TLT.2018.2833111.The influence of limited visual sensing on the Reynolds flocking algorithm
2019. The Third IEEE International Conference on Robotic Computing, Naples, Italy, February 25-27, 2019. DOI : 10.1109/IRC.2019.00028.2017
Bio-inspired Tensegrity Soft Modular Robots
2017. Living Machines 2017, Palo Alto, California, USA, July 25-28, 2017. p. 497 – 508. DOI : 10.1007/978-3-319-63537-8_42.Climbing favours the tripod gait over alternative faster insect gaits
Nature Communications. 2017. Vol. 8, p. 14494. DOI : 10.1038/ncomms14494.Disentangling constraints using viability evolution principles in integrative modeling of macromolecular assemblies
Scientific Reports. 2017. Vol. 7, p. 235. DOI : 10.1038/s41598-017-00266-w.2016
The Seamless Peer and Cloud Evolution Framework
2016. GECCO ’16, Denver, Colorado, USA, 20-24 07 2016. p. 821 – 828. DOI : 10.1145/2908812.2908886.Gaining Insight into Quality Diversity
2016. GECCO ’16, Denver, Colorado, USA, 20-24 07 2016. p. 1061 – 1064. DOI : 10.1145/2908961.2931675.Memetic Viability Evolution for Constrained Optimization
IEEE Transactions on Evolutionary Computation. 2016. Vol. 20, num. 1, p. 125 – 144. DOI : 10.1109/TEVC.2015.2428292.Evolutionary Robotics
Handbook of Robotics; Berlin: Springer Verlag, 2016. p. 2035 – 2068.2015
Fluctuation-driven neural dynamics reproduce Drosophila locomotor patterns
Plos Computational Biology. 2015. Vol. 11, num. 11, p. e1004577. DOI : 10.1371/journal.pcbi.1004577.Mechanosensory interactions drive collective behaviour in Drosophila
Nature. 2015. Vol. 519, p. 233 – 236. DOI : 10.1038/nature14024.Viability evolutionary algorithms and applications to neuroscience and biology
Lausanne, EPFL, 2015.Rapid Evolution of Robot Gaits
2015. GECCO ’15, Madrid, Spain, July 11-15, 2015. p. 743 – 744. DOI : 10.1145/2739482.2764894.2014
Viability Principles for Constrained Optimization Using a (1+1)-CMA-ES
2014. 13th International Conference on Parallel Problem Solving From Nature, Ljubljana, Slovenia, September 13-17, 2014. p. 272 – 281. DOI : 10.1007/978-3-319-10762-2_27.Evolving Cooperation: From Biology to Engineering
The Horizons of Evolutionary Robotics; Cambridge, MA: MIT Press, 2014. p. 203 – 217.Soft Cells for Modular Robots
Lausanne, EPFL, 2014.Soft Cells for Programmable Self-Assembly of Robotic Modules
Soft Robotics. 2014. Vol. 1, num. 4, p. 239 – 245. DOI : 10.1089/soro.2014.0005.RoboGen: Robot Generation through Artificial Evolution
2014. Artificial Life 14: International Conference on the Synthesis and Simulation of Living Systems, New York, NY, USA, July 30-August 2, 2014. p. 136 – 137. DOI : 10.7551/978-0-262-32621-6-ch022.From Genes to Organisms : Bioinformatics System Models and Software
Lausanne, EPFL, 2014.Robotics and Neuroscience
Current Biology. 2014. Vol. 24, p. R910 – R920. DOI : 10.1016/j.cub.2014.07.058.Online Extreme Evolutionary Learning Machines
2014. Artificial Life 14: International Conference on the Synthesis and Simulation of Living Systems, New York, NY, USA, July 30-August 2, 2014. p. 465 – 472. DOI : 10.7551/978-0-262-32621-6-ch076.Takashi Gomi and the evolution of embodied AI
Adaptive Behavior. 2014. p. 1059712314553807. DOI : 10.1177/1059712314553807.Programmable Self-assembly with Chained Soft Cells: An Algorithm to Fold into 2-D Shapes
2014. Simulation of Adaptive Behavior 2014, Castellón, Spain, July 22-26, 2014. p. 220 – 229. DOI : 10.1007/978-3-319-08864-8_21.Selection methods regulate evolution of cooperation in digital evolution
Journal of the Royal Society Interface. 2014. Vol. 11, num. 90, p. 20130743. DOI : 10.1098/rsif.2013.0743.Artificial Evolution by Viability Rather Than Competition
PLOS One. 2014. Vol. 9, num. 1, p. e86831. DOI : 10.1371/journal.pone.0086831.2013
Evolving team compositions by agent swapping
IEEE Transactions on Evolutionary Computation. 2013. Vol. 17, num. 2, p. 282 – 298. DOI : 10.1109/TEVC.2012.2191292.Soft Cell Simulator: A tool to study Soft Multi-Cellular Robots
2013. IEEE International Conference on Robotics and Biomimetics, Shenzhen, China, December 12-14, 2013. p. 1300 – 1305. DOI : 10.1109/ROBIO.2013.6739644.Using robots to understand social behavior
Biological Reviews. 2013. num. 88, p. 31 – 39. DOI : 10.1111/j.1469-185X.2012.00236.x.Evolution of division of labor in artificial societies
Lausanne, EPFL, 2013.2012
Historical contingency affects signaling strategies and competitive abilities in evolving populations of simulated robots
Proceedings Of The National Academy Of Sciences Of The United States Of America (PNAS). 2012. Vol. 109, num. 3, p. 864 – 868. DOI : 10.1073/pnas.1104267109.Differences in the Concept of Fitness Between Artificial Evolution and Natural Selection
2012. Artificial Life 13, the Thirteenth International Conference on the Simulation and Synthesis of Living Systems, East Lansing, Michigan, USA, July 19-22, 2012. p. 530 – 531.Limitations of response thresholds models of division of labor
2012. Artificial Life 13, the Thirteenth International Conference on the Simulation and Synthesis of Living Systems, East Lansing, Michigan, USA, July 19-22, 2012. p. 561 – 562.Neural networks as mechanisms to regulate division of labor
The American Naturalist. 2012. Vol. 179, num. 3, p. 391 – 400. DOI : 10.1086/664079.Fluorescence Behavioral Imaging (FBI) tracks identity in heterogeneous groups of Drosophila
PLOS One. 2012. Vol. 7, num. 11, p. e48381. DOI : 10.1371/journal.pone.0048381.2011
myCopter: Enabling Technologies for Personal Air Transport Systems
2011. RAeS Rotorcraft Conference: The Future Rotorcraft – Enabling Capability Through the Application of Technology, London, UK, 15-16th June 2011.Beyond Graphs: A New Synthesis
Journal of Computational Science. 2011. Vol. 2, num. 2, p. 165 – 177. DOI : 10.1016/j.jocs.2011.01.007.Robot Companions for Citizens
2011. FET’11, Budapest, p. 47 – 51. DOI : 10.1016/j.procs.2011.12.017.A Quantitative Test of Hamilton’s Rule for the Evolution of Altruism
PLOS Biology. 2011. Vol. 9, num. 5, p. e1000615. DOI : 10.1371/journal.pbio.1000615.myCopter – Enabling Technologies for Personal Aerial Transportation Systems
2011. International HELI World Conference, Frankfurt/Main, Germany, 2011.myCopter – Enabling Technologies for Personal Aerial Transportation Systems.
2011. European Rotorcraft Forum, Vergiate/Gallarate, Italy, September 13-15, 2011.GeneNetWeaver: In silico benchmark generation and performance profiling of network inference methods
Bioinformatics. 2011. Vol. 27, num. 16, p. 2263 – 2270. DOI : 10.1093/bioinformatics/btr373.Genetic Representation of Adaptive Neural Controllers
Lausanne, EPFL, 2011.Reynolds flocking in reality with fixed-wing robots: communication range vs. maximum turning rate
2011. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS’2011), San Francisco, September 25-30, 2011. p. 5015 – 5020. DOI : 10.1109/IROS.2011.6095129.Relatedness influences signal reliability in evolving robots
Proceedings of the Royal Society B. 2011. Vol. 278, p. 378 – 383. DOI : 10.1098/rspb.2010.1407.2010
Task-dependent influence of genetic architecture and mating frequency on division of labour in social insect societies
Behavioral Ecology and Sociobiology. 2010. Vol. 64, p. 675 – 684. DOI : 10.1007/s00265-009-0885-4.Swarm Intelligence. Proceedings of the 7th International Conference, ANTS 2010
2010.Communication-based Swarming for Flying Robots
International Workshop on Self-Organized Systems, Zürich, Switzerland, December 9-11.Evolutionary Synthesis of Communication-Based Aerial Swarms
Lausanne, EPFL, 2010.GeneNetWeaver 3.0: realistic benchmark generation and performance profiling of network inference methods
3rd annual joint conference on Systems Biology, Regulatory Genomics, and Reverse Engineering Challenges, New York City, USA, November 16-20, 2010.Communication-based Swarming for Flying Robots
2010. IEEE International Conference on Robotics and Automation, Workshop on Network Science and Systems Issues in Multi-Robot Autonomy, Anchorage, Alaska, May 7, 2010.Genetic representation and evolvability of modular neural controllers
IEEE Computational Intelligence Magazine. 2010. Vol. 5, num. 3, p. 10 – 19. DOI : 10.1109/MCI.2010.937319.Insect Vision: A Few Tricks to Regulate Flight Altitude
Current Biology. 2010. Vol. 20, num. 19, p. R847 – R849. DOI : 10.1016/j.cub.2010.08.022.Evolving Cooperation: From Biology to Engineering
The Horizons of Evolutionary Robotics; Cambridge, USA: MIT Press, 2010.GeneNetWeaver 3.0: realistic benchmark generation and performance profiling of network inference methods
All-SystemsX.ch-Day 2010, Geneva, Switzerland, November 1-2, 2010.Revealing strengths and weaknesses of methods for gene network inference
Proceedings Of The National Academy Of Sciences Of The United States Of America (PNAS). 2010. Vol. 107, num. 14, p. 6286 – 6291. DOI : 10.1073/pnas.0913357107.Evolution of Adaptive Behaviour in Robots by Means of Darwinian Selection
PLOS Biology. 2010. Vol. 8, num. 1, p. e100029. DOI : 10.1371/journal.pbio.1000292.2009
The e-puck, a Robot Designed for Education in Engineering
2009. 9th Conference on Autonomous Robot Systems and Competitions, Castelo Branco, Portugal, May 7, 2009. p. 59 – 65.2.5D Infrared Range and Bearing System for Collective Robotics
2009. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS’2009), St. Louis, October 10-15, 2009. p. 3659 – 3664. DOI : 10.1109/IROS.2009.5354263.A Robotic Platform for Studying the Evolution of Communication
Evolution of Communication and Language in Embodied Agents; Berlin: Springer Verlag, 2009. p. 303 – 306.Towards a self-deploying and gliding robot
Flying Insects and Robots; Berlin: Springer Berlin Heidelberg, 2009. p. 271 – 284.Methods for Artificial Evolution of Truly Cooperative Robots
2009. International Workshop on Artificial Neural Network 2009, Salamanca, Spain, June 10-12, 2009. p. 768 – 772. DOI : 10.1007/978-3-642-02478-8_96.Genetic Team Composition and Level of Selection in the Evolution of Cooperation
IEEE Transactions on Evolutionary Computation. 2009. Vol. 13, num. 3, p. 648 – 660. DOI : 10.1109/TEVC.2008.2011741.Evolved swarming without positioning information: an application in aerial communication relay
Autonomous Robots. 2009. Vol. 26, num. 1, p. 21 – 32. DOI : 10.1007/s10514-008-9104-9.Evolutionary Conditions for the Emergence of Communication
Evolution of Communication and Language in Embodied Agents; Berlin: Springer Verlag, 2009. p. 123 – 134.Combining Multiple Results of a Reverse Engineering Algorithm: Application to the DREAM Five Gene Network Challenge
Annals of the New York Academy of Sciences. 2009. Vol. 1158, p. 102 – 113. DOI : 10.1111/j.1749-6632.2008.03945.x.Active Vision for Goal-Oriented Humanoid Robot Walking
Creating Brain-Like Intelligence; Springer-Verlag, 2009. p. 303 – 313.Evolutionary reverse engineering of gene networks
Lausanne, EPFL, 2009.Replaying the Evolutionary Tape: Biomimetic Reverse Engineering of Gene Networks
Annals of the New York Academy of Sciences. 2009. Vol. 1158, p. 234 – 245. DOI : 10.1111/j.1749-6632.2008.03944.x.The Evolution of Information Suppression in Communicating Robots with Conflicting Interests
Proceedings Of The National Academy Of Sciences Of The United States Of America (PNAS). 2009. Vol. 106, num. 37, p. 15786 – 15790. DOI : 10.1073/pnas.0903152106.Reverse-engineering of Artificially Evolved Controllers for Swarms of Robots
2009. IEEE Congress on Evolutionary Computation, Trondheim, Norway, May 18-21, 2009. p. 55 – 61. DOI : 10.1109/CEC.2009.4982930.Evolutionary Selection of Features for Neural Sleep/Wake Discrimination
Journal of Artificial Evolution and Applications. 2009. Vol. 2009, p. 1 – 10. DOI : 10.1155/2009/179680.The evolution of communication in robot societies
Lausanne, EPFL, 2009.2008
Enactive Robot Vision
Adaptive Behavior. 2008. Vol. 16, num. 2-3, p. 122 – 128. DOI : 10.1177/1059712308089183.Evolution of Altruistic Robots
Computational Intelligence: Research Frontiers; Heidelberg: Springer Verlag, 2008. p. 232 – 248.Evolvability of Neuromodulated Learning for Robots
2008. The 2008 ECSIS Symposium on Learning and Adaptive Behavior in Robotic Systems, Edinburgh, Scotland, August 6-8, 2008. p. 41 – 46. DOI : 10.1109/LAB-RS.2008.22.The Age of Analog Networks
AI Magazine. 2008. Vol. 29, num. 3, p. 63 – . DOI : 10.1609/aimag.v29i3.2156.Bio-Inspired Artificial Intelligence: Theories, Methods, and Technologies
Cambridge, MA: MIT Press, 2008.Evolutionary Advantages of Neuromodulated Plasticity in Dynamic, Reward- based Scenarios
2008. Artificial Life XI, Winchester UK, 5-8 August 2008. p. 569 – .Scalable Reverse Engineering of Nonlinear Gene Networks
Exhibition of the Master projects, EPFL, Lausanne, Switzerland, March 7, 2008.Neuroevolution: from architectures to learning
Evolutionary Intelligence. 2008. Vol. 1, num. 1, p. 47 – 62. DOI : 10.1007/s12065-007-0002-4.Evolutionary Robotics
Handbook of Robotics; Berlin: Springer Verlag, 2008.2007
Evolutionary Swarms of Flying Robots
2007. International Symposium on Flying Insects and Robots, Monte Verità, Switzerland, Monte Verità, Locarno, Switzerland, August 12-17.Pheromone-based Swarming for Position-less MAVs
Flying Insects and Robots Symposium, Monte-Verità, Ascona, Switzerland, 12-17 August.Method and device for the genetic representation and evolution of networks
US2007011111; US7370019.
2007.Evolving Neuromodulatory Topologies for Reinforcement Learning-like Problems
2007. IEEE Congress on Evolutionary Computation (CEC 2007) 25-28 Sept. 2007, Singapore, September 25-28, 2007. p. 2471 – 2478. DOI : 10.1109/CEC.2007.4424781.Evolutionary Conditions for the Emergence of Communication in Robots
Current Biology. 2007. Vol. 17, p. 514 – 519. DOI : 10.1016/j.cub.2007.01.058.Bio-mimetic Evolutionary Reverse Engineering of Genetic Regulatory Networks
2007. 5th European Conference on Evolutionary Computation, Machine Learning and Data Mining in Bioinformatics (EvoBIO 2007), València, 11.4.-13.4.07. p. 155 – 165. DOI : 10.1007/978-3-540-71783-6_15.Center of Mass Encoding: A self-adaptive representation with adjustable redundancy for real-valued parameters
2007. GECCO 2007, University College, London, 2007. p. 1304 – . DOI : 10.1145/1276958.1277205.Analog Genetic Encoding for the Evolution of Circuits and Networks
IEEE Transactions on Evolutionary Computation. 2007. Vol. 11, num. 5, p. 596 – . DOI : 10.1109/TEVC.2006.886801.Evolutionary morphogenesis for multi-cellular systems
Genetic Programming and Evolvable Machines. 2007. Vol. 8, num. 1, p. 61 – 96. DOI : 10.1007/s10710-006-9019-1.Evolution of cooperation in artificial ants
Lausanne, EPFL, 2007.Enactive robot vision
Lausanne, EPFL, 2007.2006
Division of labour and colony efficiency in social insects: effects of interactions between genetic architecture, colony kin structure and rate of perturbations
Proceedings of the Royal Society B. 2006. Vol. 273, p. 1815 – 23. DOI : 10.1098/rspb.2006.3513.Flying over the Reality Gap: From Simulated to Real Indoor Airships
Autonomous Robots. 2006. Vol. 21, num. 3, p. 243 – 254. DOI : 10.1007/s10514-006-9718-8.Evolution of Spiking Neural Circuits in Autonomous Mobile Robots
International Journal of Intelligent Systems. 2006. Vol. 21, num. 9, p. 1005 – 1024. DOI : 10.1002/int.20173.Active Vision for Neural Development and Landmark Navigation
2006. 50th Anniversary Summit of Artificial Intelligence, Monte Verità, Switzerland, 9-14 July 2006. p. 247 – 248.Omnidirectional Active Vision for Evolutionary Car Driving
2006. The Ninth International Conference on Intelligent Autonomous Systems, Tokyo, Japan, 7-9 March 2006. p. 153 – .Evolutionary Active Vision Toward Three Dimensional Landmark-Navigation
2006. From Animals to Animats 9: The Ninth International Conference on the Simulation of Adaptive Behavior, Roma, Italy, 25-29 September 2006. p. 263 – . DOI : 10.1007/11840541_22.Artificial Life X
2006. Tenth International Conference on the Simulation and Synthesis of Living Systems.Trends in Dynamic and Embodied Cognition
International Neural Network Society Newsletter. 2006. Vol. 4, num. 2, p. 9 – .Influence of the level of polyandry and genetic architecture on division of labour
2006. The Tenth International Conference on the Simulation and Synthesis of Living Systems, Bloomington, IN, June 3-7, 2006. p. 358 – 364.Dynamical principles for neuroscience and intelligent biomimetic devices
2006. EPFL LATSIS Symposium 2006.Active Vision and Neural Development in Animals and Robots
2006. The Seventh International Conference on Cognitive Modeling, Trieste, Italy, 5-8 April 2006. p. 10 – .Neuroevolution with Analog Genetic Encoding
2006. 9th Conference on Parallel Problem Solving from Nature (PPSN iX), Reykjavik, Iceland, 9-13 September 2006. p. 671 – . DOI : 10.1007/11844297_68.2005
Evolutionary synthesis of analog networks
Lausanne, EPFL, 2005.Co-evolution of Structures and Controllers for Neubot Underwater Modular Robots
2005. 8th European Conference on Artificial Life (ECAL’2005), Canterbury, Kent (UK), 5-9 September. p. 189 – 199. DOI : 10.1007/11553090_20.The SWARM-BOTS Project
Künstliche Intelligenz. 2005. p. 32 – 35.Superlinear Physical Performances in a SWARM-BOT
2005. 8th European Conference on Artificial Life (ECAL’2005), Canterbury, Kent (UK), 5-9 September. p. 282 – 291. DOI : 10.1007/11553090_29.Active Vision and Receptive Field Development in Evolutionary Robots
Evolutionary Computation. 2005. Vol. 13, num. 4, p. 527 – . DOI : 10.1162/106365605774666912.Bio-inspired vision-based flying robots
Lausanne, EPFL, 2005.The cooperation of swarm-bots: physical interactions in collective robotics
IEEE Robotics & Automation Magazine. 2005. Vol. 12, num. 2, p. 21 – 28. DOI : 10.1109/MRA.2005.1458313.Constraints on Body Movement during Visual Development Affect Behavior of Evolutionary Robots
2005. The International Joint Conference on Neural Networks, Montreal, Canada, 31 July-4 August 2005. p. 2778 – . DOI : 10.1109/IJCNN.2005.1556365.Multi-cellular reconfigurable circuits : evolution, morphogenesis and learning
Lausanne, EPFL, 2005.From Wheels to Wings with Evolutionary Spiking Neurons
Artificial Life. 2005. Vol. 11, num. 1-2, p. 121 – 138. DOI : 10.1162/1064546053278900.The Contribution of Active Body Movement to Visual Development in Evolutionary Robots
Neural Networks. 2005. Vol. 18, num. 5/6, p. 656 – . DOI : 10.1016/j.neunet.2005.06.043.2004
Optic-flow-based Navigation for Ultralight Indoor Aircraft
Insect Sensors and Robotics, Brisbane, Australia, 23-26 August 2004.Coevolution of active vision and feature selection
Biological Cybernetics. 2004. Vol. 90, num. 3, p. 218 – . DOI : 10.1007/s00422-004-0467-5.Hardware morphogenetic developmental system
2004
Measures of Diversity for Populations and Distances Between Individuals with Highly Reorganizable Genomes
Evolutionary Computation. 2004. Vol. 12, num. 4, p. 495 – . DOI : 10.1162/1063656043138923.Machine Self-Evolution
YLEM journal. 2004. Vol. 24, num. 12, p. 4 – 10.Evolving Self-Organizing Behaviors for a Swarm-bot
Autonomous Robots. 2004. Vol. 17, num. 2-3, p. 223 – 245. DOI : 10.1023/B:AURO.0000033973.24945.f3.Connecting Transistors and Proteins
2004. 9th International Conference on Artificial Life (Alife9), Boston (MA), p. 9 – 14.The SWARM-BOTS project
2004. Swarm Robotics (SAB’2004), Santa Monica, CA, USA, July 17. p. 31 – 44. DOI : 10.1007/978-3-540-30552-1_4.Evolution of Analog Networks using Local String Alignment on Highly Reorganizable Genomes
2004. NASA/DoD Conference on Evolvable Hardware (EH’2004), Seattle, 24-26 June. p. 30 – 37.SWARM-BOT: a New Distributed Robotic Concept
Autonomous Robots. 2004. Vol. 17, num. 2-3, p. 193 – 221. DOI : 10.1023/B:AURO.0000033972.50769.1c.Physical connections and cooperation in swarm robotics
2004. 8th Conference on Intelligent Autonomous Systems (IAS8), Amsterdam, NL, March 10-14. p. 53 – 60.Genetic and Evolutionary Computation – GECCO 2004
2004. Genetic and Evolutionary Computation Conference.Evolution of Embodied Intelligence
Embodied Artificial Intelligence; Berlin: Springer Verlag, 2004. p. 293 – 311.2003
Hardware spiking neural network with run-time reconfigurable connectivity in an autonomous robot
2003. NASA/DoD Conference on Evolvable Hardware (EH’2003), Chicago, Illinois, USA, July 9-11. p. 189 – 198. DOI : 10.1109/EH.2003.1217666.Evolving Spiking Neurons from Wheels to Wings
2003. 3rd International Symposium on Human and Artificial Intelligence Systems (HART’2002), Fukui, Japan, December 6-7, 2002. p. 65 – 70.Viability Evolution: Elimination and Extinction in Evolutionary Computation
2003
A Morphogenetic Evolutionary System: Phylogenesis of the POEtic Circuit
2003. 5th International Conference on Evolvable Systems (ICES’2003), Trondheim, Norway, 17-20 March. p. 153 – 164. DOI : 10.1007/3-540-36553-2_14.Swarm-Bots: Swarm of Mobile Robots able to Self-Assemble and Self-Organize
Ercim News. 2003. num. 53, p. 25 – 26.SWARM-BOT: From Concept to Implementation
2003. International Conference on Intelligent Robots and Systems (IROS’2003). p. 1626 – 1631. DOI : 10.1109/IROS.2003.1248877.Complex Visual Behavior with Simple Brains: Co-evolutionary Active Vision and Feature Selection
2003. European Cognitive Science Conference, Osnabrück, Germany, 10-13 September. DOI : 10.4324/9781315782362-9.POEtic Tissue: An Integrated Architecture for Bio-inspired Hardware
2003. 5th International Conference, ICES 2003, Trondheim, Norway, March 17–20, 2003. p. 129 – 140. DOI : 10.1007/3-540-36553-2_12.Vision-based Navigation from Wheels to Wings
2003. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS’2003). p. 2968 – 2973. DOI : 10.1109/IROS.2003.1249322.Exploring the T-Maze: Evolving Learning-Like Robot Behaviors using CTRNNs
2003. 2nd European Workshop on Evolutionary Robotics (EvoRob’2003), Essex, UK, 14-16 April. p. 593 – 604. DOI : 10.1007/3-540-36605-9_54.Effects of group composition and level of selection in the evolution of cooperation in artificial ants
2003. 7th European Conference on Artificial Life (ECAL’2003). p. 128 – 137. DOI : 10.1007/978-3-540-39432-7_14.2002
SWARM Robotics: A Different Approach to Service Robotics
2002. 33rd International Symposium on Robotics (ISR’2002), Stockholm, Sweden, October 7-11. p. 71 – 76.Active Vision and Feature Selection in Evolutionary Behavioral Systems
2002. The Seventh International Conference on Simulation of Adaptive Behavior, Edinburgh, UK, 5 – 9 August. p. 247 – .Trends in Evolutionary Robotics
Proceedings of the 2002 Interdisciplinary College; Bremen: Arendtap Publishing, 2002. p. 314 – 333.Neural Synthesis of Artificial Organisms through Evolution
Trends in Cognitive Sciences. 2002. Vol. 6, num. 1, p. 31 – 37. DOI : 10.1016/S1364-6613(00)01812-X.Ago Ergo Sum
Consciousness Evolving; Amsterdam: John Benjamins Publishing, 2002. p. 181 – 204.From Animals to Animats 7
2002. 7th International Conference on Simulation of Adaptive Behavior.Evolving Vision-based Flying Robots
2002. 2nd International Workshop on Biologically Motivated Computer Vision (BMCV’2002), Tübingen, November 22 – 24, 2002. p. 592 – 600. DOI : 10.1007/3-540-36181-2_59.Manuale sulle Reti Neurali
Bologna: Il Mulino, 2002.SWARM-BOT: A Swarm of Autonomous Mobile Robots with Self-Assembling Capabilities
2002. Workshop on Self-Organisation and Evolution of Social Behaviour, Monte Verità, Ascona, Switzerland, September 8-13. p. 11 – 22.Levels of Dynamics and Adaptive Behavior in Evolutionary Neural Controllers
2002. 7th International Conference on Simulation on Adaptive Behavior (SAB’2002), Edinburgh, UK, 4 – 9 – 11 August.Evolutionary Bits’n’Spikes
2002. 8th International Conference on the Simulation and Synthesis of Living Systems (Alife 8), Sydney, NSW, Australia, 9-13 December.SWARM-BOT: Pattern Formation in a Swarm of Self-Assembling Mobile Robots
2002. IEEE International Conference on Systems, Man and Cybernetics, Hammamet, Tunisia, October 6-9. p. 145 – 150. DOI : 10.1109/ICSMC.2002.1173259.2001
Evolution of Plastic Control Networks
Autonomous Robots. 2001. Vol. 11, num. 3, p. 311 – 317. DOI : 10.1023/A:1012459627968.Co-Evolution and Ontogenetic Change in Competing Robots
Advances in the Evolutionary Synthesis of Intelligent Agents; Cambridge (MA): MIT Press, 2001.Evolution of Spiking Neural Controllers for Autonomous Vision-based Robots
Evolutionary Robotics. From Intelligent Robotics to Artificial Life; Berlin: Springer-Verlag, 2001. p. 38 – 61.Transitive choices by a simple, fully connected, backpropagation neural network: implications for the comparative study of transitive inference
Animal Cognition. 2001. Vol. 4, p. 61 – 68. DOI : 10.1007/s100710100092.Neural Morphogenesis, Synaptic Plasticity, and Evolution
Theory in Biosciences. 2001. Vol. 120, num. 3-4, p. 225 – 240. DOI : 10.1078/1431-7613-00042.Evolution of Adaptive Synapses: Robots with Fast Adaptive Behavior in New Environments
Evolutionary Computation. 2001. Vol. 9, num. 4, p. 495 – 524. DOI : 10.1162/10636560152642887.An Evolutionary Active-Vision System
2001. The 2001 Congress on Evolutionary Computation, Seoul, South Korea, 05/27/2001 – 05/30/2001. p. 107 – .Evolutionary Robotics. The Biology, Intelligence, and Technology of Self-organizing Machines
Cambridge, MA: MIT Press, 2001.2000
Evolutionary Robotics: Coping with Environmental Change
2000. Genetic and Evolutionary Computation Conference (GECCO’2000), Las Vegas, Nevada, USA, July 8 – 12.Evolutionary robotics: developing robots through artificial evolution
ERCIM News. 2000. Vol. 42, p. 12 – 13.Artificial Evolution of Robust Adaptive Software: An Application to Autonomous Robots
2000. 3rd International Conference on Human and Computer (HC’2000), Aizu, Japan,Evolutionary adaptive robots : artificial evolution of adaptation mechanisms for autonomous agents
Lausanne, EPFL, 2000.Artificial Evolution of Adaptive Software: An Application to Autonomous Robots
3D The Journal of Three dimensional images (in japanese). 2000. Vol. 14, num. 4, p. 64 – 69.Evolutionary On-Line Self-Organization of Autonomous Robots
2000. 5th International Conference on Artificial Life and Robotics (AROB’2000), Oita University, Japan,Evolutionary Robots with Fast Adaptive Behavior in New Environments
2000. 3rd International Conference on Evolvable Systems (ICES’2000). p. 241 – 251. DOI : 10.1007/3-540-46406-9_24.From Animals to Animats 6
2000. 6th International Conference on Simulation of Adaptive Behavior.Evolutionary Robotics: The Next Generation
Evolutionary Robotics III; Ontario (Canada): AAI Books, 2000.Evolutionary Robots with on-line self-organization and behavioral fitness
Neural Networks. 2000. Vol. 13, num. 4-5, p. 431 – 443. DOI : 10.1016/S0893-6080(00)00032-0.1999
Advances in Artificial Life
1999. 5th European Conference on Artificial Life (ECAL’99).Incremental Evolution with Minimal Resources
1999. First International Khepera Workshop (IKW’1999).Evolution of Adaptive-Synapse Controllers
1999. 5th European Conference on Artificial Life (ECAL’1999), EPFL, Lausanne, Switzerland, 13-17 September.Learning of Variable-Resolution Cognitive maps for Autonomous Indoor Navigation
IEEE Transactions on Robotics and Automation. 1999. Vol. 15, num. 6, p. 990 – 1000. DOI : 10.1109/70.817664.Learning and Evolution
Autonomous Robots. 1999. Vol. 7, num. 1, p. 89 – 113. DOI : 10.1023/A:1008973931182.1998
How co-evolution can enhance the adaptation power of artificial evolution: Implications for evolutionary robotics
1998. First European Workshop on Evolutionary Robotics (EVOROBOT’1998).Evolutionary Robotics in Artificial Life and Behavior Engineering
Evolutionary Robotics II; Ontario (Canada): AAI Books, 1998.Evolutionary Neurocontrollers for Autonomous Mobile Robots
Neural Networks. 1998. Vol. 11, num. 7-8, p. 1461 – 1478. DOI : 10.1016/S0893-6080(98)00082-3.Evolution and learning in Autonomous Robotic Agents
Bio-inspired Computing Systems; Lausanne: PPUR, 1998.Incremental Robot Shaping
1998. 3rd International Conference on Genetic Programming.Incremental Robot Shaping
Connection Science. 1998. Vol. 10, p. 341 – 360. DOI : 10.1080/095400998116486.Co-evolving predator and prey robots: Do ‘arm races’ arise in artificial evolution?
Artificial Life. 1998. Vol. 4, num. 4, p. 311 – 335. DOI : 10.1162/106454698568620.Competitive Co-Evolutionary Robotics: From Theory to Practice
1998. 5th International Conference on Simulation of Adaptive Behavior (SAB’1998), Zurich, Switzerland, August 17-21. p. 515 – 524.Contextually Guided Unsupervised Learning Using Local Multivariate Binary Processors
Neural Networks. 1998. Vol. 11, num. 1, p. 117 – 140. DOI : 10.1016/S0893-6080(97)00110-X.Hardware Solutions for Evolutionary Robotics
1998. First European Workshop on Evolutionary Robotics (EVOROBOT’1998), Berlin, p. 137 – 151. DOI : 10.1007/3-540-64957-3_69.Design, Control, and Applications of Autonomous Mobile Robots
Advances in Intelligent Autonomous Agents; Boston: Kluwer Academic Publishers, 1998. p. 159 – 186.1997
Reducing Human Design and Increasing Adaptivity in Evolutionary Robotics
Evolutionary Robotics I; Ontario (Canada): AAI Books, 1997.Evolutionary Mobile Robotics
Genetic Algorithms in Engineering and Computer Science; Chichester: John Wiley and Sons, 1997.Adaptive Behavior in Competitive Co-Evolutionary Robotics
1997. 4th European Conference on Artificial Life (ECAL’1997).Interview on Evolutionary Robotics
1997.God Save the Red Queen! Competition in Co-Evolutionary Robotics
1997. 2nd Conference on Genetic Programming.1996
Evolving fast-learning neural controllers for a mobile robot
1996. 24th Conference of Neurobiology, Goettingen,Evolutionary Re-Adaptation of Neurocontrollers in Changing Environments
1996. Intelligent Technologies.Extraction of Coherent Information from Non-Overlapping Receptive Fields
1996. International Conference on Artificial Neural Networks (ICANN’1996), Bochum, Germany, July 16-19, 1996. p. 389 – 394. DOI : 10.1007/3-540-61510-5_68.Evolution of Homing Navigation in a Real Mobile Robot
IEEE Transactions on Systems, Man and Cybernetics Part B : Cybernetics. 1996. Vol. 26, num. 3, p. 396 – 407. DOI : 10.1109/3477.499791.Evolution of Plastic Neurocontrollers for Situated Agents
1996. 4th International Conference on Simulation of Adaptive Behavior (SAB’1996), Cape Cod, Massachusetts, September 9-13. p. 402 – 410.1995
Evolution and Mobile Autonomous Robotics
Towards Evolvable Hardware, The Evolutionary Engineering Approach; Berlin: Springer-Verlag, 1995. p. 221 – 249.A computational theory of learning visual features via contextual guidance
Perception. 1995. Vol. 24S, p. 22.Evolution of neural control structures: Some experiments on mobile robots
Robotics and Autonomous Systems. 1995. Vol. 16, num. 2-4, p. 183 – 195. DOI : 10.1016/0921-8890(96)81008-6.1994
How to Evolve Autonomous Robots: Different Approaches in Evolutionary Robotics
1994. 4th International Workshop on Artificial Life, Cambridge, p. 190 – 197.Active Perception, Navigation, Homing, and Grasping: An autonomous Perspective
1994. From Perception to Action Conference (PERAC’1994).Automatic Creation of an Autonomous Agent: Genetic Evolution of a Neural Network Driven Robot
1994. 3rd International Conference on Simulation of Adaptive Behavior (SAB’1994), Brighton, England, August 8-12. p. 421 – 430.Reti neurali artificiali: fondamenti tecnici e teorici
1994
1993
Anticipatory Tracking of a Moving Object
1993. Artificial and Natural Visual Systems. p. 344 – 353. DOI : 10.1007/3-540-57379-8_21.Eye tracking with a recurrent neural network
Cognitive Systems. 1993. Vol. 3, p. 331 – 349.Patterns of Interactions in Shared Environments
1993. 2nd European Conference of Artificial Life (ECAL’1993).Emergence of Nest-Based Foraging Strategies in Ecosystems of Neural Networks
1993. Second International Conference on Simulation of Adaptive Behavior (SAB’1992).1992
Prediction and Imitation of Linguistic Sounds by Neural Networks
1992. First Workshop on Neural Networks and Speech Processing.Internal Prediction and Environment Models: An application to the development of language
1992
1991
Emergent complex behaviours in ecosystems of neural networks
1991. Parallel Architectures and Neural Networks.Symmetry Detection with a Neural Network
1991