CS Lintzen – TU Delft
Internship. June 2010

Abstract
During my internship at Biorob an impedance control method for an anthropomorphic lower extremity exoskeleton is developed. This exoskeleton can be used to restore the gait of paralyzed people. Webots simulations are used to test the control method.
Therefore a realistic model of both the human as the exoskeleton is made. The lower extremities of the human model have 6 DOF all in the sagital plane. The human model has only passive elements simulating that the human is fully paralyzed. The actuation is done by the exoskeleton.
The human model is compared to a Matlab model of the TU Delft. The joint angle trajectories of both models are approximately the same.
The exoskeleton model is anthropomorphic and is assumed to be rigidly attached to the user. The actuation is done directly at the joints, so that all supplied power is converted into joint rotation. The parameters of the impedance control, stiffness, damping and reference trajectory, are phase dependent. They are determined using particle swarm optimization.
The optimizations are able to find a gait pattern of the human model wearing the exoskeleton. This gait pattern is compared to the gait of a healthy subject, tracked by the University of Twente. The joint angles of the simulated gait have large similarities with the tracked angles.
The developed model can be used to develop and test more complex control methods. By using a monotone fitness function and an adjusted fitness function the result can further improve.
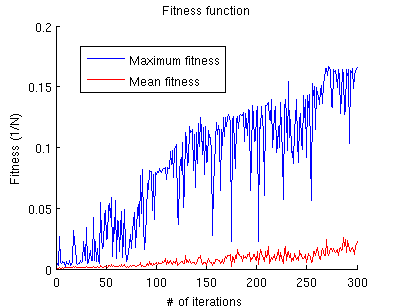
Fitness function
In the figure underneath the maximum and mean fitness values are shown over 300 iterations. The finess function is: Fitness = Time * Distance / Torque
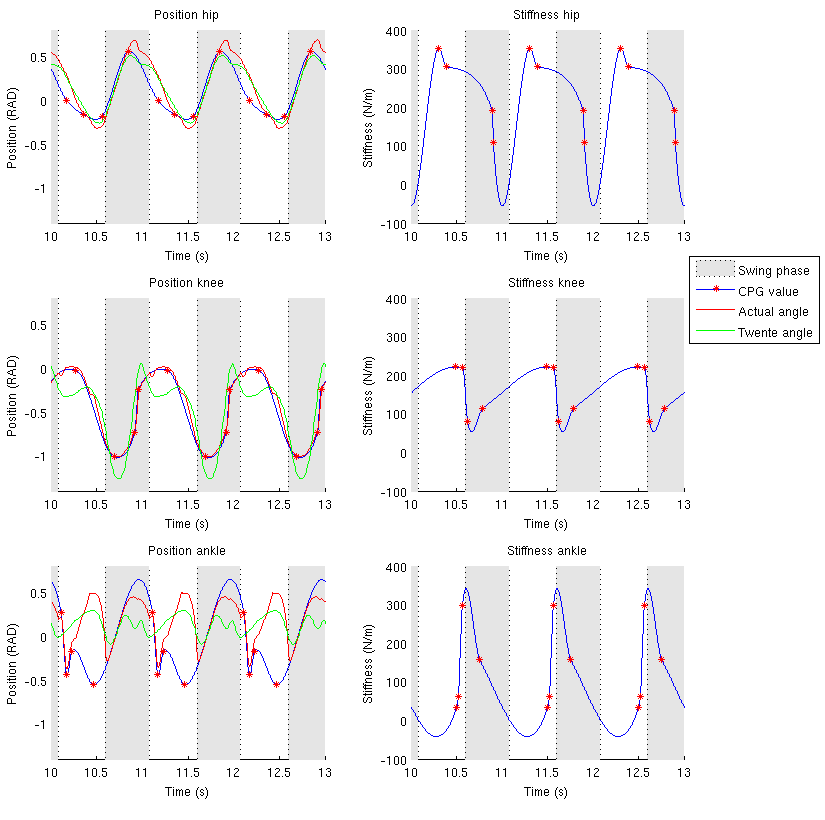
Optimized gait pattern
In this movie the optimized gait can be seen: movie.avi
The angle trajectories and stiffness values of this movie can be seen in the figure underneath. The angle trajectories are compared to data provided by the University of Twente.