Abstract
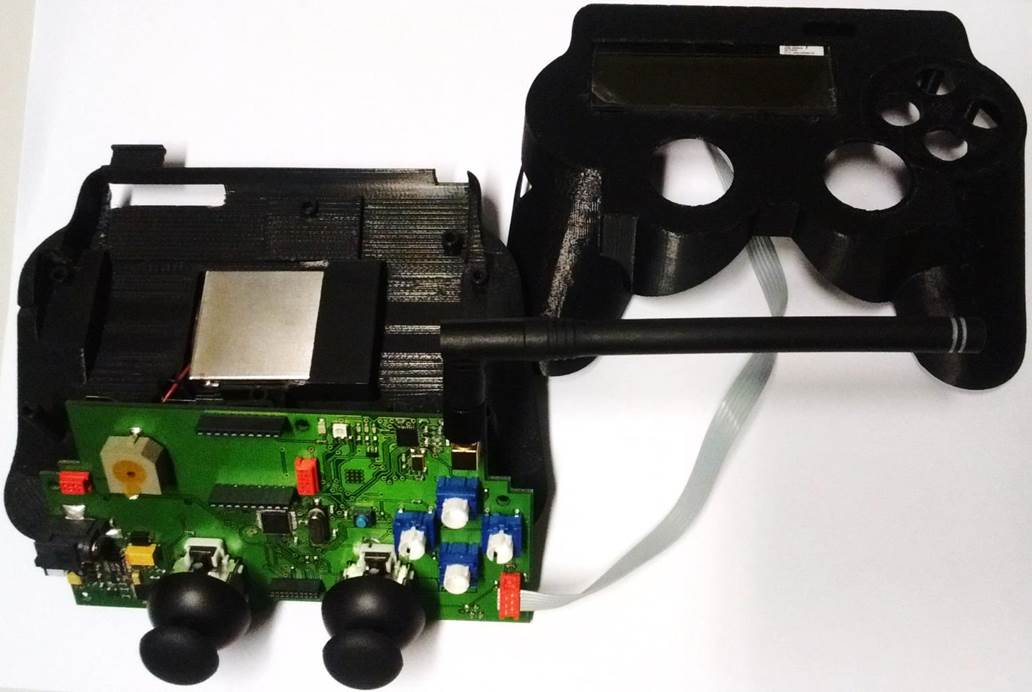
The goal of this semester project is to continue the development of a wireless remote control that has been started by Matthieu Tardivon three years ago. The remote must be able to control in real time the locomotion of the Amphibot III robot and to upload a new firmware from a SD card to the robot. The first step was to analyze the previous remote in order to find where the problems were and what it was necessary to improve. Then a working software part has been implemented.