Un encodeur, quand un utilisé avec un moteur, permet de connaitre de manière précise l’angle de rotation de celui-ci. Ceci rend ainsi possible la mesure du déplacement du robot (et donc la connaissance de sa position) ou de sa vitesse.
Le module est constutué d’une roue à aimants et d’un petit PCB à fixer sur le moteur. Il n’est compatible qu’avec les moteurs BO-10.
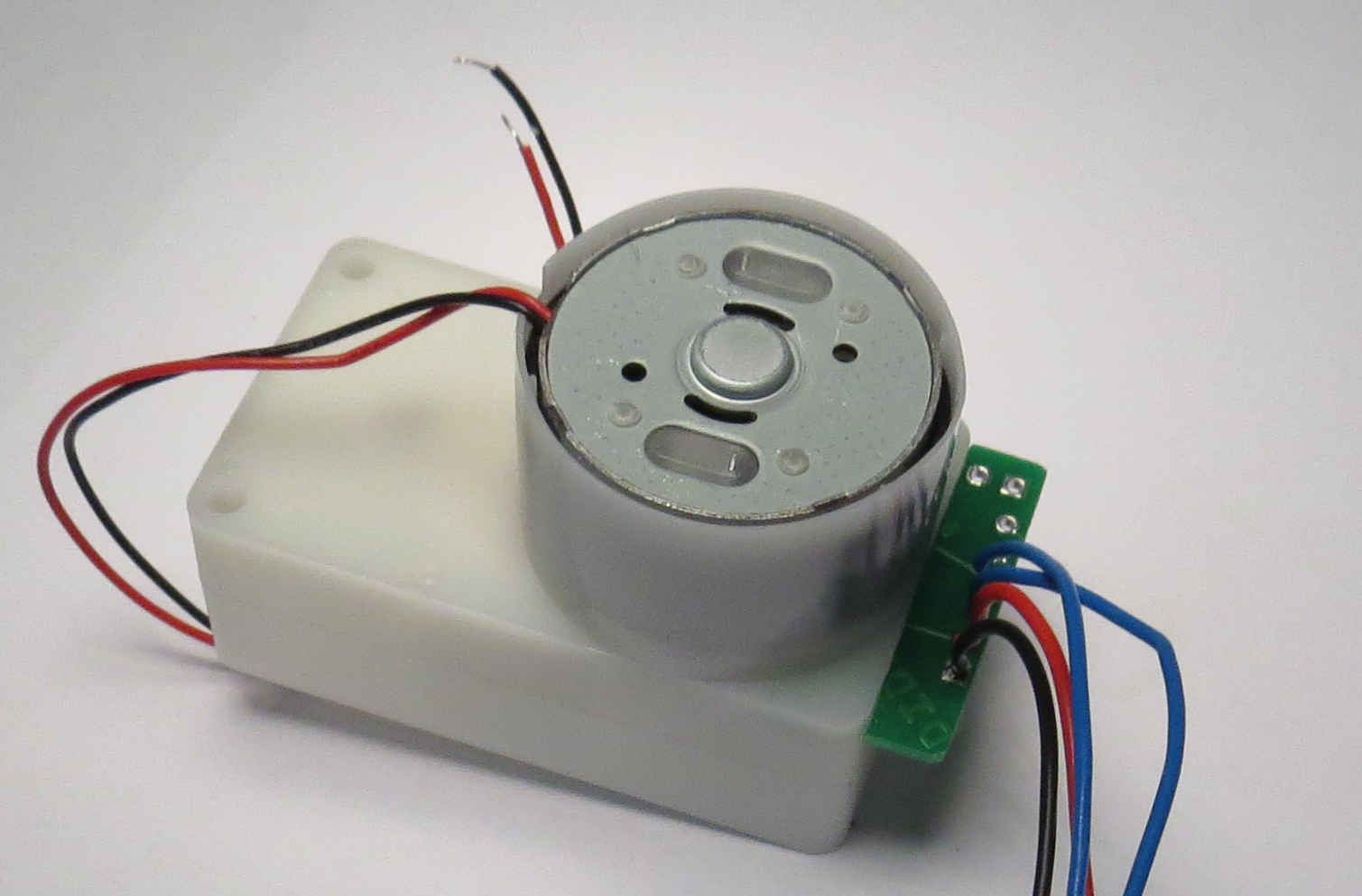
Table des composants
| Composant |
Valeur |
| Résistances x2 |
10 kΩ |
| Capacité |
100 nF |
Guide d’assemblage
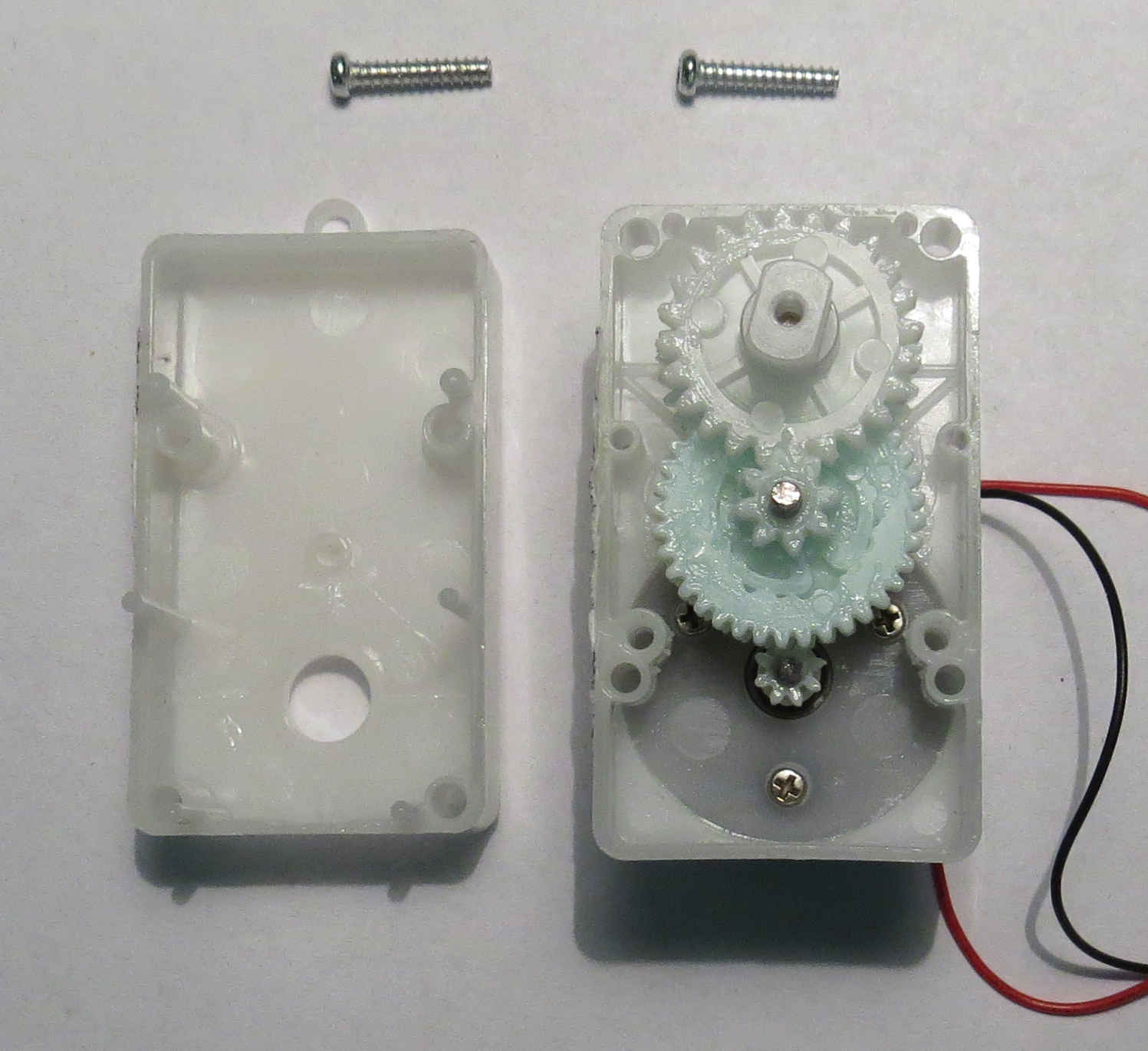 |
Étape 1
- Ouvrir délicatement le moteur en dévissant la partie supérieure.
|
 |
Étape 2
- Avec une pince brucelle, retirer les quatre engrenages en notant l’odre d’assemblage initial (ici de gauche à droite).
|
 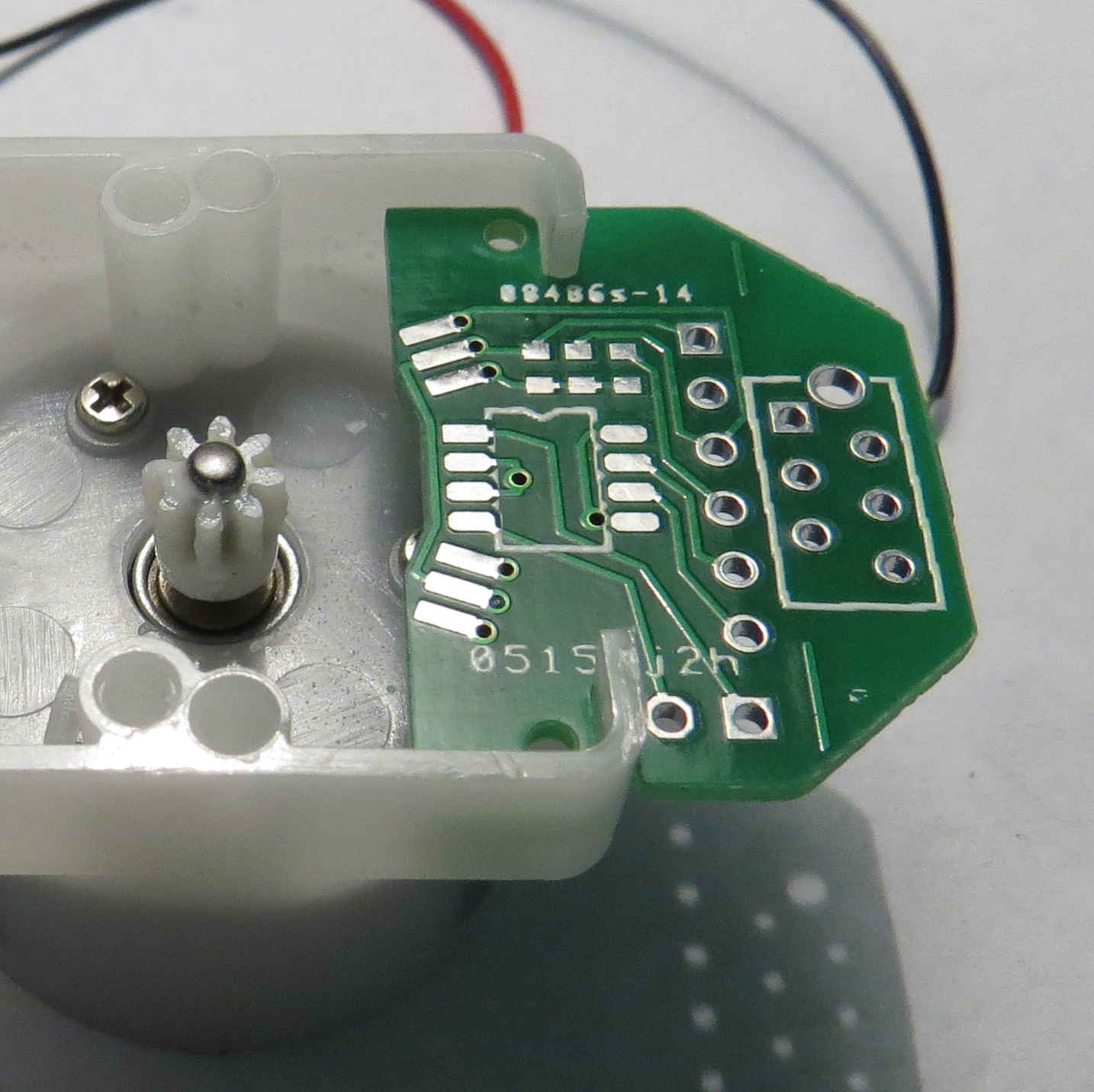 |
Étape 3
- Au moyen d’un cutter, découper une encoche symétrique de 18 mm de longueur sur la pièce à laquelle sont fixés les axes.
- Vérifier que le PCB rentre dans l’encoche sans avoir de jeu.
|
  |
Étape 4
- Retirer le pignon présent sur l’arbre moteur.
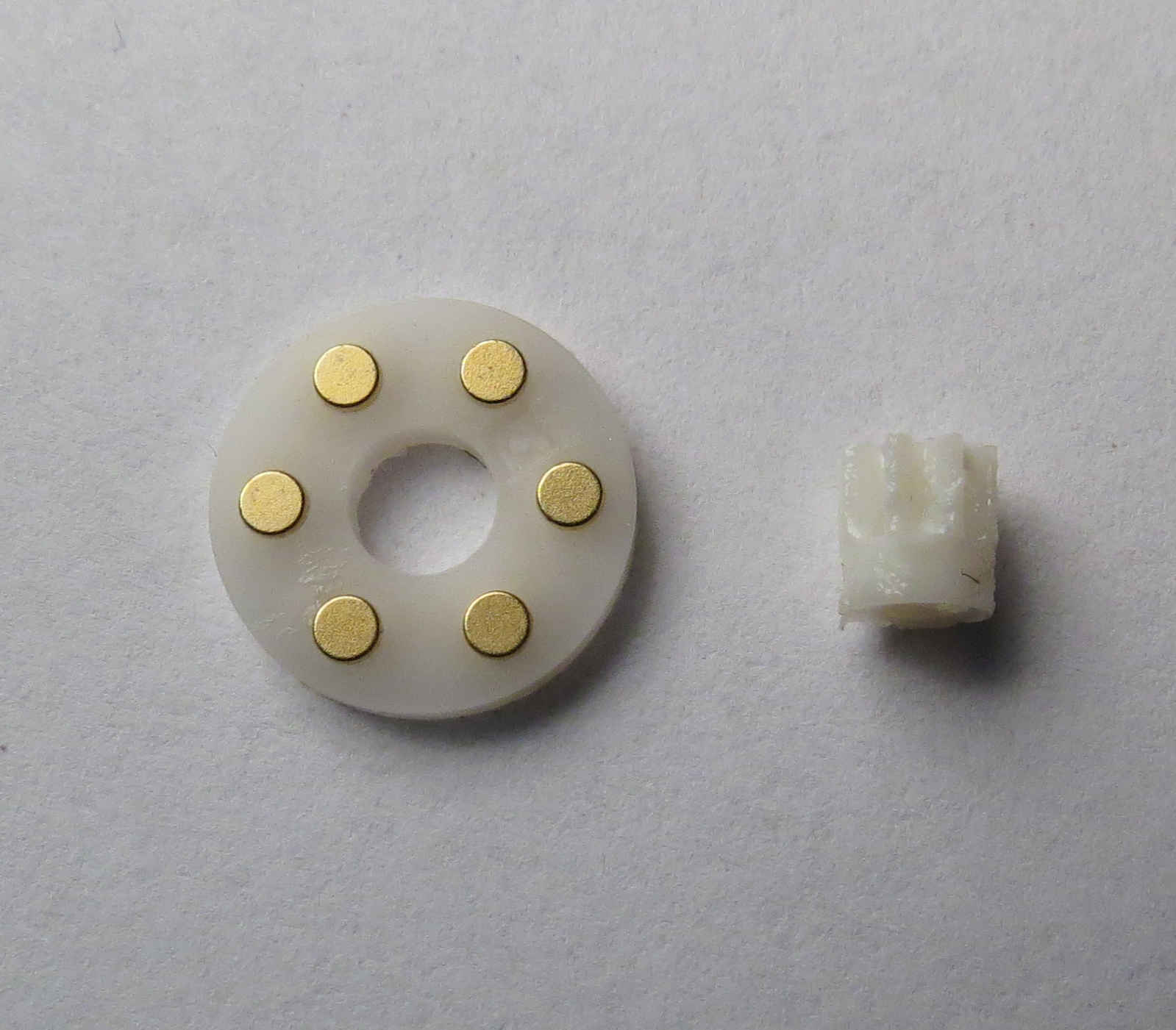
- Se munir du petit disque sur lequel sont fixés les aimants.
|
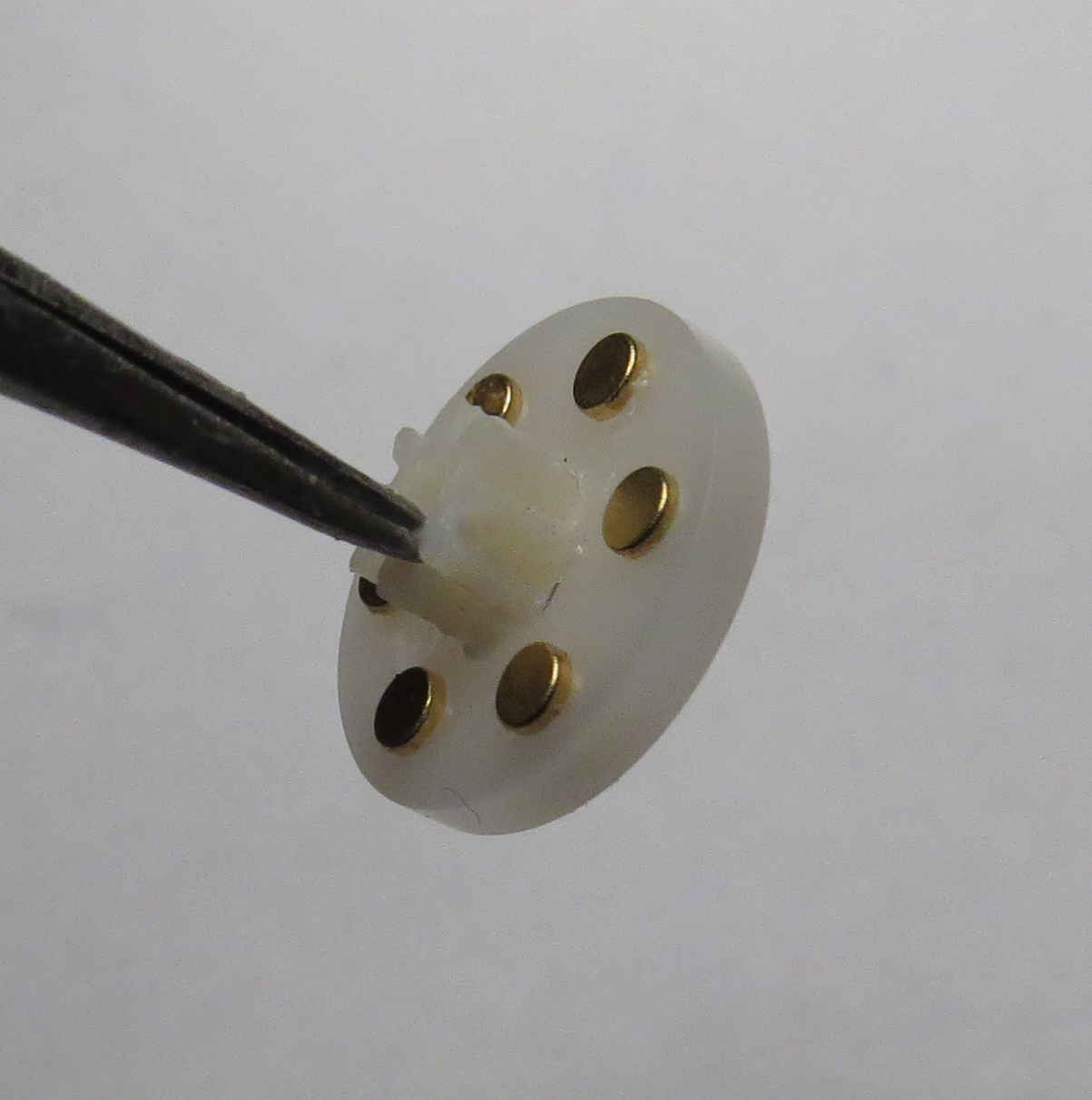  |
Étape 5
- Enfoncer avec serrage le disque autour de la base non-dentée du pignon.
- Remettre le pignon en place et vérifier qu’il y a de l’espace entre la coque en plastique et le disque, lui permttant de tourner sans frottement.
|
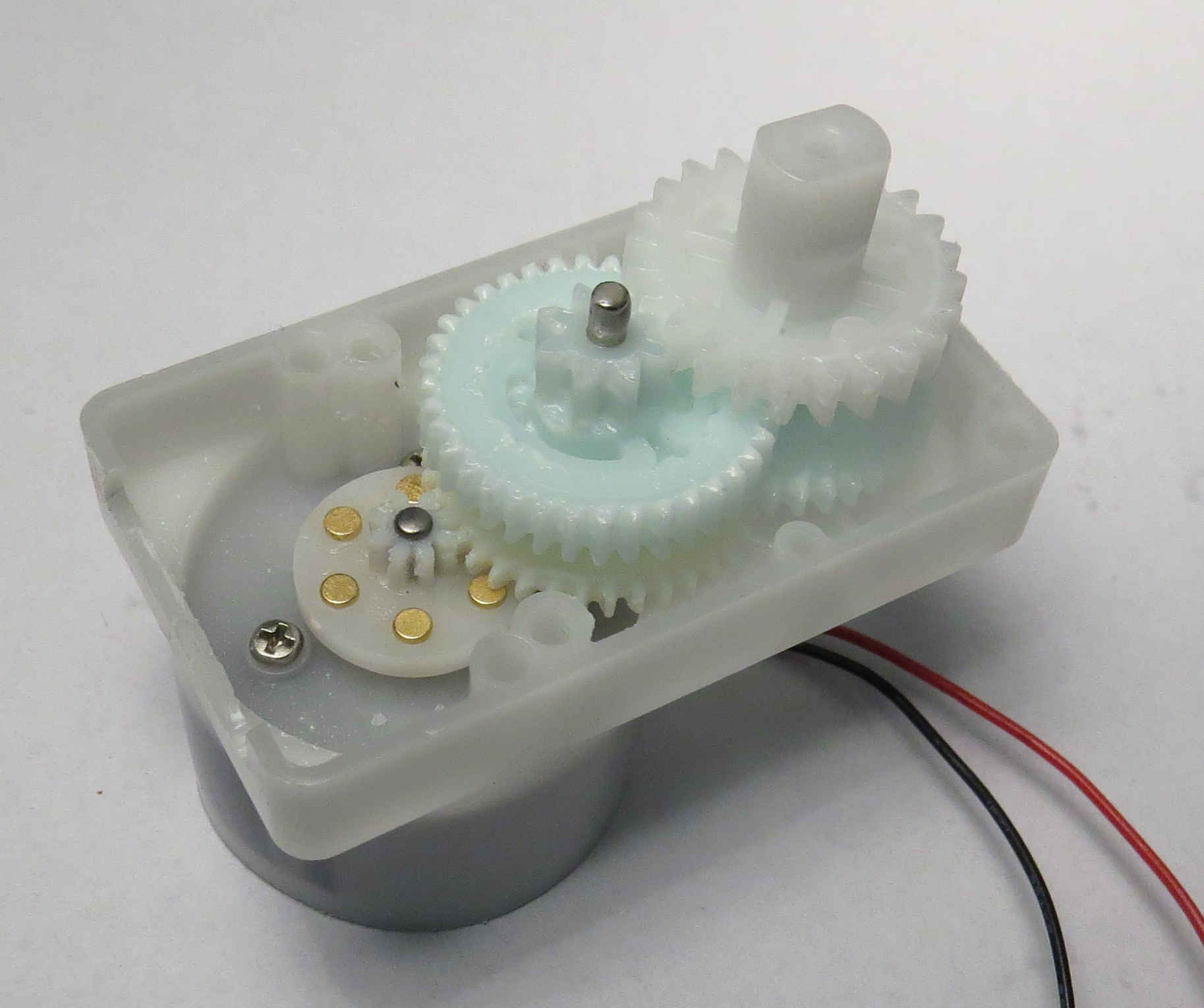 |
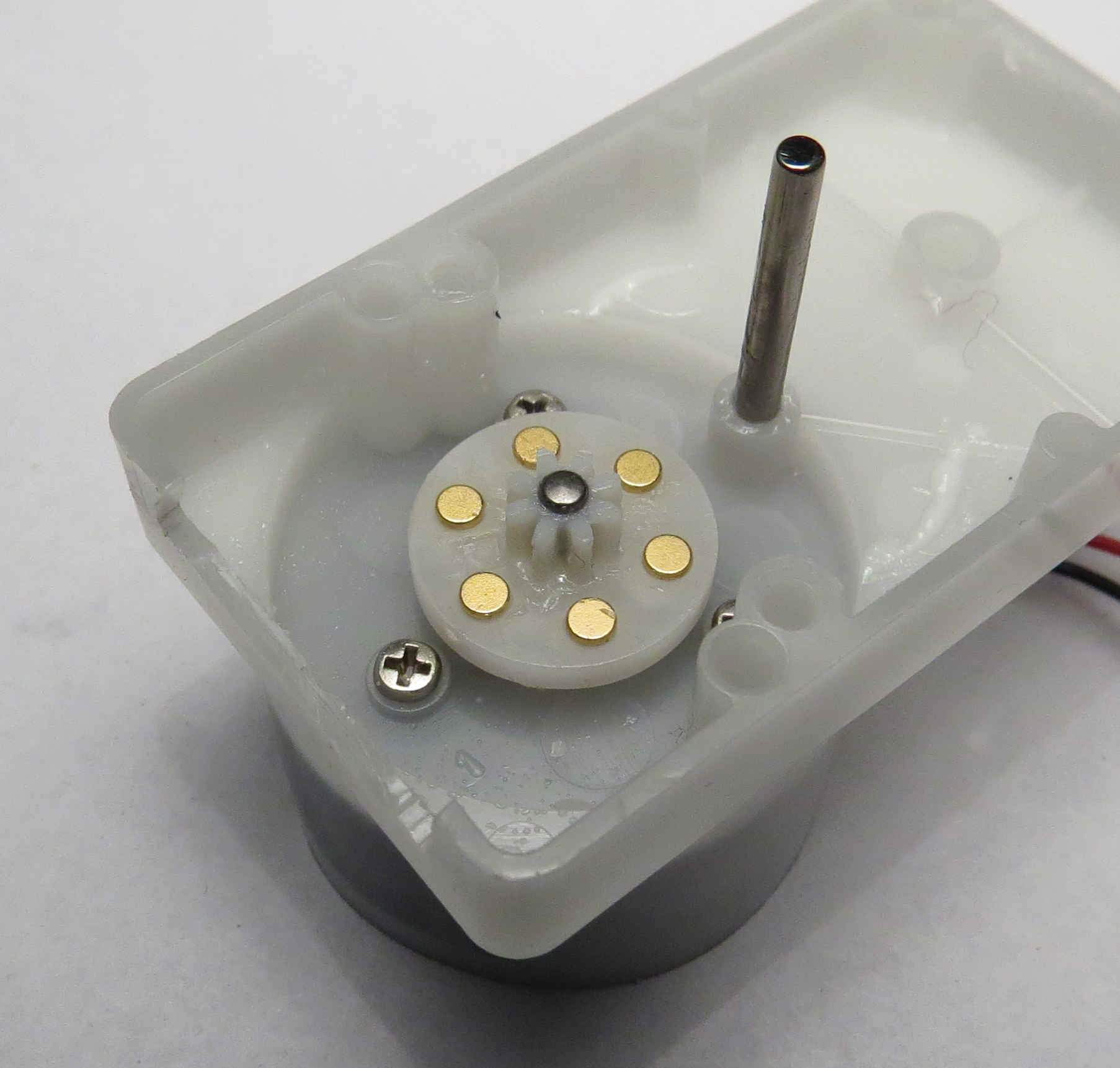
Étape 6
- Remettre les engrenages en place.
- Vérifier qu’il n’y a pas de contact entre le disque et le premier engrenage.
|
 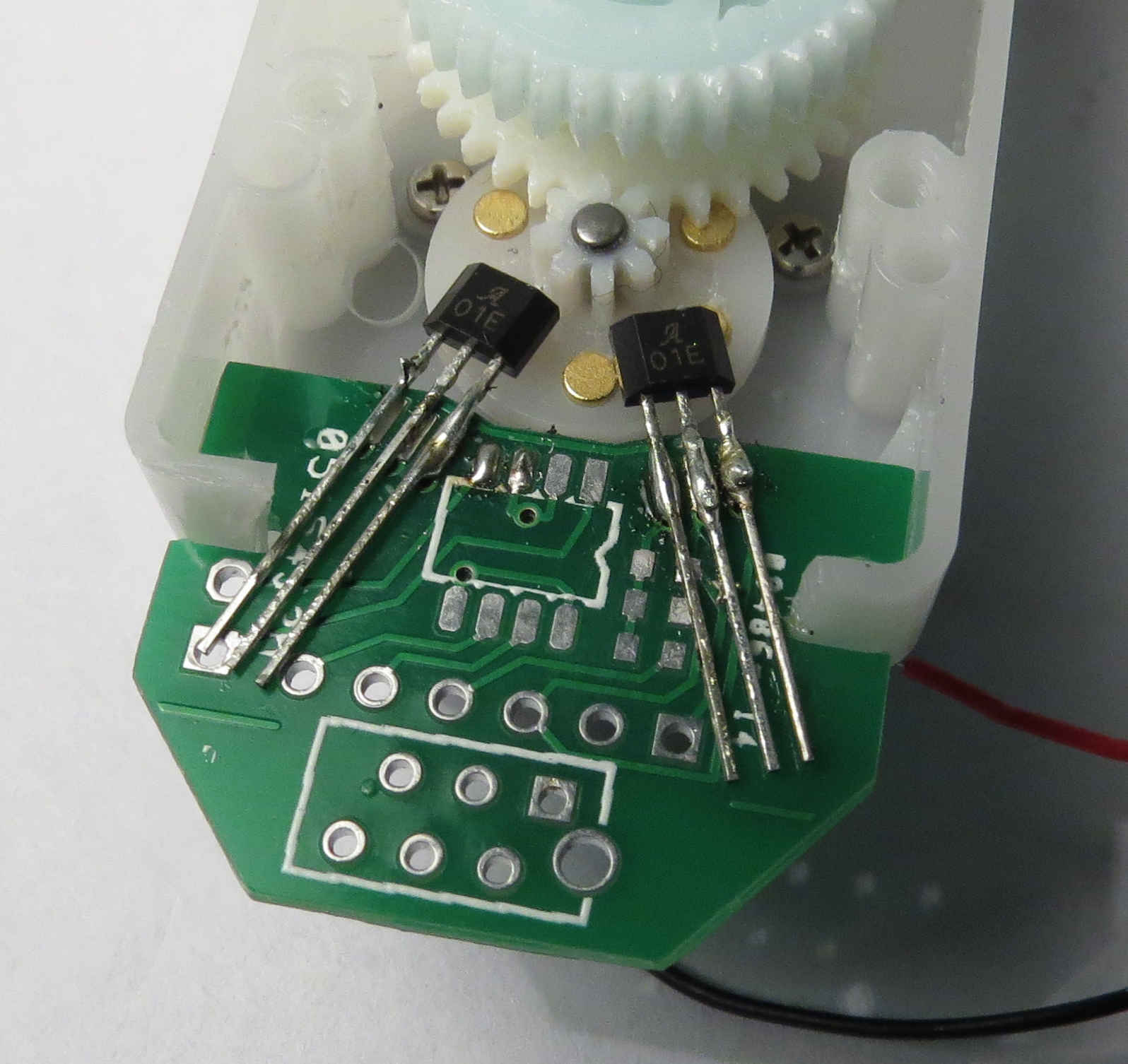 |
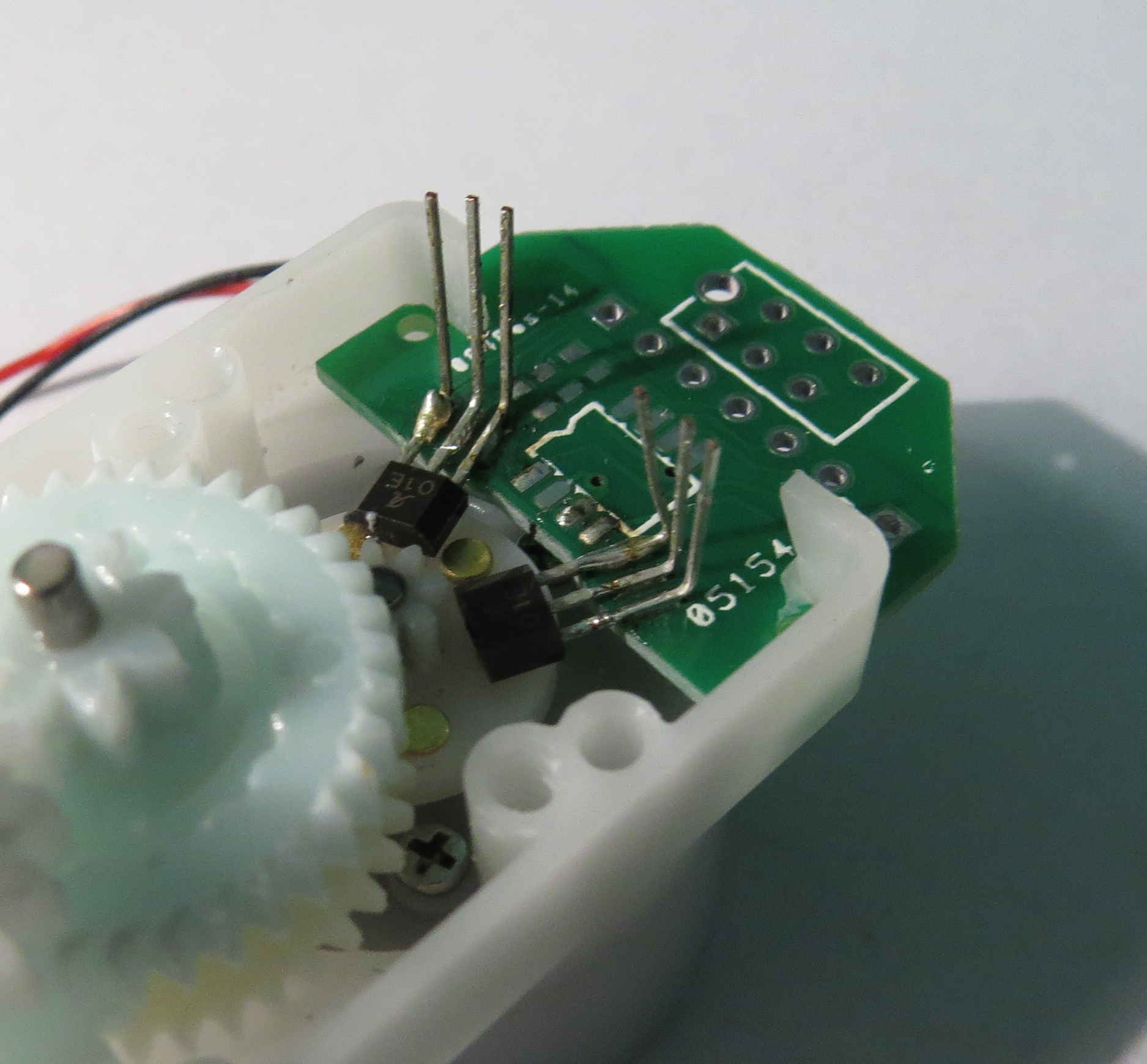
Étape 7
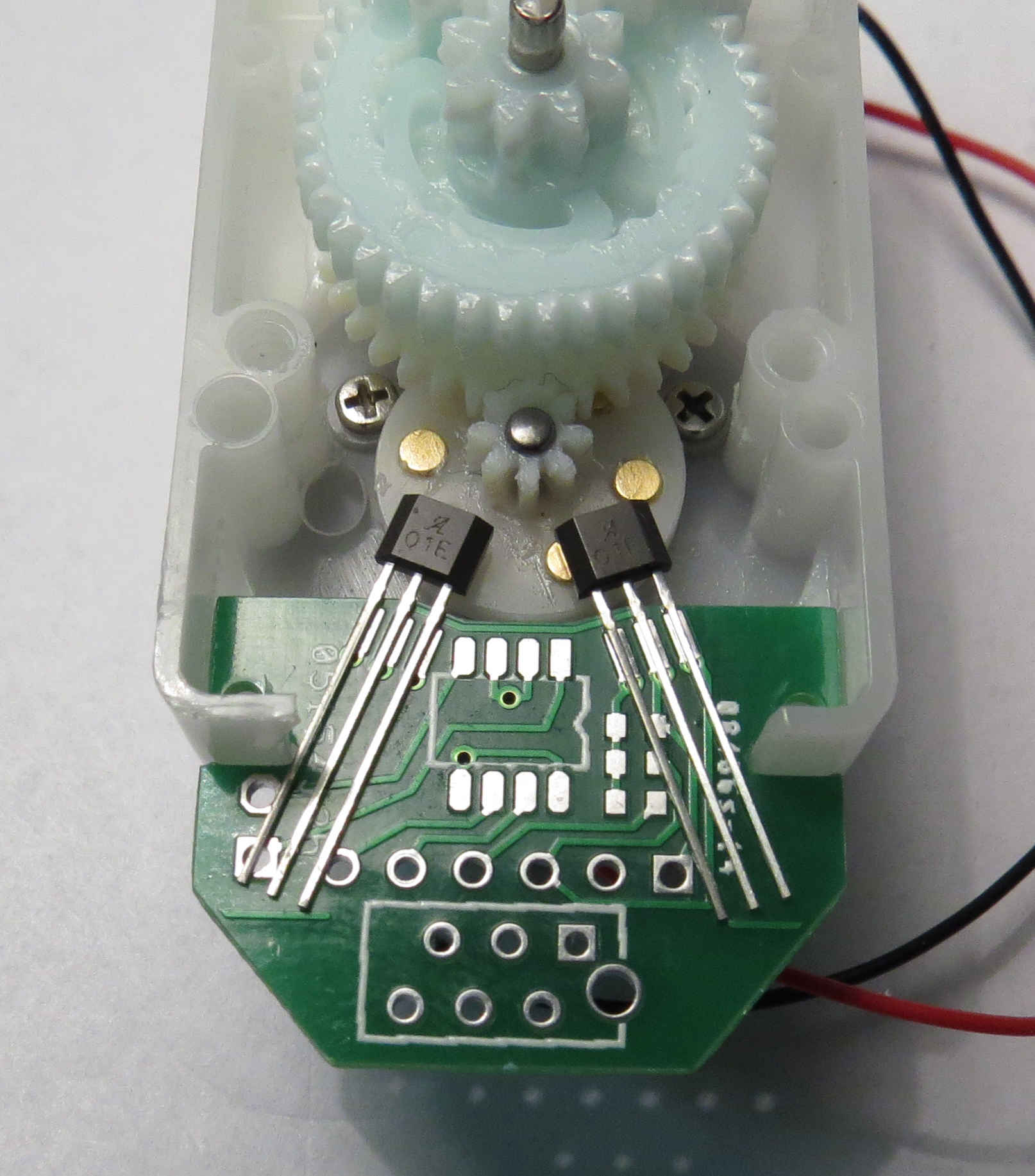
- Replacer le PCB dans l’encoche.
- Placer puis souder sur les pads les deux capteurs à effet Hall, leur face plate dans la direction du disque.
- Ajuster leur position de façon à ce qu’il soient juste au dessus des aimants, mais sans toucher les dents du pignon.
|
 |
Étape 8
- Soulever les pattes des capteurs et les couper à la base avec une pince.
|
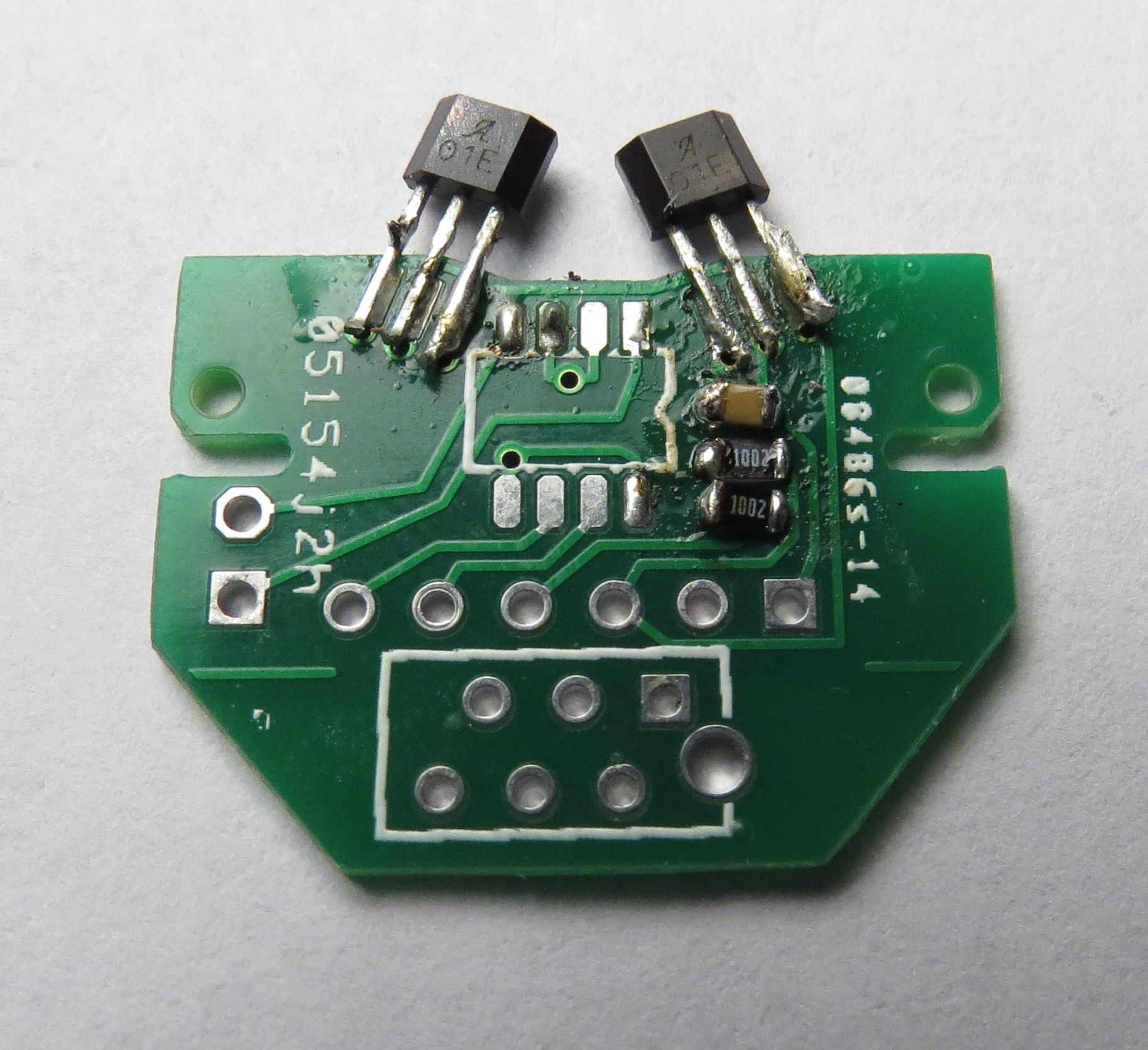 |
Étape 9
- Souder les deux résistances de 10 kΩ sur les deux pads inférieurs et la capacité de 100 nF sur le pad supérieur.
- Ces trois pads sont situés sous le capteur de droite. Attention, ils sont particulièrement petits et rapprochés.
|
 |
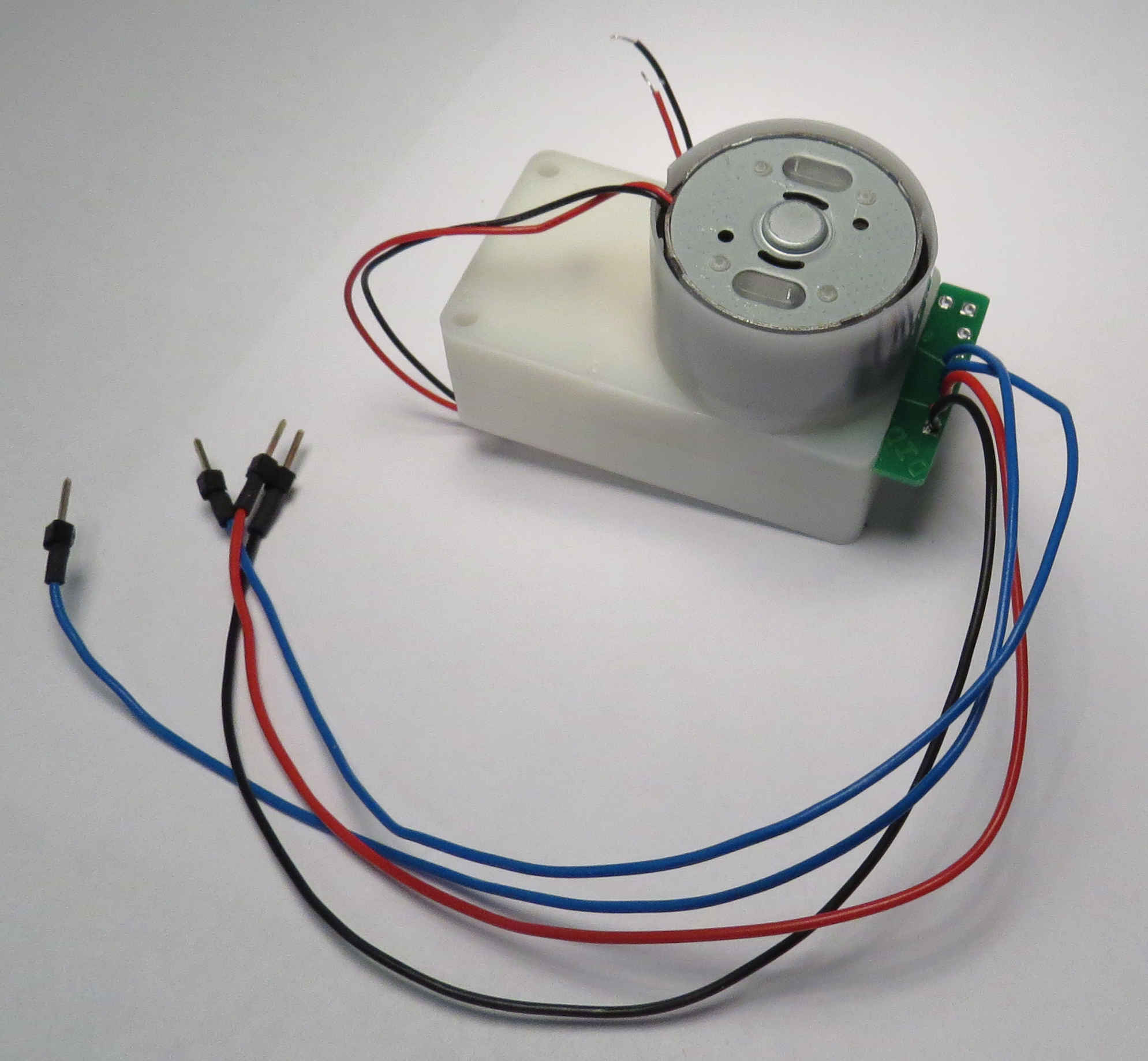
Étape 11
- Couper la partie inférieure du PCB comportant le connecteur à deux rangées.
- Souder les fils de connection. De droite à gauche: un noir (GND), un rouge (Vc), puis deux bleus (les signaux des capteurs).
- A l’autre extrémité, souder GND et Vcc sur un pin double et les fils bleus sur des pins simples.
|
 |
Étape 12
- Replacer le PCB dans le moteur puis revisser la coque en plastique supérieure.
|
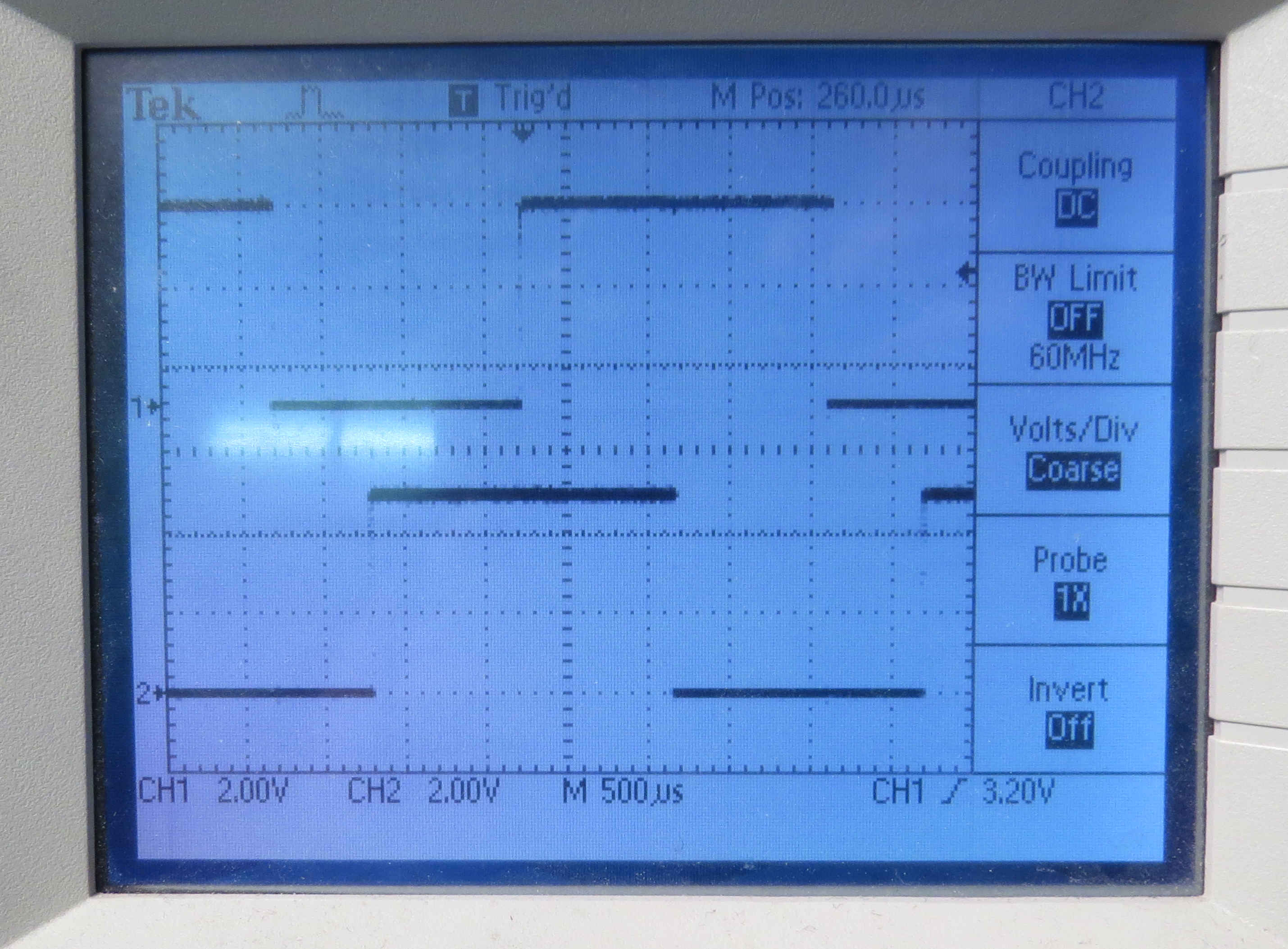 |
Étape 13
- En utilisant une source de tension, alimenter le PCB d’encodeur et le moteur: les fils rouges sont connectés à +5V et les fils noir à 0V.
- Connecter les cables bleus à un oscilloscope pour visualiser les signaux des capteurs.
- Vérifier que ces signaux sont tous deux rectangulaires et déphasés l’un par rapport à l’autre.
|
Connection
Les fils rouge et noir du PCB d’encodeur doivent être connectés respectivement à +5V et 0V, donc par exmeple au rack de la powerboard. Les fils bleus peuvent être connectés à des entrées du microcontrôleur.
Programmation
Une library a été développée par le comité afin de faciliter l’utilisation du module. Elle est disponible sur le GitHub de l’association ou peut être téléchargée directement et automatiquement depuis l’IDE Arduino.