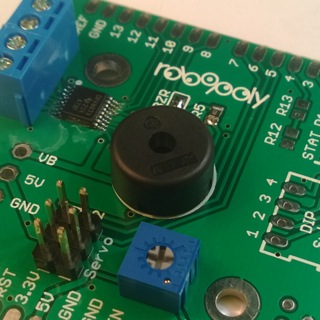
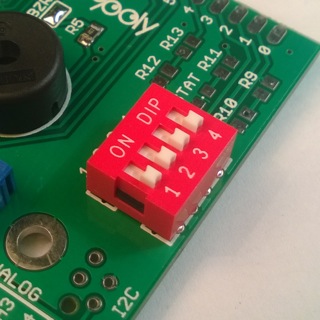
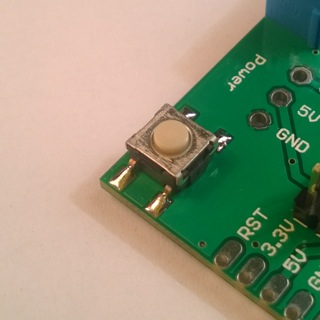
Le shield Robopoly permet au PRismino d’interagir physiquement avec le monde. Divers composants peuvent être utilisés pour modifier des paramètres au cours de l’exécution d’un programme comme un bouton, un DIP-switch à 4 voies et un potentiomètre.
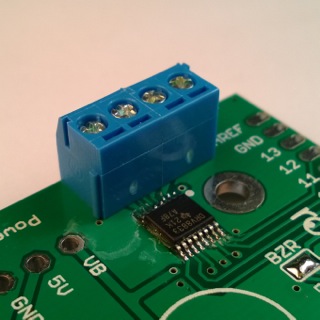
Le shield comporte aussi le nécessaire pour donner la puissance aux moteurs: un pont-H. En effet, le PRismino ne pouvant pas donner assez de courant aux moteurs, le but du pont-H est de reprendre cette fonction.
Le module Bluetooth et le port I2C ne peuvent pas être soudés en même temps que le DIP-switch car ils partagent les mêmes pins du microcontrôleur. Pour installer ces modules optionnels, il ne faut pas souder les étapes 1 et 12 et se référer aux tutoriels de Bluetooth et de I2C.
La puce du pont-H est soudée par le comité car il n’est pas évident de souder ce genre de petit composant, du moins dans un premier temps.
Avant de commencer vérifier que ce soit bien la 1ère version du shied, c’est marqué “Ver. 1” sous le circuit imprimé.
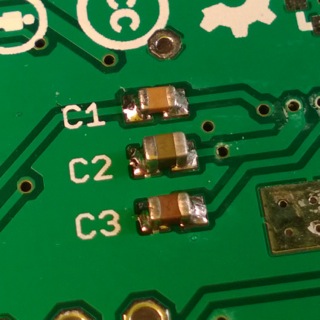
Table des composants
| Composant | Valeur | Code |
|---|---|---|
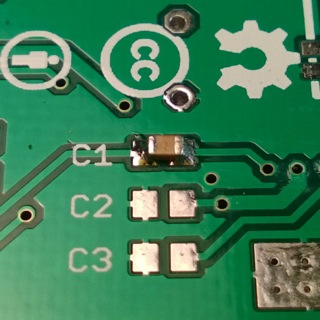
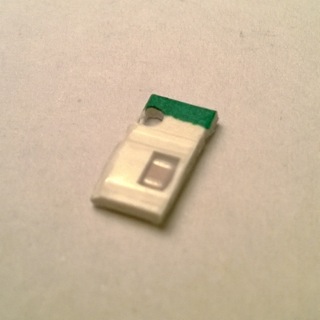
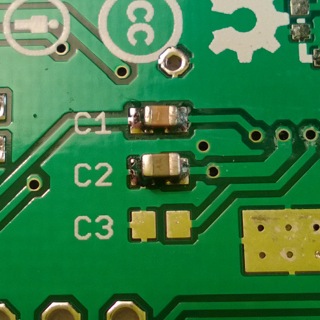
| C1 | 10nF | Vert |
| C2 | 10uF | Noir-rouge |
| C3 | 2.2uF | Noir-vert |
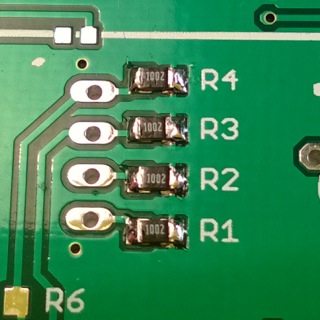
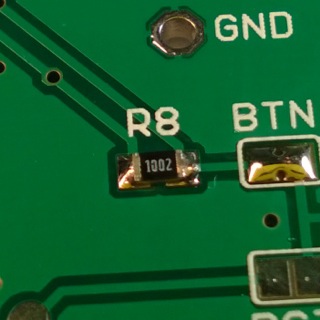
| R1, R2, R3, R4, R8 | 10KΩ | 1002 |
| R5 | 1KΩ | 102 |
Guide d’assemblage
 |
Etape 1
|
 |
Etape 2
|
 |
Etape 3
|
 |

Etape 4
|
 |
Etape 5
|
 |
Etape 6
|
 |
Etape 7
|
 |
Etape 8
|
 |
Etape 9
|
 |
Etape 10
|
 |

Etape 11
|
 |
Etape 12
|
 |
Etape 13
|
 |
Etape 14
|
 |
Etape 15
|
Résumé des pins
Attention: l’utilisation en mode output des pins en rouge peut endommager le microcontrôleur.
| A0 | potentiomètre (POT) | LED (LED) | 13 |
| A1 | moteur | 12 | |
| A2 | moteur | 11 | |
| A3 | moteur | 10 | |
| A4 | moteur | 9 | |
| A5 | buzzer (BUZZER) | 8 | |
| bouton (BUTTON) | 7 | ||
| servo 1 (SERVO1) | 6 | ||
| servo 2 (SERVO2) | 5 | ||
| 4 | |||
| I2C ou DIP-switch 4 (DIP4) | 3 | ||
| I2C ou DIP-switch 3 (DIP3) | 2 | ||
| Bluetooth ou DIP-switch 2 (DIP2) | 1 | ||
| Bluetooth ou DIP-switch 1 (DIP1) | 0 |