La base mécanique du robot est laissé au membre pour éviter des clônes. Ici sont présentés quelques exemples de bases mécaniques avec leurs avantages et inconvénients dont il serait astucieux d’en prendre note.
Si tu veux que ton robot soit immortalisé parmi ces exemples envoie nous une photo avec les attributs qui le rendent unique.
La Lulu-Mobile (Lucie Maret)
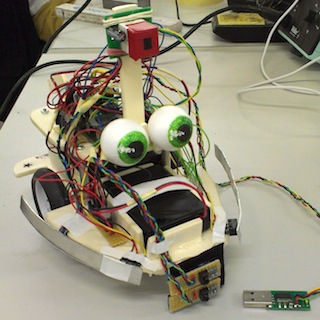 |
Avantages
Inconvénients
|
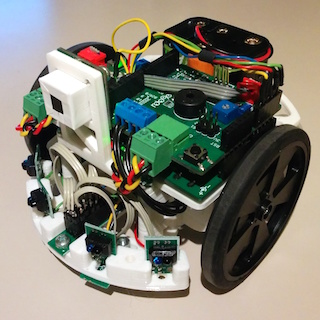
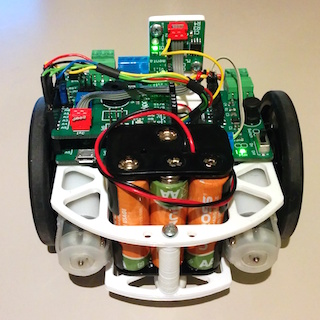
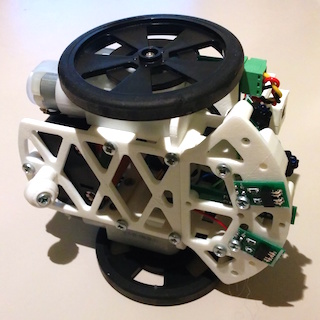
Prototype 2.0 (Karl Kangur)
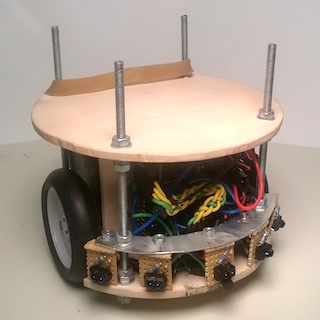 |
Avantages
Inconvénients
|
mPuck (Marco Pagnamenta)
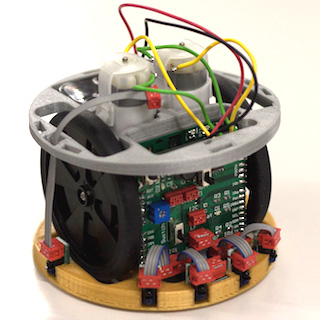 |
Avantages
Inconvénients
|
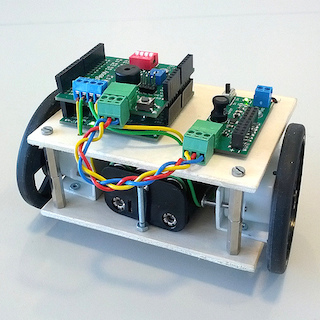
Le robot de démonstration
 |
Avantages
Inconvénients
|
Robot en carton
 |
Avantages
Inconvénients
|
Robot de démonstration
 |
Avantages
Inconvénients
|