| Finding Features of Fine-Skills in Manipulation Lodovico Emilio Oldani (EL) Fine-skills typical for professional manipulation tasks – such as manual welding, minimally invasive surgery, and industrial polishing – require dedicated training and years of experience. What is the thing learned throughout this training process? What is the thing that differentiates skilled people from the unskilled? In this project the researcher will analyze the skilled and unskilled kinematics data, which is already collected for the manual welding tasks from skilled and unskilled welders. The analysis will comprise of applying the component analysis and factorization tools on the given data. Non-negative matrix factorization, vector quantization and principal component analysis will be the three principal applications. The challenge in this project is to put the kinematics (position, velocity or acceleration) trajectories in a form that such analysis tools are applicable. This work will basically be about implementing/applying these techniques in the MATLAB environment. (References: Erden, M.S. and Tomiyama, T., 2009. “Identifying welding skills for training and assistance with robot”, Science and Technology of Welding and Joining, 14 (6): 523-532; Lee, D.D., Seung, S.H. , 1999, “Learning the parts of objects by non-negative matrix factorization”, Nature, 401: 788-791.) Project: Semester Project Period: 18.02.2014 – 20.06.2014 Section(s): EL IN ME MT MX Type: 35% theory, 65% software Knowledge(s): MATLAB Subject(s): Machine Learning Responsible(s): Mustafa Suphi Erden |  |
| Learning tactile signals in object manipulation task Betrant Claude Daniel Vermot (MT) An object manipulation task can usually be broken down into several sequential action phases, marked by contact events. The tactile signal between the hand and the object is the main source of sensory information that can predict these contact events. However, it is still very difficult to directly access the tactile signal from the fingertips. In this project, the student will mount the biomimetic tactile sensor—SynTouch on the fingertips and demonstrate a series of object manipulation tasks, such as pick and place, handover. The tactile data from SynTouch will be collected during the demonstration. Several machine learning techniques, especially classification methods, will be used to predict the contact events, such as initial grip, sliding, contact with table. The learned model should be validated on the real robot platform: a 7-DOF KUKA arm and a 4-DOF Barrett hand mounted with SynTouch. Project: Semester Project Period: 18.09.2014 – 20.01.2015 Section(s): EL IN ME MT Type: 30% experiments 30% theory 40% implementation Knowledge(s): Matlab C++ Subject(s): Robotics Signal processing Responsible(s): Miao Li, Guillaume de Chambrier |  |
| Comparative study of Reinforcement Learning algorithms for trajectory planning Olguta Robu (MT) The problem of planning an optimal trajectory for a given task is omnipresent in robotics manipulation. Reinforcement Learning (RL) algorithms can enable a robot to learn autonomously from its past experience and from the feedback given by a cost function that represents its performance in the task at hand. Many RL algorithms have been derived from different theoretical backgrounds such as stochastic optimal control, expectation-maximization or gradient ascent. Their comparative performance can vary between different contexts. The aim of this project is to evaluate the performance of a selection of RL algorithms in the context of trajectory planning and to identify the most suitable one for this purpose. The RL algorithms will be applied to learning the parameters of a non-linear dynamical system used to generate a reference trajectory and evaluated on simple via-point tasks. The comparison will be done in simulation using MATLAB. The most promising algorithm might be implemented on the actual robot if time permits (C++ required). Project: Semester Project Period: 18.09.2014 – 20.01.2015 Section(s): EL IN ME MT Type: 30% theory, 70% software Knowledge(s): MATLAB Subject(s): Machine Learning, Robotics, Trajectory Planning Responsible(s): Joel Rey, Klas Kronander | 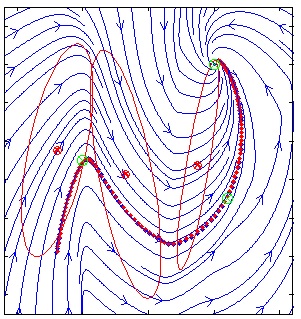 |
Task analysis and adaptive control design for a polishing task for watchmaking Alexandre Ringwald (MX) This project is concerned with the analysis and automation of a surface polishing task for the watchmaking industry. The project involves task analysis in collaboration with an industry partner and development of an adaptive control module that allows a robot to perform the polishing task in a human-like fashion. Project: Semester Project Period: 15.09.2014 – 20.01.2015 Section(s): MT MX Type: 60% software 40% experiments Knowledge(s): Subject(s): adaptive control, human robot interaction, task analysis Responsible(s): Klas Kronander |