This project pursues three complementary research lines on design of 4-hands system, robot control and study of human motor control.
These are:
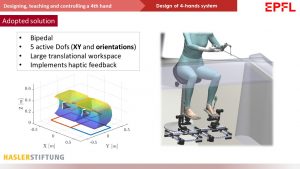
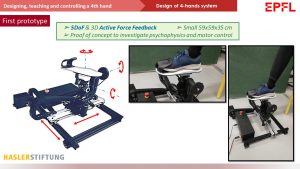
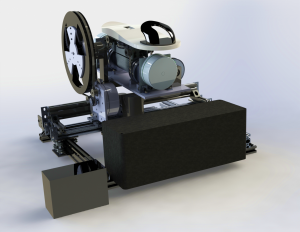
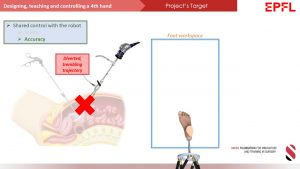
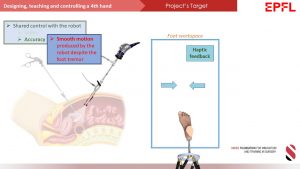
- Design of 4-hands system: Development of robotic feet interfaces and robot controllers to tele-operate the two extra robotic arms via haptic interfaces.
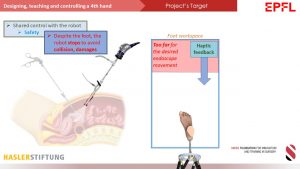
- Shared Control: Robot Control Strategies to endow the robotic system with task autonomy, while the human supervises the interaction of the manipulation in both motion and force.
- Human Motor Control: Study of underlying mechanisms of coordination among hands and feet in such supernumerary scenario. This with the goal of understanding human limits and develop training strategies using robotic technologies.
Design of 4 hands system
Foot Haptic Platforms for Bipedal Teleoperation.



Shared Control
Event Based Haptics for Safe Manipulation:
Autonomous force and motion generation using Impedance Control modulated via Dynamical Systems
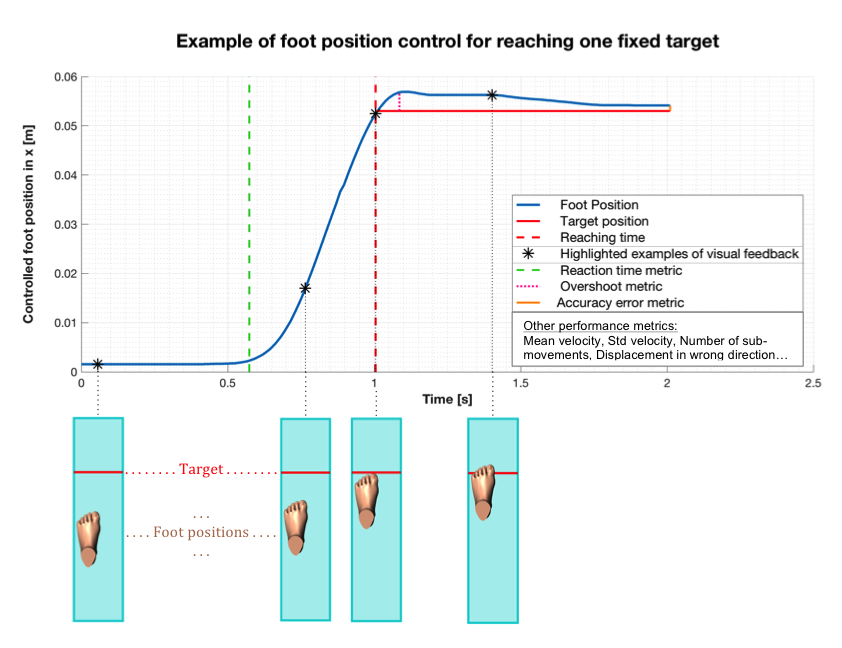
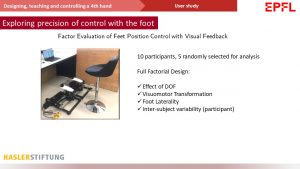
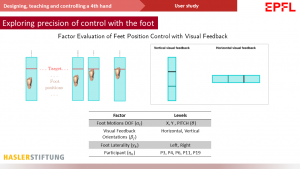
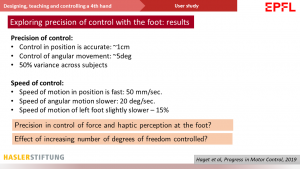
Human Motor Control
Study of coordinated and uncoordinated control of the two feet