K041——————————————————————————–
 Angular velocity estimation of a reaction sphere actuator for satellite attitude control
Angular velocity estimation of a reaction sphere actuator for satellite attitude control
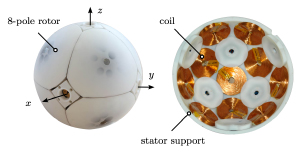
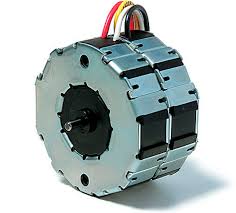
A Reaction Sphere (RS) has been proposed as a potential alternative to traditional Attitude and Orbit Control System (AOCS) actuators based on reaction wheels. The RS consists of an 8-pole permanent magnet spherical rotor that is magnetically levitated and can be accelerated about any axis by a 20-pole stator with electromagnets. A schematic of the RS actuator is depicted in Fig. 1. A RS laboratory prototype has been manufactured to validate force and torque analytical models. More recently, a spherical rotor optimized to improve its manufacturability has been designed and manufactured and preliminary closed- loop measurements have been performed.
To manage the stored angular momentum, and for closed-loop control purposes, measurement of the angular velocity of the rotor inside the stator is required by the AOCS. To this end, a technique based on determining the back-EMF voltages using Faraday’s law has been proposed and validated experimentally [4]. However, the proposed direct method is particularly susceptible to distortions of the rotor magnetic flux density. In parallel to this, some preliminary work has been performed to introduce the Extended Kalman Filter (EKF) as an angular velocity estimator.
The proposed project aims at investigating EKF techniques to estimate the angular velocity of the rotor given measurements of the radial component of the rotor magnetic flux density. The proposed activities include a literature review of existing techniques, the development of algorithms for estimating the angular velocity, the implementation and evaluation of the developed algorithms in high-level language such as MAT- LAB, and the implementation of the algorithms on the dSPACE real-time control platform for experimental validation using the RS prototype.
MER: Alireza Karimi
Type of project: Master in industry
Student: Enrique Guzman
 |
This project is carried out in collaboration with CSEM in Neuchatel. |
J033——————————————————————————-
 Optimal control of a hydrofoil boat
Optimal control of a hydrofoil boat
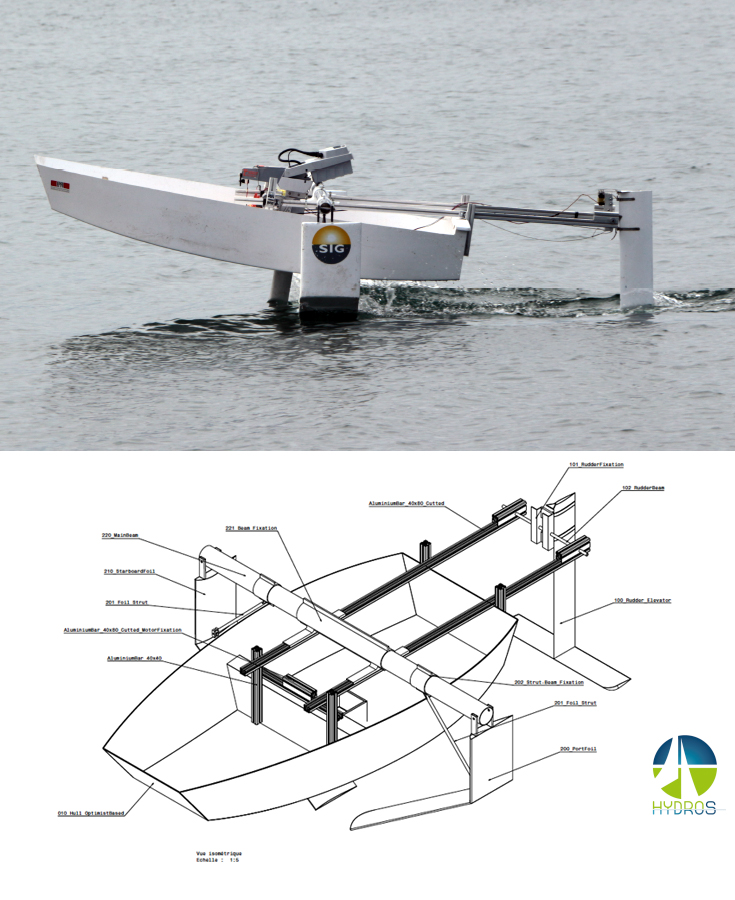
HYDROS, the Swiss scientific research center specialized in sailing, is holding an engineering competition to take place in lake Léman, summer of 2014 (see link). The goal is the construction of an energy efficient hydrofoil boat. EPFL has forged a group of teams that specialize on optimizing each of the specific components of the system. LA is responsible for the dynamical modeling of the boat in order to plan effective trajectories and track them in the face of uncertainties.
The first part of the project focused in modeling the boat dynamics and discovering the optimal control policies in simulation. The second part, due to start in the next spring semester, is going to explore the interaction of the boat with the environment in a realistic setting. Model-mismatch and external disturbances might deem the control policies suboptimal or even infeasible. The project will focus in robustifying the system against uncertainties.
Professor : Colin Jones
Type of project: Master
Student: Olguta Robu
J036——————————————————————————–
 Model-based control of quadcopters
Model-based control of quadcopters
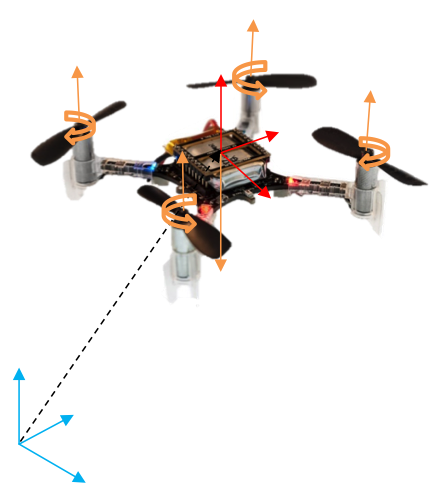
Quadcopters serve as a challenging test bench for control and machine learning algorithms in academia. Commercially, they are usually used for surveillance. However, if reliable control is ensured, a fleet of quadcopters can be used for physically demanding and complex tasks, such as carrying heavy payloads or building structures.
In this project, we aim to develop and test advanced Model Predictive Control (MPC) algorithms. The project will involve, identification of system dynamics, design and deployment of control algorithms and autopilot software to embedded platforms, experimentation and analytical comparison of control methods.
Requirements : Good C/C++ programming skills, background in optimisation and control theory
Professor: Colin Jones
Type of project: Master
Assistants: Altug Bitlislioglu, Tomasz Gorecki
Student: Marti Pomes
B053—————————————————————————–
 Temperature and pressure control of professional coffee machines
Temperature and pressure control of professional coffee machines
Parker Hannifin in Geneva is a system supplier for manufacturers of professional coffee and tea machines. Currently, Parker is developing a new system for next generation coffee machines that is environmentally friendly whilst mastering precisely the critical process parameters. The three critical parameters for taste and quality during coffee brewing are water flowrate, temperature and pressure.
After insertion of the ground coffee in a lightly packed matrix, the matrix is filled up quickly with hot water. Brewing starts once water is in contact with coffee. When the matrix is full, the pressure increases until the brewed coffee starts to flow into the cup.
The aim of this master project is to experimentally identify the parameters of an available model. Various data-based methods to detect the transitions between operational phases, as well as PID-based strategies to control the matrix temperature and pressure, will be studied in simulation. The temperature in the matrix can be either measured or estimated. Various cases will be simulated to test the robustness with respect to disturbances such as change of coffee type and fouling by limestone. If temperature control after a phase transition is identified to be critical, an Iterative Learning Control (ILC) strategy will be investigated. The strategies for temperature and pressure control will finally be tested experimentally.
Professor: Dominique Bonvin
Type of project: Master
Assistants: Michael Amrhein, Diogo Rodrigues
Student: Eduardo Sergent
|
Most of the work will be done at the Laboratoire d’automatique of EPFL, with occasional visits to the research center of Parker Hannifin in Geneva for the experimental implementation. |
B054——————————————————————————–
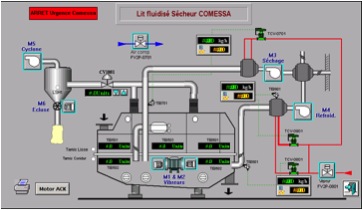 Control of a band-drying process
Control of a band-drying process
Band drying is an important process for Nestlé that is used in the manufacturing of breakfast cereals and pet care products. Good process control is important to:
- ensure consistent product moisture content and thus the desired quality,
- keep process stability during production changeover,
- reduce energy consumption.
The goal of this project is to control the product moisture or water content at the exit of the dryer. The student will analyze the process, identify an input-output model, design a controller and implement it on a programmable logic controller. Benefits will be assessed by comparison with manual control based on historical data.
Professor: Dominique Bonvin
Type of project: Master
Assistant: Julien Billeter
Student: Jonas Schneider
|
This project will be carried out in collaboration with Nestlé in Orbe, Switzerland |
J041——————————————————————————–

Path-following model predictive control for riderless motorcycles
Controlling a riderless motorcycle is a challenging task as the dynamics are highly nonlinear and non-minimum phase. Moreover, suspension or chain pull effect make the dynamics more complicated to model accurately.
In the first phase of this project, we will focus on hardware and software design for the autonomous control of a real Thunder Tiger motorcycle.
After that, based on simulations and literature, we will investigate the proper modelling of a motorcycle. The next task will be to perform system identification experiments. In the last phase, we will design and compare different controllers that will be implemented on the Thunder Tiger motorcycle.
Skills: Matlab, Control systems, System Identification and enthusiasm !
Professor: Colin Jones
Type of project: Master
Assistants: Luca Fabietti and Shukla Harsh Ambarishkumar
Student: Eric Unnervik
K042——————————————————————————–
 Sensor-less control of a stepper motor
Sensor-less control of a stepper motor
Stepper motors are the preferred choice for cost-effective and precise positioning systems. Actuators used in the automotive industry require a high level of robustness under widely varying ambient conditions. Traditionally stepper motors are operated in feed-forward mode, which allows no adaptation to varying conditions such as load or, temperature fluctuations. A feedback mechanism would greatly improve robustness to these fluctuations, but position sensors are expensive. An alternative is to estimate the state of the motor from the electrical signals on the drive lines. Various methods to implement such sensor-less control have been published in (patent) literature. Usually these methods are based on some simple, direct use of the drive signals.
The goal of this Master’s thesis project is to develop an advanced, robust, sensor-less control system for a simple stepper motor. The project will focus on the theoretical solution, validated by computer simulations using a detailed mathematical model of a stepper motor.
MER: Alireza Karimi
Type of project: Master in industry
Student: Marc Liechti
|
The project can be taken either as a master project or an industry internship at Johnson Electric in Switzerland |
K043——————————————————————————-
 Real-time optimization and control of centrifugal compressors
Real-time optimization and control of centrifugal compressors
Centrifugal compressors play a very important role in the oil and gas industry and as such increasing the availability of these machines is a major goal for their operators. The safe operating envelope of centrifugal compressors is defined by the constraints due to surge and choke phenomena as well as the minimum and maximum rotational speed limits. This fact, coupled with the limitations on pressure rise per stage and with economic considerations, leads to process designs utilizing compressors in series and parallel configurations or in various combinations of both to meet the operability requirements in a flexible way.
These complex arrangements pose significant challenges from a control engineering point of view. The interactions between anti-surge and throughput or process control loops that are already present in a single compressor become more difficult to handle when multiple compressors are to be considered. Poor control designs can lead to anything from undesirable oscillations in process operating conditions to cascaded surge events and complete plant shut-downs.
In this masters project we consider parallel and series configuration of compressor plants to design model predictive control (MPC) solutions to handle the interactions among the different variables and the operational constraints. The project work should include the consideration of hierarchical arrangement possibilities between MPC and PID controllers as well as real time optimization (RTO) layers and make recommendations for preferred control designs. Creation of simulation case studies from existing model building blocks and evaluation of different control scenarios are also considered to be part of the masters project work.
MER: Alireza Karimi
Type of project: Master in industry
Student: Katie Jones
|
This project is carried out in collaboration with ABB Corporate Research in Switzerland. |
K045——————————————————————————–
 Design of a multi-dimensional axes controller for precision positioning
Design of a multi-dimensional axes controller for precision positioning
Precision positioning systems in metrology require motion control involving several axes (linear and rotational). The goal of this project is to design, test and validate a motion controller for multidimensional axes with ultra-high accuracy positioning taking into account the following issues:
- Multivariable control of several coupled motion axes.
- Minimization of vibration.
- The possibility to implement different type of control algorithms (e.g., independent a prior PID, RST, state-space models, optimal & robust techniques) to better characterize & optimize the underlying system.
MER: Alireza Karimi
Type of project: Master in industry
Student: Lorenz Buhler
|
The project can be taken either as a master project or an industry internship at Hexagon in Switzerland |
K046——————————————————————————–
 Control of the semi-active suspension system of a scaled race car
Control of the semi-active suspension system of a scaled race car
A laboratory setup at Gipsa Lab in gronoble is constructed to study the effect of the suspension system on the vertical dynamics of race cars. It consists of a 4-poster bench, and a small 1/5 scaled car equipped with 4 semi-active Electro- Rheological dampers (from Fludicon).
The road sollicitations are emulated through 4 independent electrical motors, allowing to provide different road profiles under each wheel. Many sensors are used to give informations on the car behavior :
- an inertial measurement unit,
- 4 accelerometers for the wheel vertical behaviors,
- 4 suspension deflection sensors,
- pitch and yaw angle sensors,
- 4 force sensors at the tyre/road contact and 4 ER damper force sensors.
The test system allows one to test several strategies on estimation and control for the vertical dynamics. The objective of this project is to design and implement a gain-scheduled or LPV (linear parameter varying) controller for the semi-active suspension system.
This project is carried out in collaboration with Gipsa Lab of INP Grenoble under supervision of Prof. Olivier Sename.
MER: Alireza Karimi
Type of project: Master
Student: Antoine Burnard
K050——————————————————————————–
Local terrain estimation for legged robots
The legged robotics group at ASL is developing quadrupedal robots for locomotion in challenging environments. In order to take appropriate steps, these robots can use camera-based SLAM (Simultaneous Localization and Mapping) to sense their environment. Researchers at ASL have already developed a general framework allowing for collaborative long term localization and mapping by means of point features and descriptors.
The goal of this Master’s thesis is to extend this framework to dense, as opposed to feature- or point based, mapping and localization. Both mapping and localization procedures use B-splines, piece-wise polynomial basis functions, for surface representation. The map’s resolution, determined by the number and polynomial degree of the used B-Splines, can be adapted based on the complexity and skewness of the environment. This reconstruction process has been implemented for a moving monocular camera with inertial position estimates. The first step of the thesis will be to extend this to a non-moving stereo camera, the advantage being that depth information can be extracted immediately when the relative positions of two cameras are known. Once the map reconstruction process works reliably for different camera and map setups, subsequent robot positions in the vicinity of the initial position will be estimated by photo-metric error minimization with respect to the previously obtained map. The implementation and simulations are done in ROS (Robot Operating Systems) and an own Gauss-Newton optimization scheme is written for solving the non-linear weighted least squares problem arising from the mapping and localization optimization problems.
This project is carried out in collaboration with Autonomus System Lab (ASL) of ETH Zurich under supervision of Prof. Ronald Siegwart
MER: Alireza Karimi
Type of project: Master
Student: Frederike Dumbgen
J047—————————————————————————
Data-driven optimization for the energy bidding problem
The behaviour of buildings that participate in an energy demand-response market is difficult to model due to the various sources of uncertainty that affect their states (weather, internal gains, etc.) Furthermore, participation of a building in the energy market should be decided based on economic viability criteria which are hard to evaluate (stochastic prices, uncertainty in the demand).
In order to maximize a building’s profitability under several specifications imposed both by the building’s operating conditions and the grid, a predictive control problems is solved. Uncertainty is injected into several components of the problem, and, consequently, a robust and/or stochastic optimization approach has to be considered. The main goal of this project is to a) Characterize the uncertainty based on data analysis and b) Solve the optimization problem making use of the results of the first step and make a decision regarding the participation of a building in a given market.
The student will be exposed to modern data modelling techniques working with real-world datasets. By the end of the project the student will have passed through all the stages of analysis, modelling of data, optimization and assessment of the derived policy. A strong background on mathematical programming / optimization / model predictive control is required. Exposure to Matlab would be helpful.
Remark: The figure is borrowed from http://scipy-lectures.github.io/advanced/scikit-learn/
Professor: Colin Jones
Type of project: Master
Assistants: Georgios Stathopoulos and Tomasz Gorecki
Student: Tiago Morim
J022——————————————————————————-
 Modeling and control of a flapping wing aircraft (Ornithopter)
Modeling and control of a flapping wing aircraft (Ornithopter)
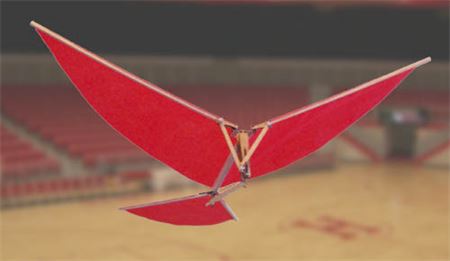
Biological flyers, such as ornithopters, use different means of propulsion than human engineered air vehicles. In specific they use flapping wings instead of spinning blades to move and steer. This allows them to be lightweight and highly manoeuvrable. They also present an interesting case for studying nonlinear system dynamics and control in periodic settings.
Nonetheless, the aerodynamic forces generated by flapping are not easily quantifiable. The project aims in modelling the unknown ornithopter dynamical system starting from first principles and moving towards model identification and learning techniques through experimental testing. The second part of the project will focus in synthesising a controller that employs the developed model and exploits the periodic properties of the system.
Professor: Colin Jones
Type of project: Semester
Assistants: Sanket Diwale and Ioannis Lymperopoulos
Student: Paul Dreyfus
B056——————————————————————————–
 Real-time optimization of a fuel cell system
Real-time optimization of a fuel cell system
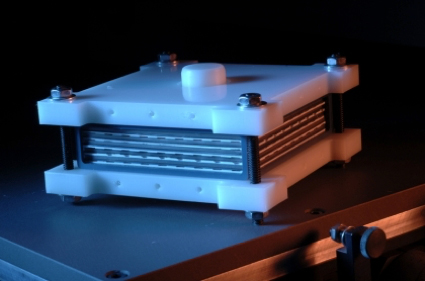
Solid oxide fuel cells (SOFCs) are electrochemical systems converting hydrogen and oxygen to water and thereby converting chemical energy into electrical energy. Due to their high efficiency SOFCs could potentially replace large fossil-fuel driven power plants in the future. For safety and economical reasons, SOFCs should be operated in a safe operating region and close to their maximal efficiency.
Video of the SOFC’s working principle:www.youtube.com/watch
We propose to investigate the real-time optimization (RTO) of a complete SOFC system. The project aims at the formulation and solution of optimization problems using Matlab. More precisely, the project involves the following tasks:
- Analysis of the current SOFC models.
- Survey of the existing RTO implementations for SOFC systems.
- Design of different optimization problems for a complete SOFC system, following power– driven and efficiency-driven policies.
- Literature search on combined fuel-reforming and SOFC systems.
- Simulation of the proposed formulations for different operating modes of the SOFC.
Candidates should have a good background in Matlab programming, control and optimization. Some knowledge of fuels cells would be a plus.
Professor: Dominique Bonvin, Jan van Herle
Type of project: Semester
Assistants: Tafarel de Avila Ferreira, Alejandro Marchetti
Student: Laetitia Anglade
MP001——————————————————————————–
 Biomechanical Model of the Shoulder to Address the Joint Translation
Biomechanical Model of the Shoulder to Address the Joint Translation
Given the complexity of musculoskeletal structure of the human shoulder, the associated treatments do not always result in optimal solutions. Knowledge about muscle forces and joint translations can help improve the associated treatments. However, direct measurement of these quantities without invasive surgery is not yet possible. Biomechanical models of the shoulder allow non-invasive estimation of the muscle forces. Information about these translations is in high clinical demand to address the joint dislocation and implant design. This project aims at exploiting feedback control to address the joint translations in the main shoulder joint.
Professor: Dominique Pioletti and Philippe Mullhaupt
Type of project: Semester
Contact: Ehsan Sarshari
Student: Mathilde Lestoille